 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Skill Extraction from Job Postings using Weak Supervision
Sep 16, 2022
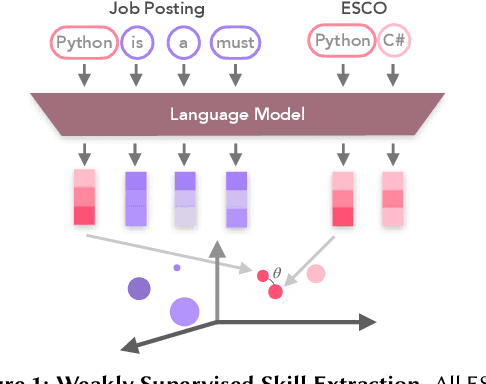
Aggregated data obtained from job postings provide powerful insights into labor market demands, and emerging skills, and aid job matching. However, most extraction approaches are supervised and thus need costly and time-consuming annotation. To overcome this, we propose Skill Extraction with Weak Supervision. We leverage the European Skills, Competences, Qualifications and Occupations taxonomy to find similar skills in job ads via latent representations. The method shows a strong positive signal, outperforming baselines based on token-level and syntactic patterns.
Semantic Segmentation for Autonomous Driving: Model Evaluation, Dataset Generation, Perspective Comparison, and Real-Time Capability
Jul 26, 2022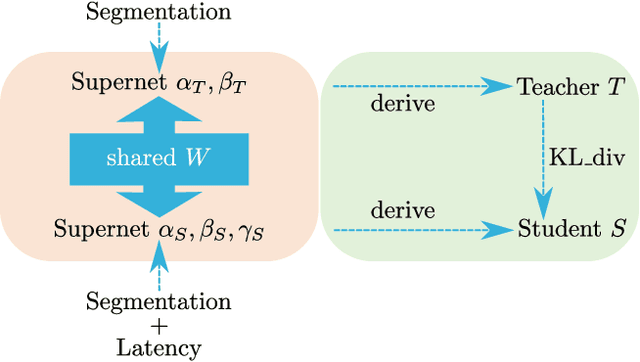
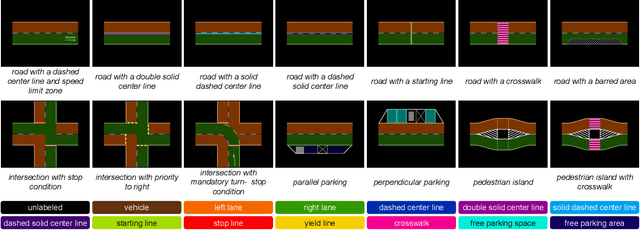
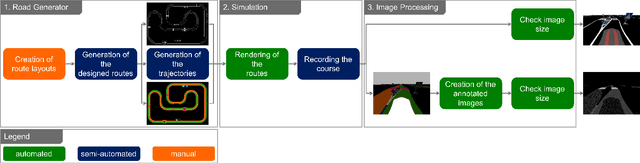
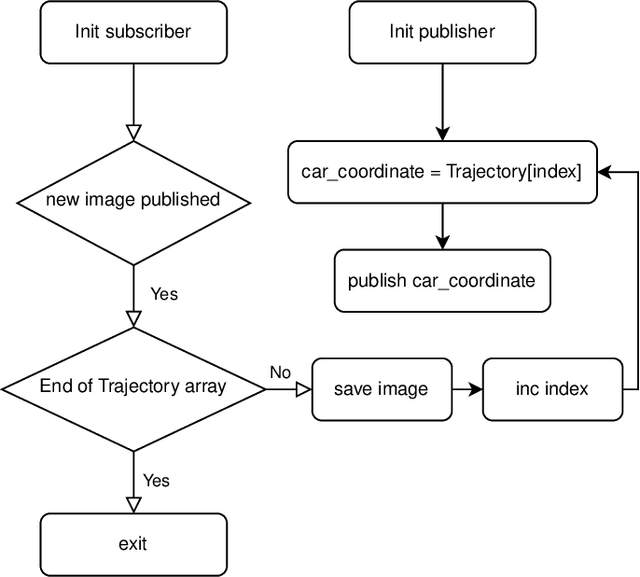
Environmental perception is an important aspect within the field of autonomous vehicles that provides crucial information about the driving domain, including but not limited to identifying clear driving areas and surrounding obstacles. Semantic segmentation is a widely used perception method for self-driving cars that associates each pixel of an image with a predefined class. In this context, several segmentation models are evaluated regarding accuracy and efficiency. Experimental results on the generated dataset confirm that the segmentation model FasterSeg is fast enough to be used in realtime on lowpower computational (embedded) devices in self-driving cars. A simple method is also introduced to generate synthetic training data for the model. Moreover, the accuracy of the first-person perspective and the bird's eye view perspective are compared. For a $320 \times 256$ input in the first-person perspective, FasterSeg achieves $65.44\,\%$ mean Intersection over Union (mIoU), and for a $320 \times 256$ input from the bird's eye view perspective, FasterSeg achieves $64.08\,\%$ mIoU. Both perspectives achieve a frame rate of $247.11$ Frames per Second (FPS) on the NVIDIA Jetson AGX Xavier. Lastly, the frame rate and the accuracy with respect to the arithmetic 16-bit Floating Point (FP16) and 32-bit Floating Point (FP32) of both perspectives are measured and compared on the target hardware.
