 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
InstanceFlow: Visualizing the Evolution of Classifier Confusion on the Instance Level
Jul 22, 2020
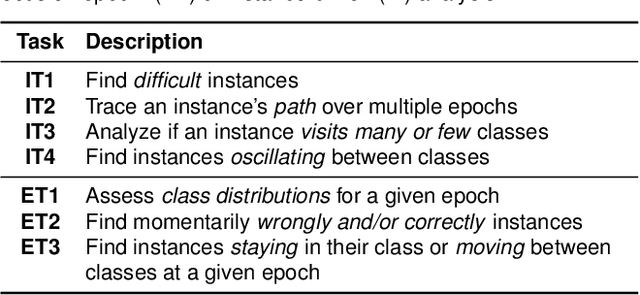
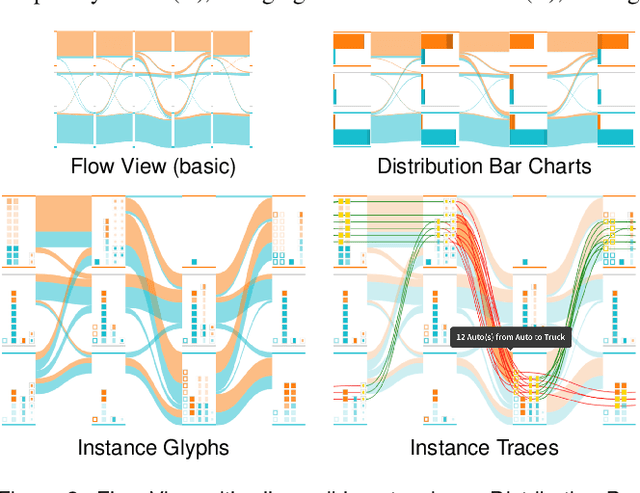
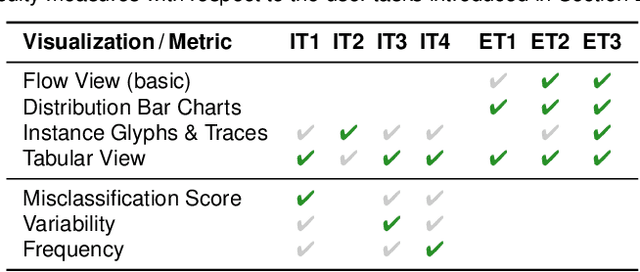
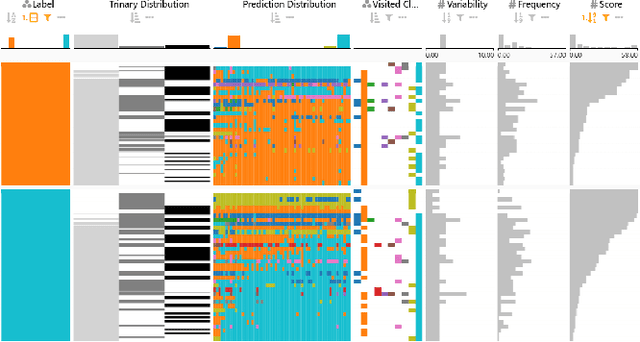
Classification is one of the most important supervised machine learning tasks. During the training of a classification model, the training instances are fed to the model multiple times (during multiple epochs) in order to iteratively increase the classification performance. The increasing complexity of models has led to a growing demand for model interpretabilty through visualizations. Existing approaches mostly focus on the visual analysis of the final model performance after training and are often limited to aggregate performance measures. In this paper we introduce InstanceFlow, a novel dual-view visualization tool that allows users to analyze the learning behavior of classifiers over time on the instance-level. A Sankey diagram visualizes the flow of instances throughout epochs, with on-demand detailed glyphs and traces for individual instances. A tabular view allows users to locate interesting instances by ranking and filtering. In this way, InstanceFlow bridges the gap between class-level and instance-level performance evaluation while enabling users to perform a full temporal analysis of the training process.
