 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
Unsupervised Domain Adaptation with Histogram-gated Image Translation for Delayered IC Image Analysis
Sep 27, 2022
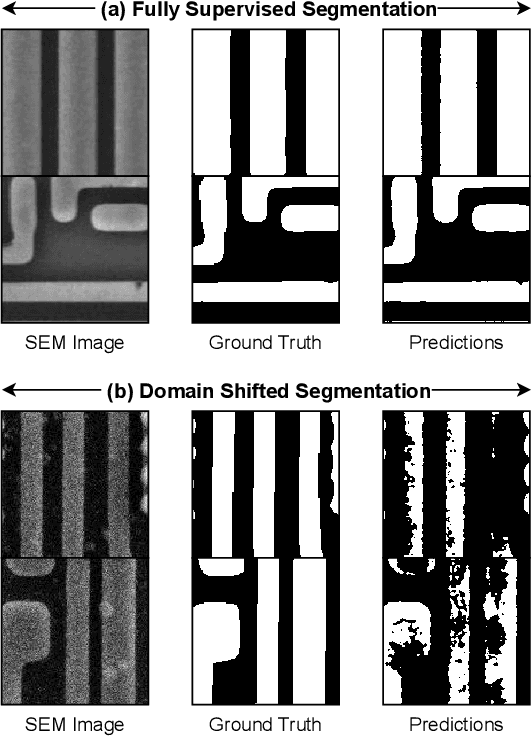
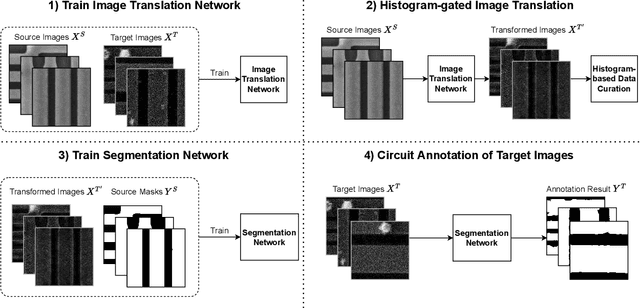
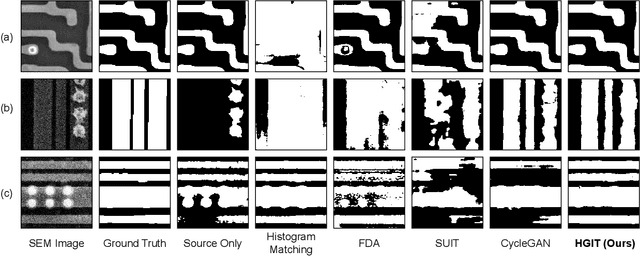
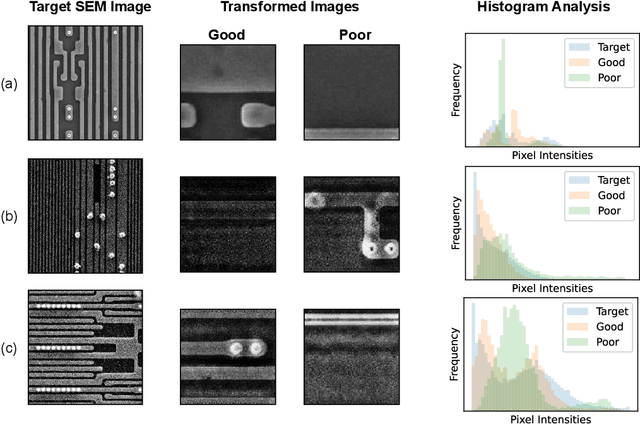
Deep learning has achieved great success in the challenging circuit annotation task by employing Convolutional Neural Networks (CNN) for the segmentation of circuit structures. The deep learning approaches require a large amount of manually annotated training data to achieve a good performance, which could cause a degradation in performance if a deep learning model trained on a given dataset is applied to a different dataset. This is commonly known as the domain shift problem for circuit annotation, which stems from the possibly large variations in distribution across different image datasets. The different image datasets could be obtained from different devices or different layers within a single device. To address the domain shift problem, we propose Histogram-gated Image Translation (HGIT), an unsupervised domain adaptation framework which transforms images from a given source dataset to the domain of a target dataset, and utilize the transformed images for training a segmentation network. Specifically, our HGIT performs generative adversarial network (GAN)-based image translation and utilizes histogram statistics for data curation. Experiments were conducted on a single labeled source dataset adapted to three different target datasets (without labels for training) and the segmentation performance was evaluated for each target dataset. We have demonstrated that our method achieves the best performance compared to the reported domain adaptation techniques, and is also reasonably close to the fully supervised benchmark.