Unsupervised Neural Stylistic Text Generation using Transfer learning and Adapters
Oct 07, 2022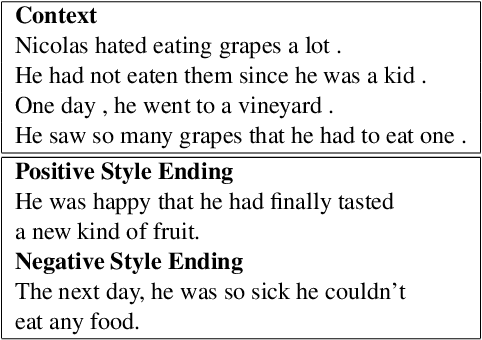

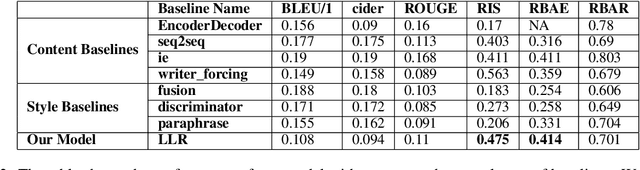

Research has shown that personality is a key driver to improve engagement and user experience in conversational systems. Conversational agents should also maintain a consistent persona to have an engaging conversation with a user. However, text generation datasets are often crowd sourced and thereby have an averaging effect where the style of the generation model is an average style of all the crowd workers that have contributed to the dataset. While one can collect persona-specific datasets for each task, it would be an expensive and time consuming annotation effort. In this work, we propose a novel transfer learning framework which updates only $0.3\%$ of model parameters to learn style specific attributes for response generation. For the purpose of this study, we tackle the problem of stylistic story ending generation using the ROC stories Corpus. We learn style specific attributes from the PERSONALITY-CAPTIONS dataset. Through extensive experiments and evaluation metrics we show that our novel training procedure can improve the style generation by 200 over Encoder-Decoder baselines while maintaining on-par content relevance metrics with
Breaking BERT: Evaluating and Optimizing Sparsified Attention
Oct 07, 2022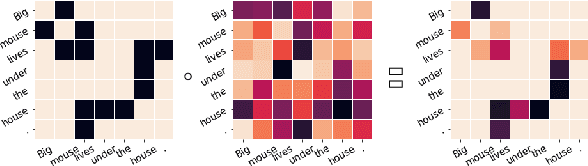
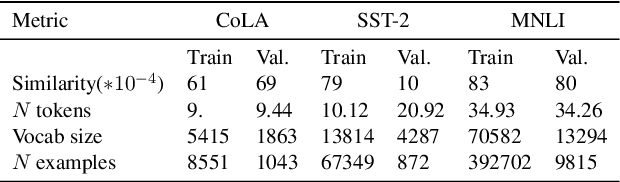
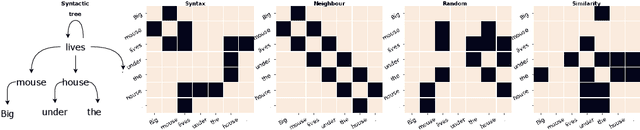

Transformers allow attention between all pairs of tokens, but there is reason to believe that most of these connections - and their quadratic time and memory - may not be necessary. But which ones? We evaluate the impact of sparsification patterns with a series of ablation experiments. First, we compare masks based on syntax, lexical similarity, and token position to random connections, and measure which patterns reduce performance the least. We find that on three common finetuning tasks even using attention that is at least 78% sparse can have little effect on performance if applied at later transformer layers, but that applying sparsity throughout the network reduces performance significantly. Second, we vary the degree of sparsity for three patterns supported by previous work, and find that connections to neighbouring tokens are the most significant. Finally, we treat sparsity as an optimizable parameter, and present an algorithm to learn degrees of neighboring connections that gives a fine-grained control over the accuracy-sparsity trade-off while approaching the performance of existing methods.