Discovering Nonlinear Relations with Minimum Predictive Information Regularization
Jan 07, 2020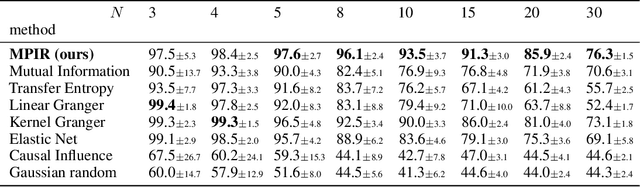
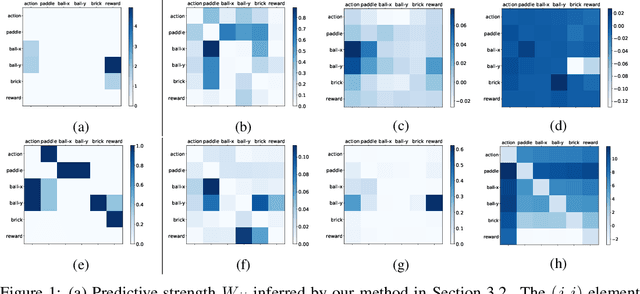
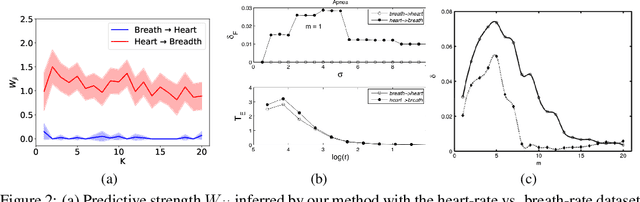
Identifying the underlying directional relations from observational time series with nonlinear interactions and complex relational structures is key to a wide range of applications, yet remains a hard problem. In this work, we introduce a novel minimum predictive information regularization method to infer directional relations from time series, allowing deep learning models to discover nonlinear relations. Our method substantially outperforms other methods for learning nonlinear relations in synthetic datasets, and discovers the directional relations in a video game environment and a heart-rate vs. breath-rate dataset.
A Distilled Model for Tracking and Tracker Fusion
Jul 08, 2020
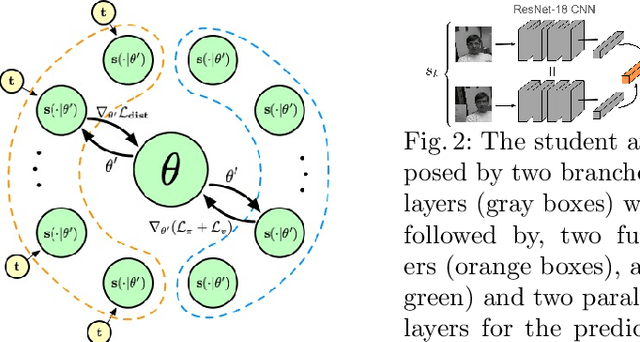
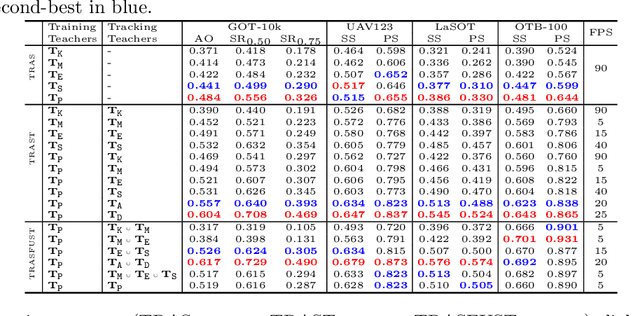
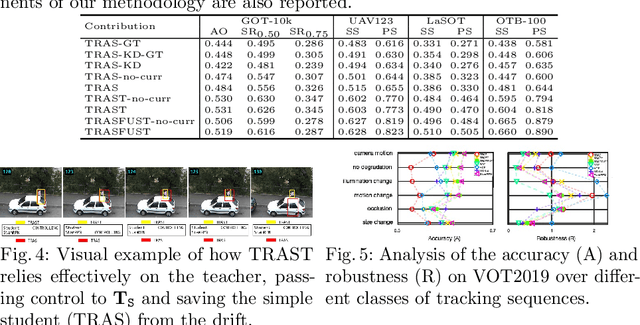
Visual object tracking was generally tackled by reasoning independently on fast processing algorithms, accurate online adaptation methods, and fusion of trackers. In this paper, we unify such goals by proposing a novel tracking methodology that takes advantage of other visual trackers, offline and online. A compact student model is trained via the marriage of knowledge distillation and reinforcement learning. The first allows to transfer and compress tracking knowledge of other trackers. The second enables the learning of evaluation measures which are then exploited online. After learning, the student can be ultimately used to build (i) a very fast single-shot tracker, (ii) a tracker with a simple and effective online adaptation mechanism, (iii) a tracker that performs fusion of other trackers. Extensive validation shows that the proposed algorithms compete with state-of-the-art trackers while running in real-time.
