 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoxtral TTS
Mar 26, 2026We introduce Voxtral TTS, an expressive multilingual text-to-speech model that generates natural speech from as little as 3 seconds of reference audio. Voxtral TTS adopts a hybrid architecture that combines auto-regressive generation of semantic speech tokens with flow-matching for acoustic tokens. These tokens are encoded and decoded with Voxtral Codec, a speech tokenizer trained from scratch with a hybrid VQ-FSQ quantization scheme. In human evaluations conducted by native speakers, Voxtral TTS is preferred for multilingual voice cloning due to its naturalness and expressivity, achieving a 68.4\% win rate over ElevenLabs Flash v2.5. We release the model weights under a CC BY-NC license.
Voxtral Realtime
Feb 11, 2026We introduce Voxtral Realtime, a natively streaming automatic speech recognition model that matches offline transcription quality at sub-second latency. Unlike approaches that adapt offline models through chunking or sliding windows, Voxtral Realtime is trained end-to-end for streaming, with explicit alignment between audio and text streams. Our architecture builds on the Delayed Streams Modeling framework, introducing a new causal audio encoder and Ada RMS-Norm for improved delay conditioning. We scale pretraining to a large-scale dataset spanning 13 languages. At a delay of 480ms, Voxtral Realtime achieves performance on par with Whisper, the most widely deployed offline transcription system. We release the model weights under the Apache 2.0 license.
Ministral 3
Jan 13, 2026We introduce the Ministral 3 series, a family of parameter-efficient dense language models designed for compute and memory constrained applications, available in three model sizes: 3B, 8B, and 14B parameters. For each model size, we release three variants: a pretrained base model for general-purpose use, an instruction finetuned, and a reasoning model for complex problem-solving. In addition, we present our recipe to derive the Ministral 3 models through Cascade Distillation, an iterative pruning and continued training with distillation technique. Each model comes with image understanding capabilities, all under the Apache 2.0 license.
Voxtral
Jul 17, 2025We present Voxtral Mini and Voxtral Small, two multimodal audio chat models. Voxtral is trained to comprehend both spoken audio and text documents, achieving state-of-the-art performance across a diverse range of audio benchmarks, while preserving strong text capabilities. Voxtral Small outperforms a number of closed-source models, while being small enough to run locally. A 32K context window enables the model to handle audio files up to 40 minutes in duration and long multi-turn conversations. We also contribute three benchmarks for evaluating speech understanding models on knowledge and trivia. Both Voxtral models are released under Apache 2.0 license.
Magistral
Jun 12, 2025



We introduce Magistral, Mistral's first reasoning model and our own scalable reinforcement learning (RL) pipeline. Instead of relying on existing implementations and RL traces distilled from prior models, we follow a ground up approach, relying solely on our own models and infrastructure. Notably, we demonstrate a stack that enabled us to explore the limits of pure RL training of LLMs, present a simple method to force the reasoning language of the model, and show that RL on text data alone maintains most of the initial checkpoint's capabilities. We find that RL on text maintains or improves multimodal understanding, instruction following and function calling. We present Magistral Medium, trained for reasoning on top of Mistral Medium 3 with RL alone, and we open-source Magistral Small (Apache 2.0) which further includes cold-start data from Magistral Medium.
Pixtral 12B
Oct 09, 2024



We introduce Pixtral-12B, a 12--billion-parameter multimodal language model. Pixtral-12B is trained to understand both natural images and documents, achieving leading performance on various multimodal benchmarks, surpassing a number of larger models. Unlike many open-source models, Pixtral is also a cutting-edge text model for its size, and does not compromise on natural language performance to excel in multimodal tasks. Pixtral uses a new vision encoder trained from scratch, which allows it to ingest images at their natural resolution and aspect ratio. This gives users flexibility on the number of tokens used to process an image. Pixtral is also able to process any number of images in its long context window of 128K tokens. Pixtral 12B substanially outperforms other open models of similar sizes (Llama-3.2 11B \& Qwen-2-VL 7B). It also outperforms much larger open models like Llama-3.2 90B while being 7x smaller. We further contribute an open-source benchmark, MM-MT-Bench, for evaluating vision-language models in practical scenarios, and provide detailed analysis and code for standardized evaluation protocols for multimodal LLMs. Pixtral-12B is released under Apache 2.0 license.
BOND: Aligning LLMs with Best-of-N Distillation
Jul 19, 2024