Are Representations Built from the Ground Up? An Empirical Examination of Local Composition in Language Models
Oct 07, 2022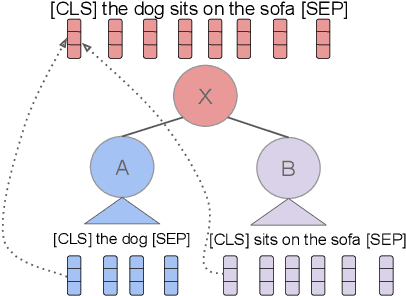
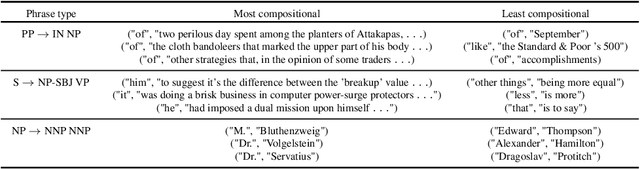
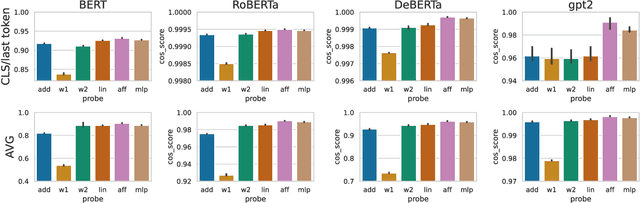
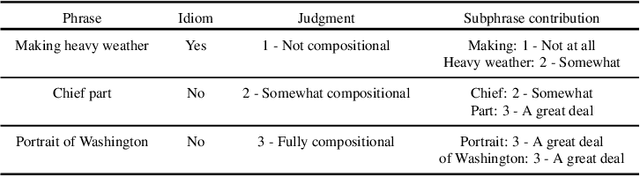
Compositionality, the phenomenon where the meaning of a phrase can be derived from its constituent parts, is a hallmark of human language. At the same time, many phrases are non-compositional, carrying a meaning beyond that of each part in isolation. Representing both of these types of phrases is critical for language understanding, but it is an open question whether modern language models (LMs) learn to do so; in this work we examine this question. We first formulate a problem of predicting the LM-internal representations of longer phrases given those of their constituents. We find that the representation of a parent phrase can be predicted with some accuracy given an affine transformation of its children. While we would expect the predictive accuracy to correlate with human judgments of semantic compositionality, we find this is largely not the case, indicating that LMs may not accurately distinguish between compositional and non-compositional phrases. We perform a variety of analyses, shedding light on when different varieties of LMs do and do not generate compositional representations, and discuss implications for future modeling work.
PCAE: A Framework of Plug-in Conditional Auto-Encoder for Controllable Text Generation
Oct 07, 2022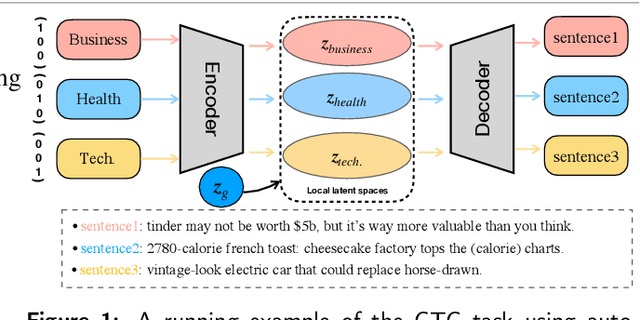
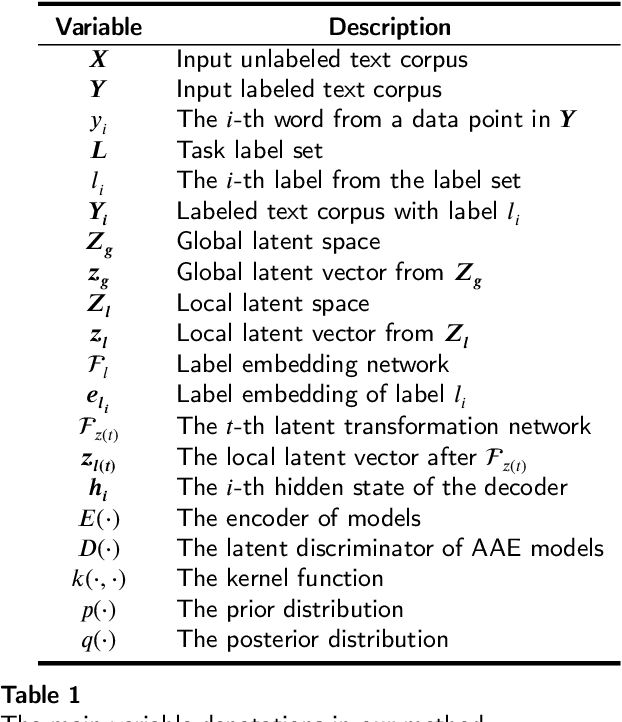
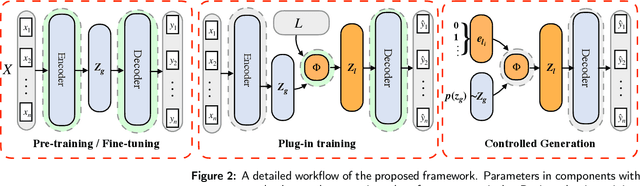