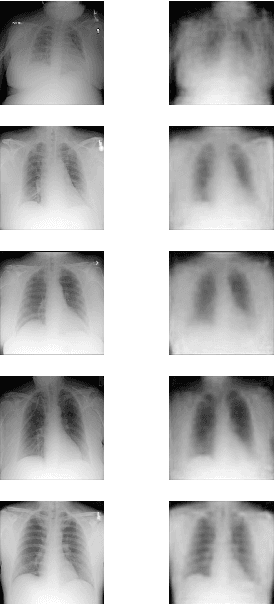
RANDGAN: Randomized Generative Adversarial Network for Detection of COVID-19 in Chest X-ray
Oct 06, 2020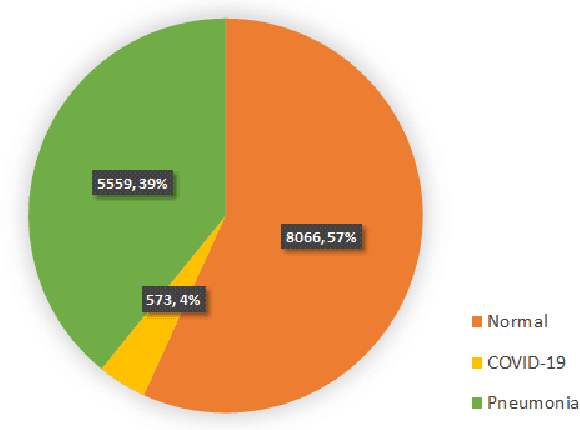
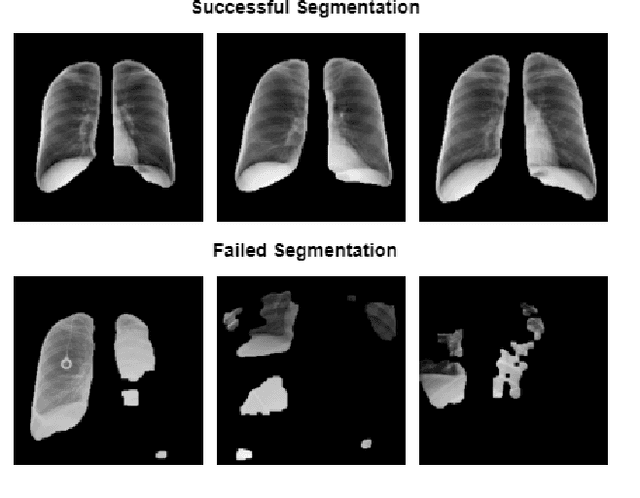
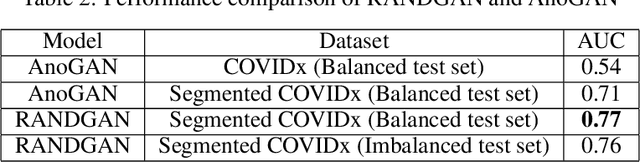
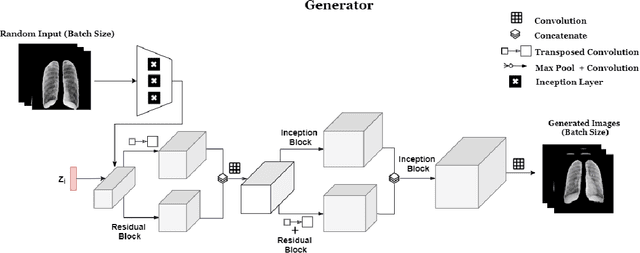
COVID-19 spread across the globe at an immense rate has left healthcare systems incapacitated to diagnose and test patients at the needed rate. Studies have shown promising results for detection of COVID-19 from viral bacterial pneumonia in chest X-rays. Automation of COVID-19 testing using medical images can speed up the testing process of patients where health care systems lack sufficient numbers of the reverse-transcription polymerase chain reaction (RT-PCR) tests. Supervised deep learning models such as convolutional neural networks (CNN) need enough labeled data for all classes to correctly learn the task of detection. Gathering labeled data is a cumbersome task and requires time and resources which could further strain health care systems and radiologists at the early stages of a pandemic such as COVID-19. In this study, we propose a randomized generative adversarial network (RANDGAN) that detects images of an unknown class (COVID-19) from known and labelled classes (Normal and Viral Pneumonia) without the need for labels and training data from the unknown class of images (COVID-19). We used the largest publicly available COVID-19 chest X-ray dataset, COVIDx, which is comprised of Normal, Pneumonia, and COVID-19 images from multiple public databases. In this work, we use transfer learning to segment the lungs in the COVIDx dataset. Next, we show why segmentation of the region of interest (lungs) is vital to correctly learn the task of classification, specifically in datasets that contain images from different resources as it is the case for the COVIDx dataset. Finally, we show improved results in detection of COVID-19 cases using our generative model (RANDGAN) compared to conventional generative adversarial networks (GANs) for anomaly detection in medical images, improving the area under the ROC curve from 0.71 to 0.77.
