 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Object Detection Algorithms for Street-level Objects
Paper and Code
Aug 24, 2022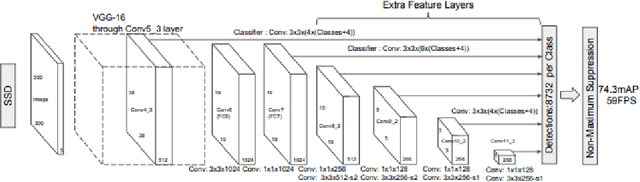
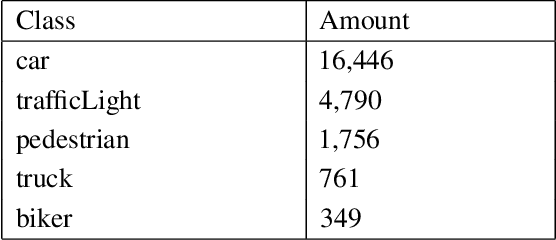
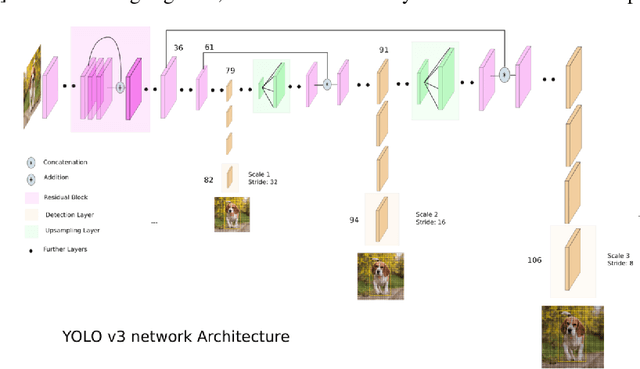
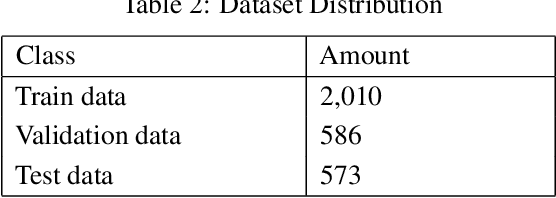
Object detection for street-level objects can be applied to various use cases, from car and traffic detection to the self-driving car system. Therefore, finding the best object detection algorithm is essential to apply it effectively. Many object detection algorithms have been released, and many have compared object detection algorithms, but few have compared the latest algorithms, such as YOLOv5, primarily which focus on street-level objects. This paper compares various one-stage detector algorithms; SSD MobileNetv2 FPN-lite 320x320, YOLOv3, YOLOv4, YOLOv5l, and YOLOv5s for street-level object detection within real-time images. The experiment utilizes a modified Udacity Self Driving Car Dataset with 3,169 images. Dataset is split into train, validation, and test; Then, it is preprocessed and augmented using rescaling, hue shifting, and noise. Each algorithm is then trained and evaluated. Based on the experiments, the algorithms have produced decent results according to the inference time and the values of their precision, recall, F1-Score, and Mean Average Precision (mAP). The results also shows that YOLOv5l outperforms the other algorithms in terms of accuracy with a mAP@.5 of 0.593, MobileNetv2 FPN-lite has the fastest inference time among the others with only 3.20ms inference time. It is also found that YOLOv5s is the most efficient, with it having a YOLOv5l accuracy and a speed almost as quick as the MobileNetv2 FPN-lite. This shows that various algorithm are suitable for street-level object detection and viable enough to be used in self-driving car.