Controllable text generation has taken a gigantic step forward these days. Yet existing methods are either constrained in a one-off pattern or not efficient enough for receiving multiple conditions at every generation stage. We propose a model-agnostic framework Plug-in Conditional Auto-Encoder for Controllable Text Generation (PCAE) towards flexible and semi-supervised text generation. Our framework is "plug-and-play" with partial parameters to be fine-tuned in the pre-trained model (less than a half). Crucial to the success of PCAE is the proposed broadcasting label fusion network for navigating the global latent code to a specified local and confined space. Visualization of the local latent prior well confirms the primary devotion in hidden space of the proposed model. Moreover, extensive experiments across five related generation tasks (from 2 conditions up to 10 conditions) on both RNN- based and pre-trained BART [26] based auto-encoders reveal the high capability of PCAE, which enables generation that is highly manipulable, syntactically diverse and time-saving with minimum labeled samples. We will release our code at https://github.com/ImKeTT/pcae.
An Embarrassingly Simple Approach for Intellectual Property Rights Protection on Recurrent Neural Networks
Oct 04, 2022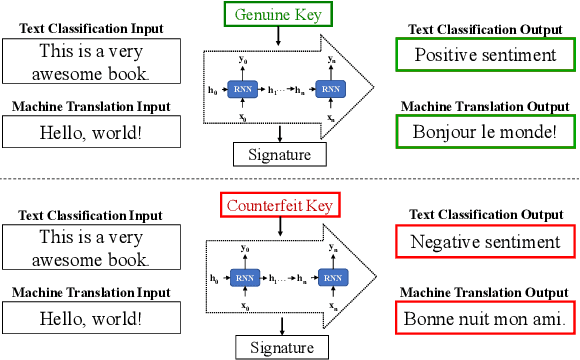
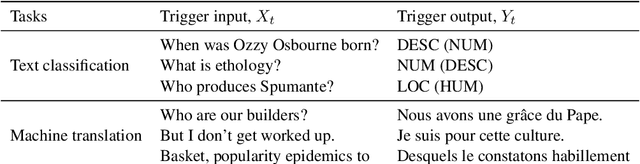
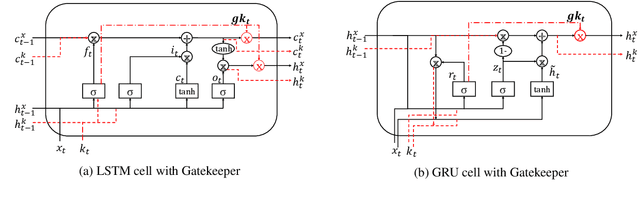
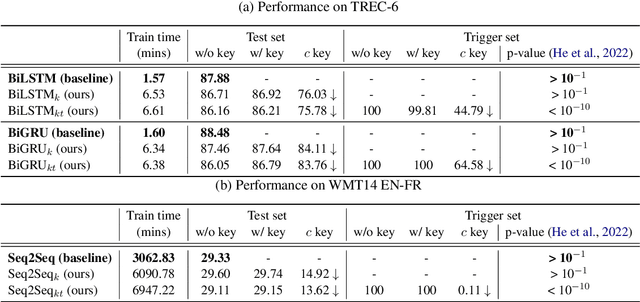
Capitalise on deep learning models, offering Natural Language Processing (NLP) solutions as a part of the Machine Learning as a Service (MLaaS) has generated handsome revenues. At the same time, it is known that the creation of these lucrative deep models is non-trivial. Therefore, protecting these inventions intellectual property rights (IPR) from being abused, stolen and plagiarized is vital. This paper proposes a practical approach for the IPR protection on recurrent neural networks (RNN) without all the bells and whistles of existing IPR