Reinforcement learning from human feedback (RLHF) is a key driver of quality and safety in state-of-the-art large language models. Yet, a surprisingly simple and strong inference-time strategy is Best-of-N sampling that selects the best generation among N candidates. In this paper, we propose Best-of-N Distillation (BOND), a novel RLHF algorithm that seeks to emulate Best-of-N but without its significant computational overhead at inference time. Specifically, BOND is a distribution matching algorithm that forces the distribution of generations from the policy to get closer to the Best-of-N distribution. We use the Jeffreys divergence (a linear combination of forward and backward KL) to balance between mode-covering and mode-seeking behavior, and derive an iterative formulation that utilizes a moving anchor for efficiency. We demonstrate the effectiveness of our approach and several design choices through experiments on abstractive summarization and Gemma models. Aligning Gemma policies with BOND outperforms other RLHF algorithms by improving results on several benchmarks.
Gemma: Open Models Based on Gemini Research and Technology
Mar 13, 2024



This work introduces Gemma, a family of lightweight, state-of-the art open models built from the research and technology used to create Gemini models. Gemma models demonstrate strong performance across academic benchmarks for language understanding, reasoning, and safety. We release two sizes of models (2 billion and 7 billion parameters), and provide both pretrained and fine-tuned checkpoints. Gemma outperforms similarly sized open models on 11 out of 18 text-based tasks, and we present comprehensive evaluations of safety and responsibility aspects of the models, alongside a detailed description of model development. We believe the responsible release of LLMs is critical for improving the safety of frontier models, and for enabling the next wave of LLM innovations.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Zeroth-order non-convex learning via hierarchical dual averaging
Sep 13, 2021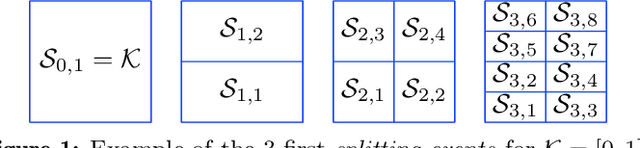
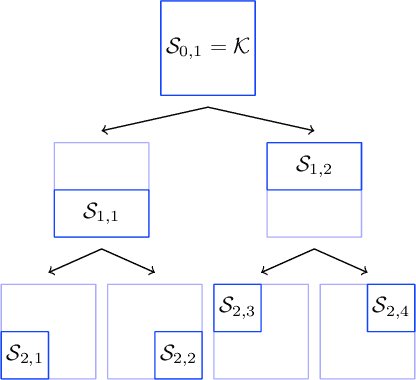
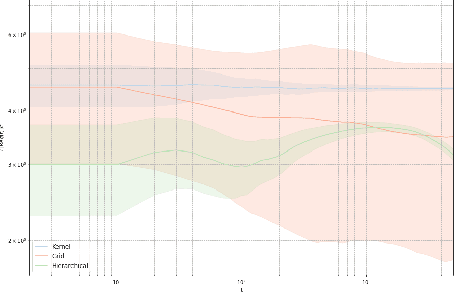
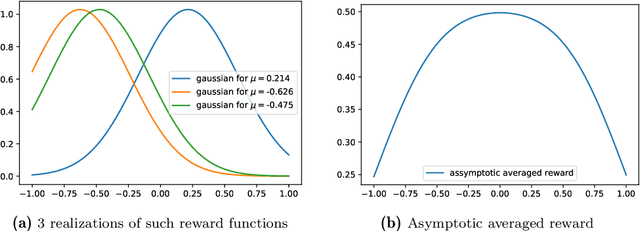
We propose a hierarchical version of dual averaging for zeroth-order online non-convex optimization - i.e., learning processes where, at each stage, the optimizer is facing an unknown non-convex loss function and only receives the incurred loss as feedback. The proposed class of policies relies on the construction of an online model that aggregates loss information as it arrives, and it consists of two principal components: (a) a regularizer adapted to the Fisher information metric (as opposed to the metric norm of the ambient space); and (b) a principled exploration of the problem's state space based on an adapted hierarchical schedule. This construction enables sharper control of the model's bias and variance, and allows us to derive tight bounds for both the learner's static and dynamic regret - i.e., the regret incurred against the best dynamic policy in hindsight over the horizon of play.