 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximating Global Contact-Implicit MPC via Sampling and Local Complementarity
May 19, 2025To achieve general-purpose dexterous manipulation, robots must rapidly devise and execute contact-rich behaviors. Existing model-based controllers are incapable of globally optimizing in real-time over the exponential number of possible contact sequences. Instead, recent progress in contact-implicit control has leveraged simpler models that, while still hybrid, make local approximations. However, the use of local models inherently limits the controller to only exploit nearby interactions, potentially requiring intervention to richly explore the space of possible contacts. We present a novel approach which leverages the strengths of local complementarity-based control in combination with low-dimensional, but global, sampling of possible end-effector locations. Our key insight is to consider a contact-free stage preceding a contact-rich stage at every control loop. Our algorithm, in parallel, samples end effector locations to which the contact-free stage can move the robot, then considers the cost predicted by contact-rich MPC local to each sampled location. The result is a globally-informed, contact-implicit controller capable of real-time dexterous manipulation. We demonstrate our controller on precise, non-prehensile manipulation of non-convex objects using a Franka Panda arm. Project page: https://approximating-global-ci-mpc.github.io
Adaptive Contact-Implicit Model Predictive Control with Online Residual Learning
Oct 15, 2023



The hybrid nature of multi-contact robotic systems, due to making and breaking contact with the environment, creates significant challenges for high-quality control. Existing model-based methods typically rely on either good prior knowledge of the multi-contact model or require significant offline model tuning effort, thus resulting in low adaptability and robustness. In this paper, we propose a real-time adaptive multi-contact model predictive control framework, which enables online adaption of the hybrid multi-contact model and continuous improvement of the control performance for contact-rich tasks. This framework includes an adaption module, which continuously learns a residual of the hybrid model to minimize the gap between the prior model and reality, and a real-time multi-contact MPC controller. We demonstrated the effectiveness of the framework in synthetic examples, and applied it on hardware to solve contact-rich manipulation tasks, where a robot uses its end-effector to roll different unknown objects on a table to track given paths. The hardware experiments show that with a rough prior model, the multi-contact MPC controller adapts itself on-the-fly with an adaption rate around 20 Hz and successfully manipulates previously unknown objects with non-smooth surface geometries.
Consensus Complementarity Control for Multi-Contact MPC
Apr 21, 2023We propose a hybrid model predictive control algorithm, consensus complementarity control (C3), for systems that make and break contact with their environment. Many state-of-the-art controllers for tasks which require initiating contact with the environment, such as locomotion and manipulation, require a priori mode schedules or are too computationally complex to run at real-time rates. We present a method based on the alternating direction method of multipliers (ADMM) that is capable of high-speed reasoning over potential contact events. Via a consensus formulation, our approach enables parallelization of the contact scheduling problem. We validate our results on five numerical examples, including four high-dimensional frictional contact problems, and a physical experimentation on an underactuated multi-contact system. We further demonstrate the effectiveness of our method on a physical experiment accomplishing a high-dimensional, multi-contact manipulation task with a robot arm.
Learning Linear Complementarity Systems
Dec 25, 2021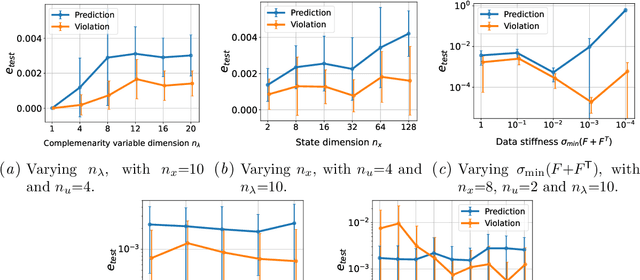
This paper investigates the learning, or system identification, of a class of piecewise-affine dynamical systems known as linear complementarity systems (LCSs). We propose a violation-based loss which enables efficient learning of the LCS parameterization, without prior knowledge of the hybrid mode boundaries, using gradient-based methods. The proposed violation-based loss incorporates both dynamics prediction loss and a novel complementarity - violation loss. We show several properties attained by this loss formulation, including its differentiability, the efficient computation of first- and second-order derivatives, and its relationship to the traditional prediction loss, which strictly enforces complementarity. We apply this violation-based loss formulation to learn LCSs with tens of thousands of (potentially stiff) hybrid modes. The results demonstrate a state-of-the-art ability to identify piecewise-affine dynamics, outperforming methods which must differentiate through non-smooth linear complementarity problems.
Real-Time Multi-Contact Model Predictive Control via ADMM
Sep 15, 2021
We propose a general hybrid model predictive control algorithm, consensus complementarity control (C3), for systems that make and break contact with their environment. Many state-of-the-art controllers for tasks which require initiating contact with the environment, such as locomotion and manipulation, require a priori mode schedules or are so computationally complex that they cannot run at real-time rates. We present a method, based on the alternating direction method of multipliers (ADMM), capable of highspeed reasoning over potential contact events. Via a consensus formulation, our approach enables parallelization of the contact scheduling problem. We validate our results on three numerical examples, including two frictional contact problems, and physical experimentation on an underactuated multi-contact system.
