 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStop-Think-AutoRegress: Language Modeling with Latent Diffusion Planning
Feb 24, 2026The Stop-Think-AutoRegress Language Diffusion Model (STAR-LDM) integrates latent diffusion planning with autoregressive generation. Unlike conventional autoregressive language models limited to token-by-token decisions, STAR-LDM incorporates a "thinking" phase that pauses generation to refine a semantic plan through diffusion before continuing. This enables global planning in continuous space prior to committing to discrete tokens. Evaluations show STAR-LDM significantly outperforms similar-sized models on language understanding benchmarks and achieves $>70\%$ win rates in LLM-as-judge comparisons for narrative coherence and commonsense reasoning. The architecture also allows straightforward control through lightweight classifiers, enabling fine-grained steering of attributes without model retraining while maintaining better fluency-control trade-offs than specialized approaches.
DiffuBox: Refining 3D Object Detection with Point Diffusion
May 25, 2024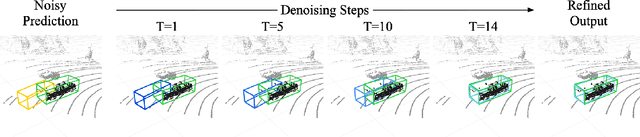
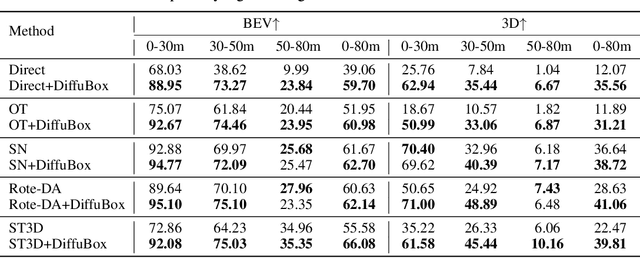
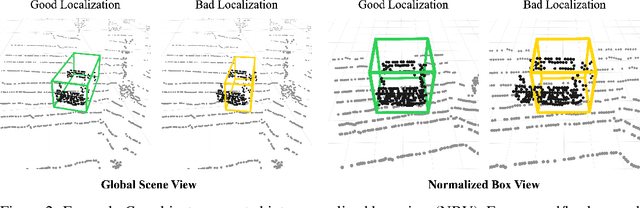
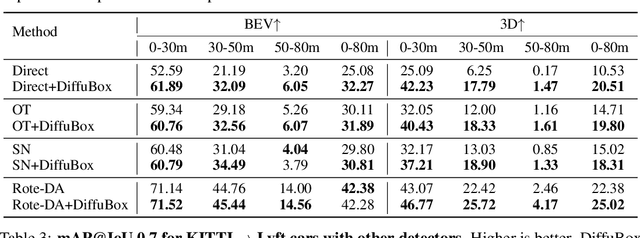
Ensuring robust 3D object detection and localization is crucial for many applications in robotics and autonomous driving. Recent models, however, face difficulties in maintaining high performance when applied to domains with differing sensor setups or geographic locations, often resulting in poor localization accuracy due to domain shift. To overcome this challenge, we introduce a novel diffusion-based box refinement approach. This method employs a domain-agnostic diffusion model, conditioned on the LiDAR points surrounding a coarse bounding box, to simultaneously refine the box's location, size, and orientation. We evaluate this approach under various domain adaptation settings, and our results reveal significant improvements across different datasets, object classes and detectors.