DEA-Net: Single image dehazing based on detail-enhanced convolution and content-guided attention
Jan 12, 2023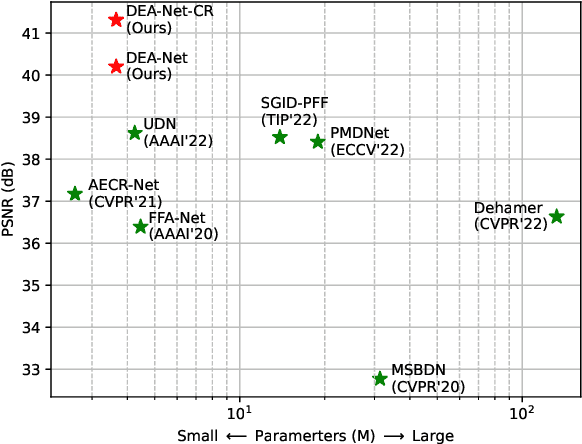
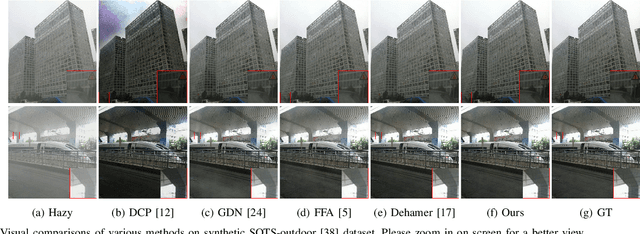
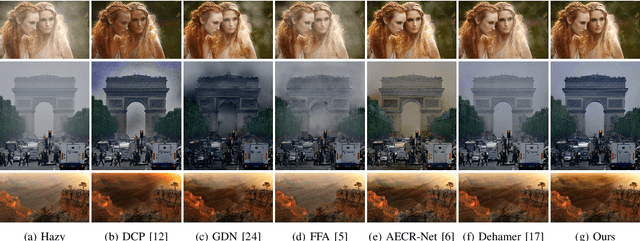
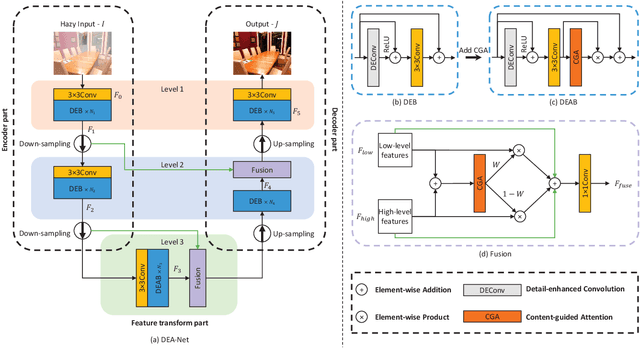
Single image dehazing is a challenging ill-posed problem which estimates latent haze-free images from observed hazy images. Some existing deep learning based methods are devoted to improving the model performance via increasing the depth or width of convolution. The learning ability of convolutional neural network (CNN) structure is still under-explored. In this paper, a detail-enhanced attention block (DEAB) consisting of the detail-enhanced convolution (DEConv) and the content-guided attention (CGA) is proposed to boost the feature learning for improving the dehazing performance. Specifically, the DEConv integrates prior information into normal convolution layer to enhance the representation and generalization capacity. Then by using the re-parameterization technique, DEConv is equivalently converted into a vanilla convolution with NO extra parameters and computational cost. By assigning unique spatial importance map (SIM) to every channel, CGA can attend more useful information encoded in features. In addition, a CGA-based mixup fusion scheme is presented to effectively fuse the features and aid the gradient flow. By combining above mentioned components, we propose our detail-enhanced attention network (DEA-Net) for recovering high-quality haze-free images. Extensive experimental results demonstrate the effectiveness of our DEA-Net, outperforming the state-of-the-art (SOTA) methods by boosting the PSNR index over 41 dB with only 3.653 M parameters. The source code of our DEA-Net will be made available at https://github.com/cecret3350/DEA-Net.