Stability Analysis of Complementarity Systems with Neural Network Controllers
Nov 15, 2020
Complementarity problems, a class of mathematical optimization problems with orthogonality constraints, are widely used in many robotics tasks, such as locomotion and manipulation, due to their ability to model non-smooth phenomena (e.g., contact dynamics). In this paper, we propose a method to analyze the stability of complementarity systems with neural network controllers. First, we introduce a method to represent neural networks with rectified linear unit (ReLU) activations as the solution to a linear complementarity problem. Then, we show that systems with ReLU network controllers have an equivalent linear complementarity system (LCS) description. Using the LCS representation, we turn the stability verification problem into a linear matrix inequality (LMI) feasibility problem. We demonstrate the approach on several examples, including multi-contact problems and friction models with non-unique solutions.
Stabilization of Complementarity Systems via Contact-Aware Controllers
Aug 03, 2020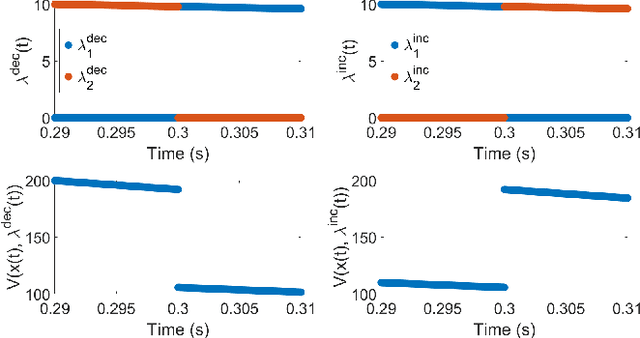
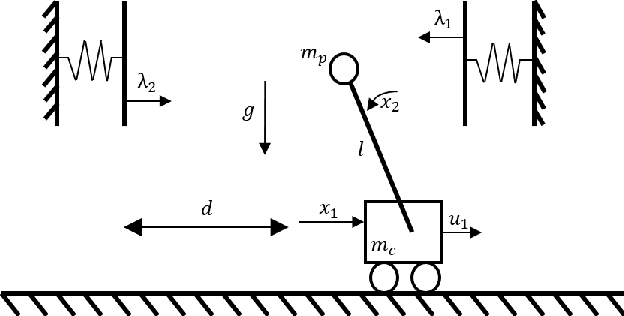
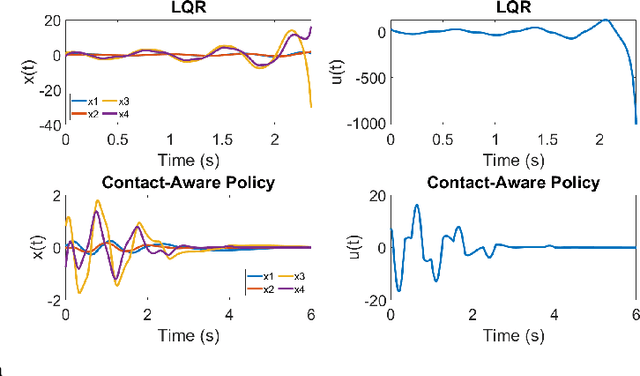
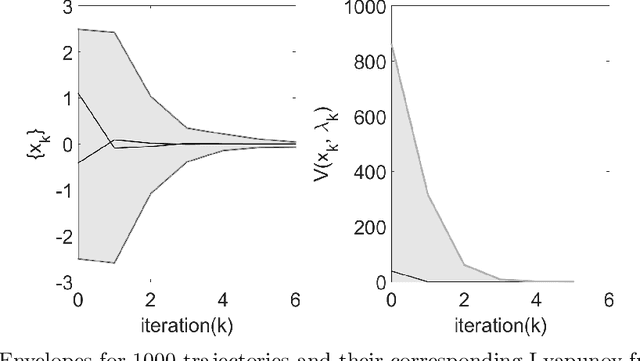
We propose a framework for provably stable local control of multi-contact robotic systems, directly utilizing force measurements and exploiting the complementarity structure of contact dynamics. Since many robotic tasks, like manipulation and locomotion, are fundamentally based in making and breaking contact with the environment, state-of-the-art control policies struggle to deal with the hybrid nature of multi-contact motion. Such controllers often rely heavily upon heuristics or, due to the combinatoric structure in the dynamics, are unsuitable for real-time control. Principled deployment of tactile sensors offers a promising mechanism for stable and robust control, but modern approaches often use this data in an ad hoc manner, for instance to guide guarded moves. In this work, we present a control framework which can close the loop on tactile sensors. Critically, this framework is non-combinatoric, enabling optimization algorithms to automatically synthesize provably stable control policies. We demonstrate this approach on multiple examples, including underactuated multi-contact problems, quasi-static friction problems and a high-dimensional problem with ten contacts.
Contact-Aware Controller Design for Complementarity Systems
Sep 24, 2019
While many robotic tasks, like manipulation and locomotion, are fundamentally based in making and breaking contact with the environment, state-of-the-art control policies struggle to deal with the hybrid nature of multi-contact motion. Such controllers often rely heavily upon heuristics or, due to the combinatoric structure in the dynamics, are unsuitable for real-time control. Principled deployment of tactile sensors offers a promising mechanism for stable and robust control, but modern approaches often use this data in an ad hoc manner, for instance to guide guarded moves. In this work, by exploiting the complementarity structure of contact dynamics, we propose a control framework which can close the loop on rich, tactile sensors. Critically, this framework is non-combinatoric, enabling optimization algorithms to automatically synthesize provably stable control policies. We demonstrate this approach on three different underactuated, multi-contact robotics problems.