solutions. Particularly, we introduce the Gatekeeper concept that resembles the recurrent nature in RNN architecture to embed keys. Also, we design the model training scheme in a way such that the protected RNN model will retain its original performance iff a genuine key is presented. Extensive experiments showed that our protection scheme is robust and effective against ambiguity and removal attacks in both white-box and black-box protection schemes on different RNN variants. Code is available at https://github.com/zhiqin1998/RecurrentIPR
SecureFedYJ: a safe feature Gaussianization protocol for Federated Learning
Oct 04, 2022
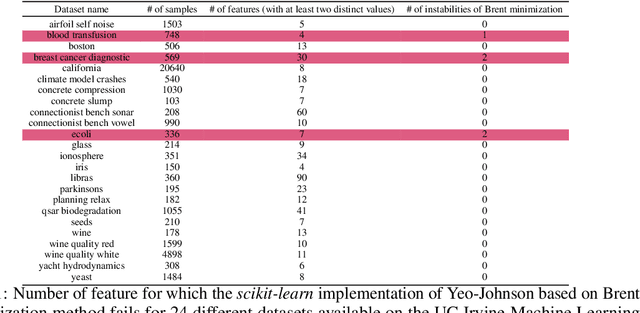
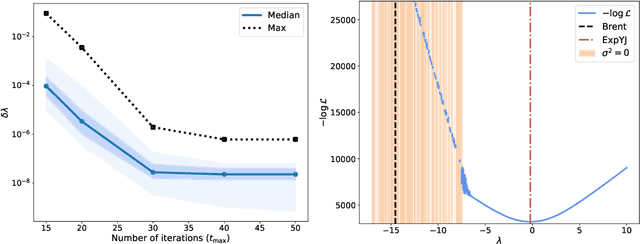
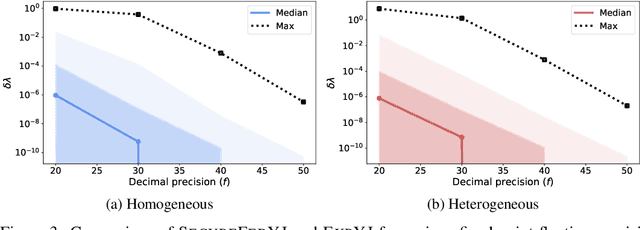
The Yeo-Johnson (YJ) transformation is a standard parametrized per-feature unidimensional transformation often used to Gaussianize features in machine learning. In this paper, we investigate the problem of applying the YJ transformation in a cross-silo Federated Learning setting under privacy constraints. For the first time, we prove that the YJ negative log-likelihood is in fact convex, which allows us to optimize it with exponential search. We numerically show that the resulting algorithm is more stable than the state-of-the-art approach based on the Brent minimization method. Building on this simple algorithm and Secure Multiparty Computation routines, we propose SecureFedYJ, a federated algorithm that performs a pooled-equivalent YJ transformation without leaking more information than the final fitted parameters do. Quantitative experiments on real data demonstrate that, in addition to being secure, our approach reliably normalizes features across silos as well as if data were pooled, making it a viable approach for safe federated feature Gaussianization.