Switching to Discriminative Image Captioning by Relieving a Bottleneck of Reinforcement Learning
Dec 06, 2022Discriminativeness is a desirable feature of image captions: captions should describe the characteristic details of input images. However, recent high-performing captioning models, which are trained with reinforcement learning (RL), tend to generate overly generic captions despite their high performance in various other criteria. First, we investigate the cause of the unexpectedly low discriminativeness and show that RL has a deeply rooted side effect of limiting the output words to high-frequency words. The limited vocabulary is a severe bottleneck for discriminativeness as it is difficult for a model to describe the details beyond its vocabulary. Then, based on this identification of the bottleneck, we drastically recast discriminative image captioning as a much simpler task of encouraging low-frequency word generation. Hinted by long-tail classification and debiasing methods, we propose methods that easily switch off-the-shelf RL models to discriminativeness-aware models with only a single-epoch fine-tuning on the part of the parameters. Extensive experiments demonstrate that our methods significantly enhance the discriminativeness of off-the-shelf RL models and even outperform previous discriminativeness-aware methods with much smaller computational costs. Detailed analysis and human evaluation also verify that our methods boost the discriminativeness without sacrificing the overall quality of captions.
Phase Aberration Correction without Reference Data: An Adaptive Mixed Loss Deep Learning Approach
Mar 10, 2023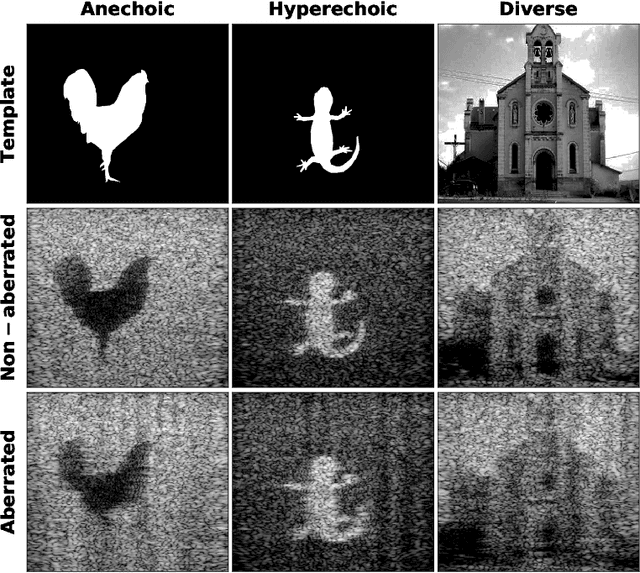
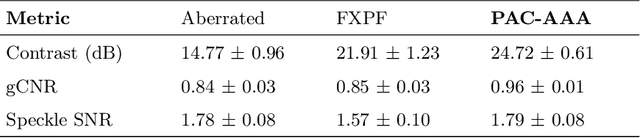
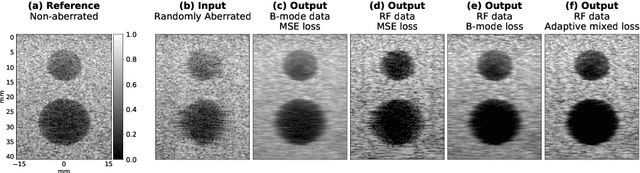
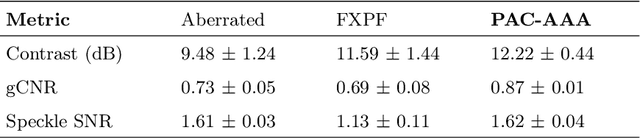
Phase aberration is one of the primary sources of image quality degradation in ultrasound, which is induced by spatial variations in sound speed across the heterogeneous medium. This effect disrupts transmitted waves and prevents coherent summation of echo signals, resulting in suboptimal image quality. In real experiments, obtaining non-aberrated ground truths can be extremely challenging, if not infeasible. It hinders the performance of deep learning-based phase aberration correction techniques due to sole reliance on simulated data and the presence of domain shift between simulated and experimental data. Here, for the first time, we propose a deep learning-based method that does not require reference data to compensate for the phase aberration effect. We train a network wherein both input and target output are randomly aberrated radio frequency (RF) data. Moreover, we demonstrate that a conventional loss function such as mean square error is inadequate for training the network to achieve optimal performance. Instead, we propose an adaptive mixed loss function that employs both B-mode and RF data, resulting in more efficient convergence and enhanced performance. Source code is available at \url{http://code.sonography.ai}.