PolarNet: An Improved Grid Representation for Online LiDAR Point Clouds Semantic Segmentation
Mar 31, 2020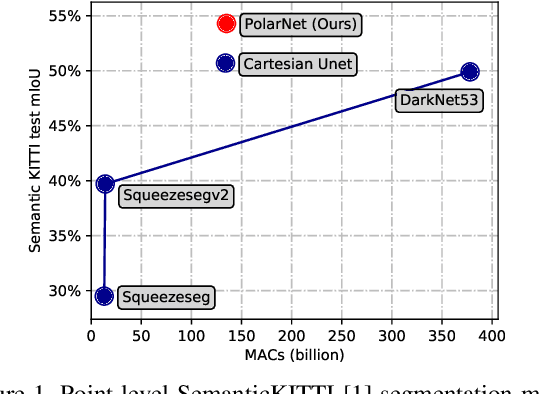

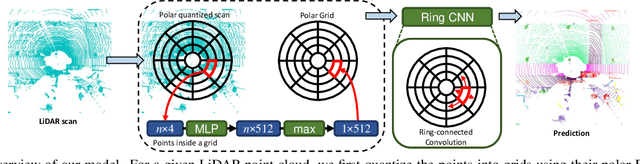
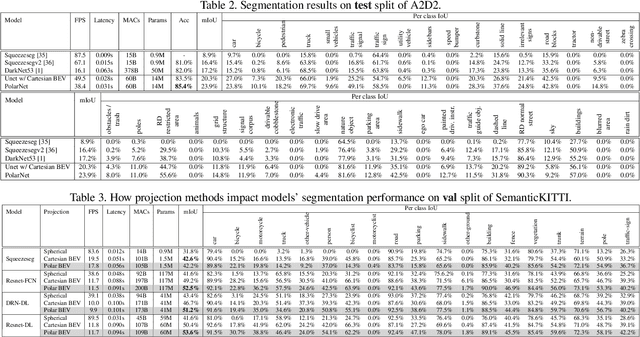
The requirement of fine-grained perception by autonomous driving systems has resulted in recently increased research in the online semantic segmentation of single-scan LiDAR. Emerging datasets and technological advancements have enabled researchers to benchmark this problem and improve the applicable semantic segmentation algorithms. Still, online semantic segmentation of LiDAR scans in autonomous driving applications remains challenging due to three reasons: (1) the need for near-real-time latency with limited hardware, (2) points are distributed unevenly across space, and (3) an increasing number of more fine-grained semantic classes. The combination of the aforementioned challenges motivates us to propose a new LiDAR-specific, KNN-free segmentation algorithm - PolarNet. Instead of using common spherical or bird's-eye-view projection, our polar bird's-eye-view representation balances the points per grid and thus indirectly redistributes the network's attention over the long-tailed points distribution over the radial axis in polar coordination. We find that our encoding scheme greatly increases the mIoU in three drastically different real urban LiDAR single-scan segmentation datasets while retaining ultra low latency and near real-time throughput.