Positive Pair Distillation Considered Harmful: Continual Meta Metric Learning for Lifelong Object Re-Identification
Oct 04, 2022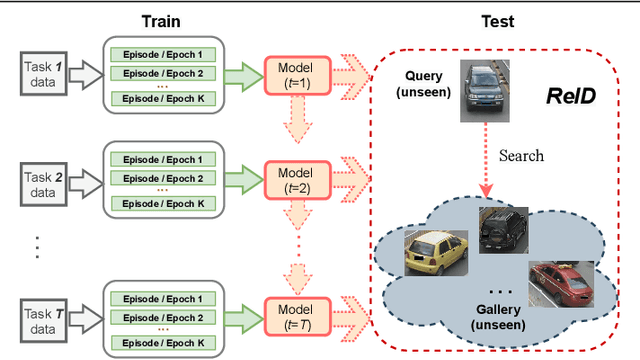

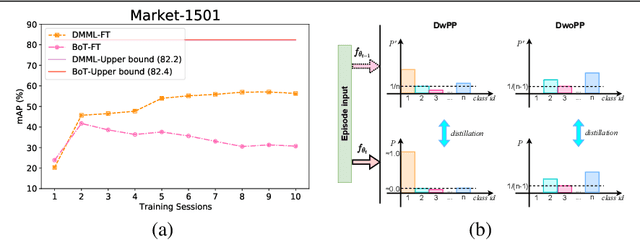

Lifelong object re-identification incrementally learns from a stream of re-identification tasks. The objective is to learn a representation that can be applied to all tasks and that generalizes to previously unseen re-identification tasks. The main challenge is that at inference time the representation must generalize to previously unseen identities. To address this problem, we apply continual meta metric learning to lifelong object re-identification. To prevent forgetting of previous tasks, we use knowledge distillation and explore the roles of positive and negative pairs. Based on our observation that the distillation and metric losses are antagonistic, we propose to remove positive pairs from distillation to robustify model updates. Our method, called Distillation without Positive Pairs (DwoPP), is evaluated on extensive intra-domain experiments on person and vehicle re-identification datasets, as well as inter-domain experiments on the LReID benchmark. Our experiments demonstrate that DwoPP significantly outperforms the state-of-the-art. The code is here: https://github.com/wangkai930418/DwoPP_code
Comparison of Object Detection Algorithms for Street-level Objects
Aug 24, 2022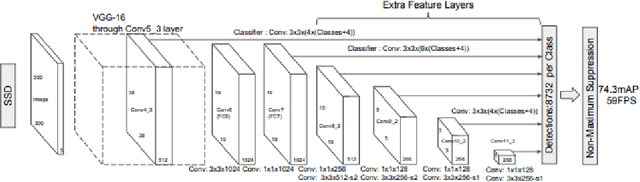
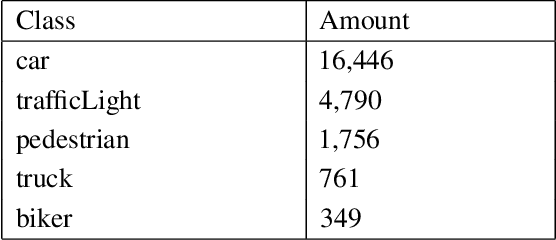
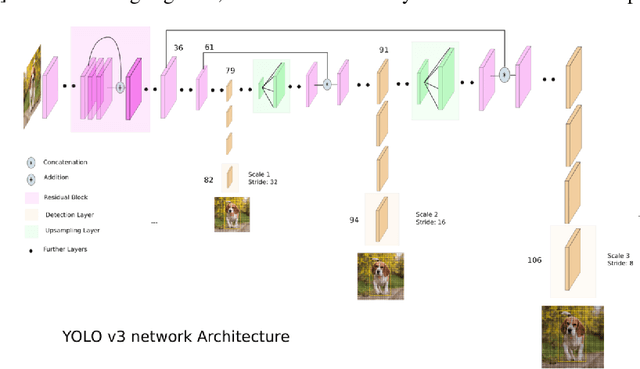
Object detection for street-level objects can be applied to various use cases, from car and traffic detection to the self-driving car system. Therefore, finding the best object detection algorithm is essential to apply it effectively. Many object detection algorithms have been released, and many have compared object detection algorithms, but few have compared the latest algorithms, such as YOLOv5, primarily which focus on street-level objects. This paper compares various one-stage detector algorithms; SSD MobileNetv2 FPN-lite 320x320, YOLOv3, YOLOv4, YOLOv5l, and YOLOv5s for street-level object detection within real-time images. The experiment utilizes a modified Udacity Self Driving Car Dataset with 3,169 images. Dataset is split into train, validation, and test; Then, it is preprocessed and augmented using rescaling, hue shifting, and noise. Each algorithm is then trained and evaluated. Based on the experiments, the algorithms have produced decent results according to the inference time and the values of their precision, recall, F1-Score, and Mean Average Precision (mAP). The results also shows that YOLOv5l outperforms the other algorithms in terms of accuracy with a mAP@.5 of 0.593, MobileNetv2 FPN-lite has the fastest inference time among the others with only 3.20ms inference time. It is also found that YOLOv5s is the most efficient, with it having a YOLOv5l accuracy and a speed almost as quick as the MobileNetv2 FPN-lite. This shows that various algorithm are suitable for street-level object detection and viable enough to be used in self-driving car.