Stabilization of Complementarity Systems via Contact-Aware Controllers
Aug 03, 2020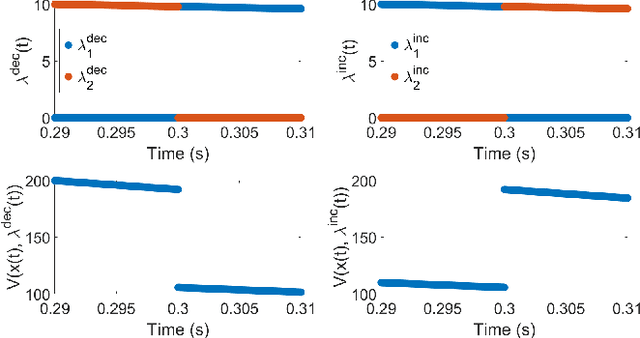
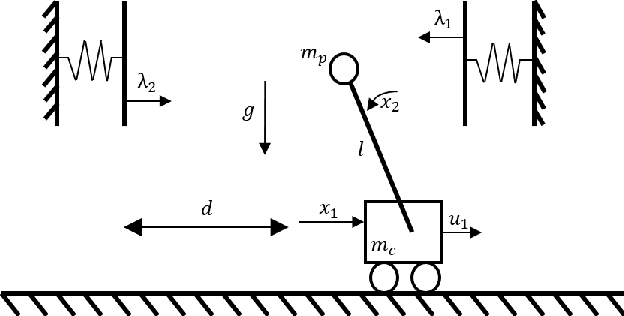
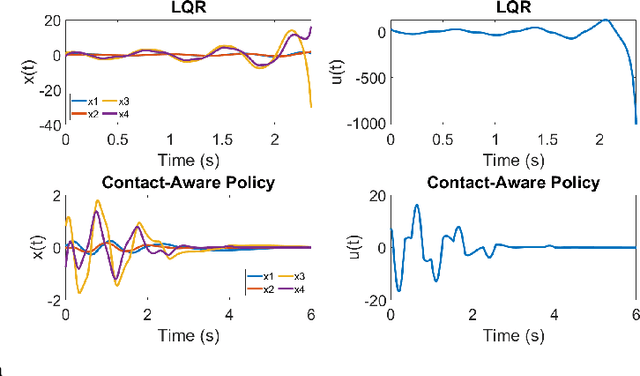
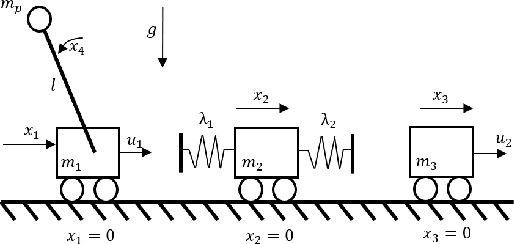
We propose a framework for provably stable local control of multi-contact robotic systems, directly utilizing force measurements and exploiting the complementarity structure of contact dynamics. Since many robotic tasks, like manipulation and locomotion, are fundamentally based in making and breaking contact with the environment, state-of-the-art control policies struggle to deal with the hybrid nature of multi-contact motion. Such controllers often rely heavily upon heuristics or, due to the combinatoric structure in the dynamics, are unsuitable for real-time control. Principled deployment of tactile sensors offers a promising mechanism for stable and robust control, but modern approaches often use this data in an ad hoc manner, for instance to guide guarded moves. In this work, we present a control framework which can close the loop on tactile sensors. Critically, this framework is non-combinatoric, enabling optimization algorithms to automatically synthesize provably stable control policies. We demonstrate this approach on multiple examples, including underactuated multi-contact problems, quasi-static friction problems and a high-dimensional problem with ten contacts.
COVIDomaly: A Deep Convolutional Autoencoder Approach for Detecting Early Cases of COVID-19
Oct 06, 2020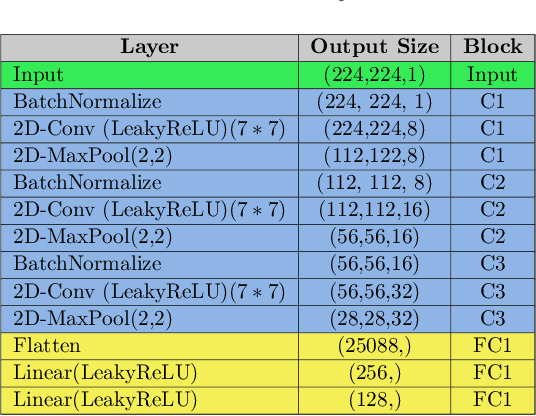

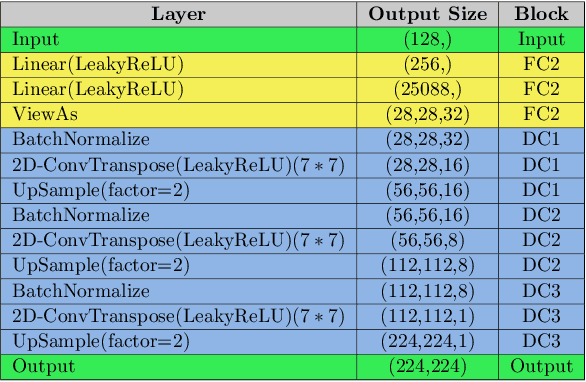
As of September 2020, the COVID-19 pandemic continues to devastate the health and well-being of the global population. With more than 33 million confirmed cases and over a million deaths, global health organizations are still a long way from fully containing the pandemic. This pandemic has raised serious questions about the emergency preparedness of health agencies, not only in terms of treatment of an unseen disease, but also in identifying its early symptoms. In the particular case of COVID-19, several studies have indicated that chest radiography images of the infected patients show characteristic abnormalities. However, at the onset of a given pandemic, such as COVID-19, there may not be sufficient data for the affected cases to train models for their robust detection. Hence, supervised classification is ill-posed for this problem because the time spent in collecting large amounts of infected peoples' data could lead to the loss of human lives and delays in preventive interventions. Therefore, we formulate this problem within a one-class classification framework, in which the data for healthy patients is abundantly available, whereas no training data is present for the class of interest (COVID-19 in our case). To solve this problem, we present COVIDomaly, a convolutional autoencoder framework to detect unseen COVID-19 cases from the chest radiographs. We tested two settings on a publicly available dataset (COVIDx) by training the model on chest X-rays from (i) only healthy adults, and (ii) healthy and other non-COVID-19 pneumonia, and detected COVID-19 as an anomaly. After performing 3-fold cross validation, we obtain a pooled ROC-AUC of 0.7652 and 0.6902 in the two settings respectively. These results are very encouraging and pave the way towards research for ensuring emergency preparedness in future pandemics, especially the ones that could be detected from chest X-rays.
Using local dynamics to explain analog forecasting of chaotic systems
Jul 22, 2020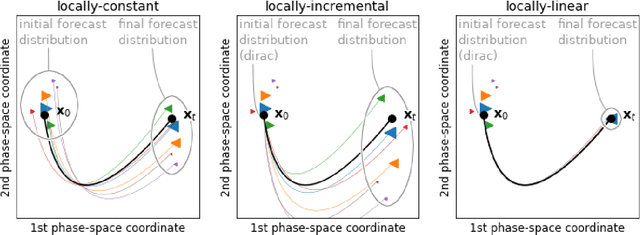
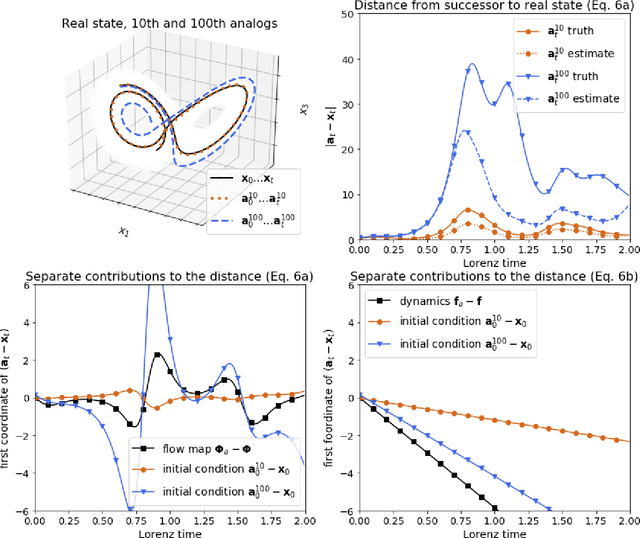
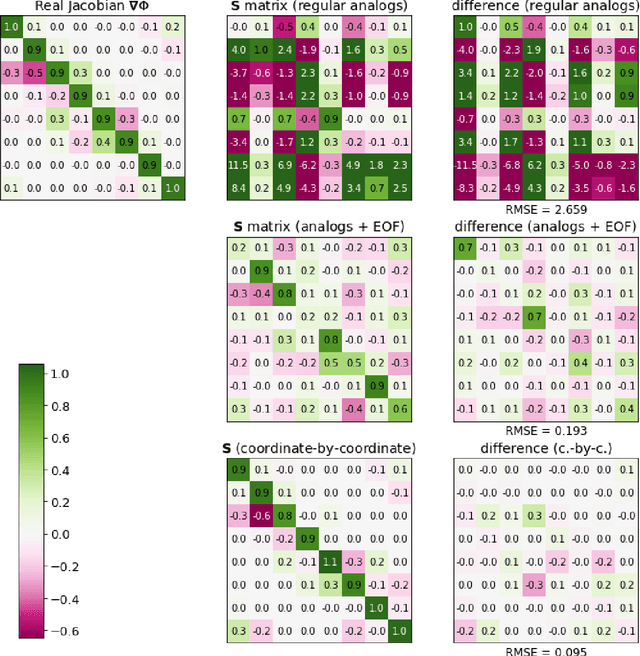
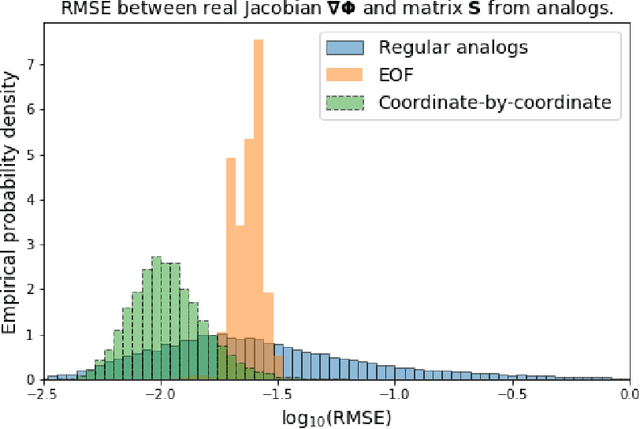
Analogs are nearest neighbors of the state of a system. By using analogs and their successors in time, one is able to produce empirical forecasts. Several analog forecasting methods have been used in atmospheric applications and tested on well-known dynamical systems. Although efficient in practice, theoretical connections between analog methods and dynamical systems have been overlooked. Analog forecasting can be related to the real dynamical equations of the system of interest. This study investigates the properties of different analog forecasting strategies by taking local approximations of the system's dynamics. We find that analog forecasting performances are highly linked to the local Jacobian matrix of the flow map, and that analog forecasting combined with linear regression allows to capture projections of this Jacobian matrix. The proposed methodology allows to estimate analog forecasting errors, and to compare different analog methods. These results are derived analytically and tested numerically on two simple chaotic dynamical systems.
A Graph-constrained Changepoint Detection Approach for ECG Segmentation
Apr 24, 2020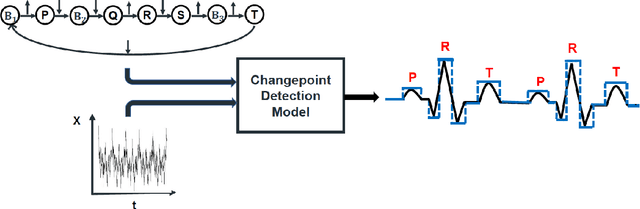
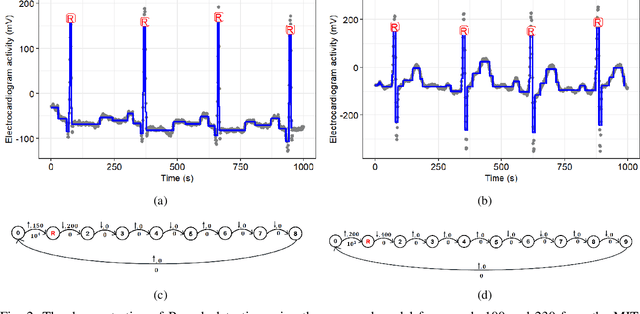
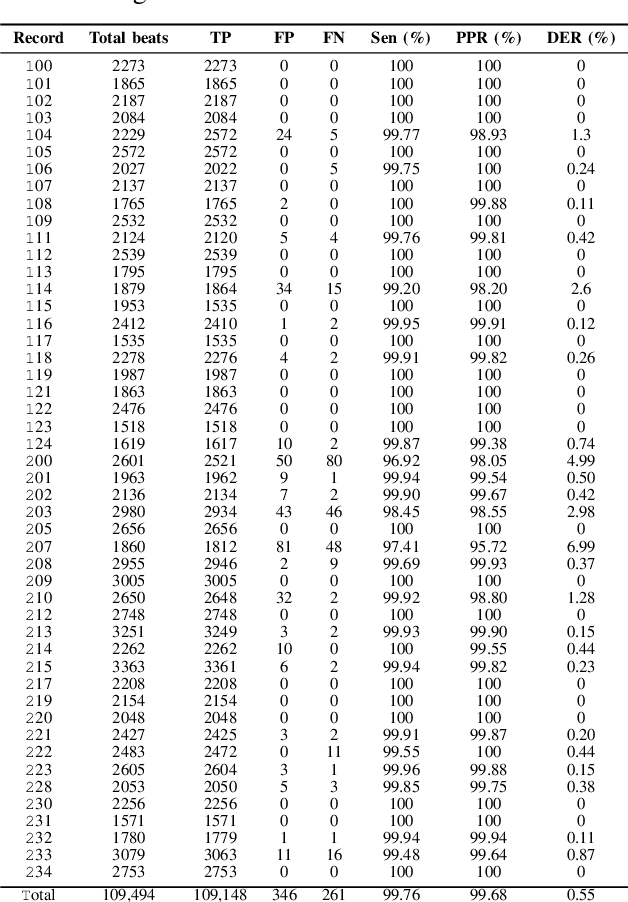
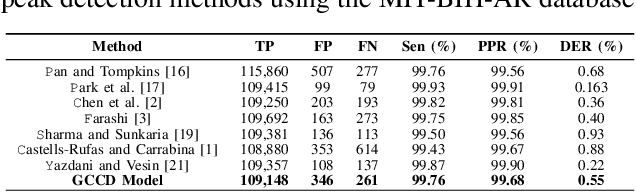
Electrocardiogram (ECG) signal is the most commonly used non-invasive tool in the assessment of cardiovascular diseases. Segmentation of the ECG signal to locate its constitutive waves, in particular the R-peaks, is a key step in ECG processing and analysis. Over the years, several segmentation and QRS complex detection algorithms have been proposed with different features; however, their performance highly depends on applying preprocessing steps which makes them unreliable in real-time data analysis of ambulatory care settings and remote monitoring systems, where the collected data is highly noisy. Moreover, some issues still remain with the current algorithms in regard to the diverse morphological categories for the ECG signal and their high computation cost. In this paper, we introduce a novel graph-based optimal changepoint detection (GCCD) method for reliable detection of R-peak positions without employing any preprocessing step. The proposed model guarantees to compute the globally optimal changepoint detection solution. It is also generic in nature and can be applied to other time-series biomedical signals. Based on the MIT-BIH arrhythmia (MIT-BIH-AR) database, the proposed method achieves overall sensitivity Sen = 99.76, positive predictivity PPR = 99.68, and detection error rate DER = 0.55 which are comparable to other state-of-the-art approaches.
Rethinking Randomized Smoothing for Adversarial Robustness
Mar 02, 2020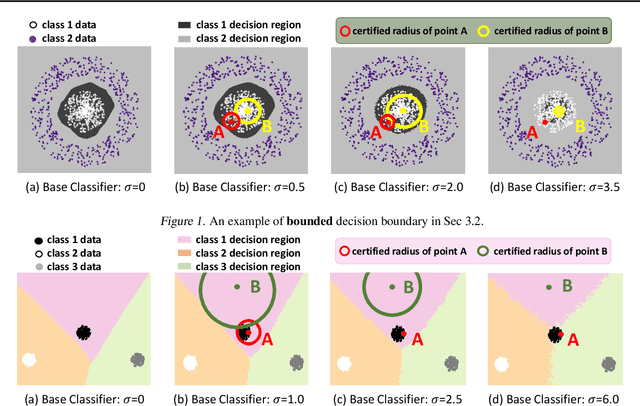
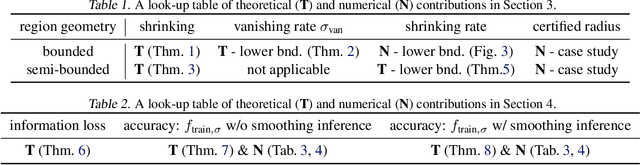
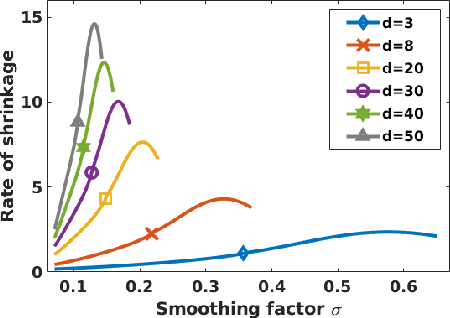
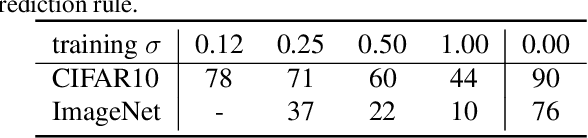
The fragility of modern machine learning models has drawn a considerable amount of attention from both academia and the public. While immense interests were in either crafting adversarial attacks as a way to measure the robustness of neural networks or devising worst-case analytical robustness verification with guarantees, few methods could enjoy both scalability and robustness guarantees at the same time. As an alternative to these attempts, randomized smoothing adopts a different prediction rule that enables statistical robustness arguments and can scale to large networks. However, in this paper, we point out for the first time the side effects of current randomized smoothing workflows. Specifically, we articulate and prove two major points: 1) the decision boundaries shrink with the adoption of randomized smoothing prediction rule; 2) noise augmentation does not necessarily resolve the shrinking issue and can even create additional issues.