You Only Train Once: Learning a General Anomaly Enhancement Network with Random Masks for Hyperspectral Anomaly Detection
Mar 31, 2023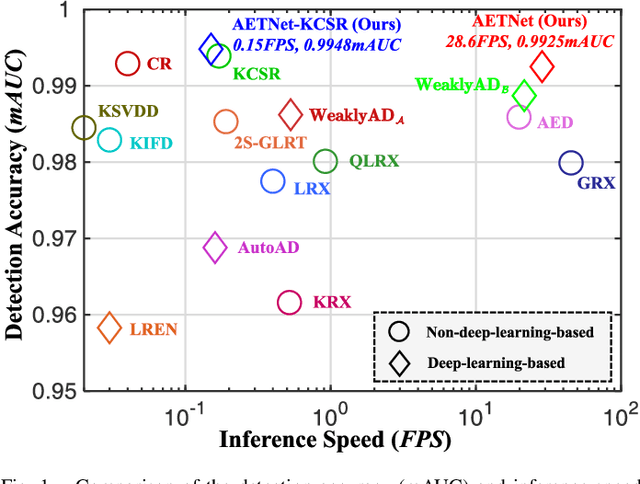
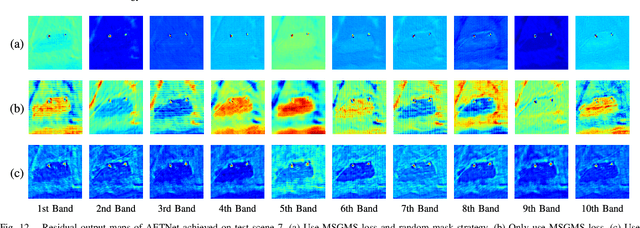
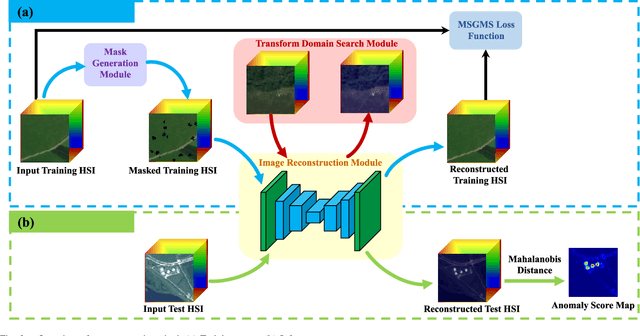
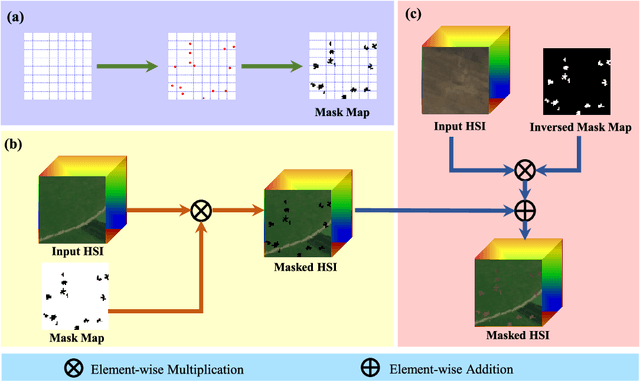
In this paper, we introduce a new approach to address the challenge of generalization in hyperspectral anomaly detection (AD). Our method eliminates the need for adjusting parameters or retraining on new test scenes as required by most existing methods. Employing an image-level training paradigm, we achieve a general anomaly enhancement network for hyperspectral AD that only needs to be trained once. Trained on a set of anomaly-free hyperspectral images with random masks, our network can learn the spatial context characteristics between anomalies and background in an unsupervised way. Additionally, a plug-and-play model selection module is proposed to search for a spatial-spectral transform domain that is more suitable for AD task than the original data. To establish a unified benchmark to comprehensively evaluate our method and existing methods, we develop a large-scale hyperspectral AD dataset (HAD100) that includes 100 real test scenes with diverse anomaly targets. In comparison experiments, we combine our network with a parameter-free detector and achieve the optimal balance between detection accuracy and inference speed among state-of-the-art AD methods. Experimental results also show that our method still achieves competitive performance when the training and test set are captured by different sensor devices. Our code is available at https://github.com/ZhaoxuLi123/AETNet.
UniCT DMI Solution for 3rd COV19D Competition on COVID-19 Detection through attention-based CNN for CT Scan
Mar 22, 2023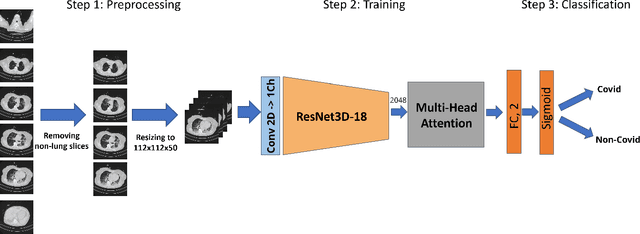
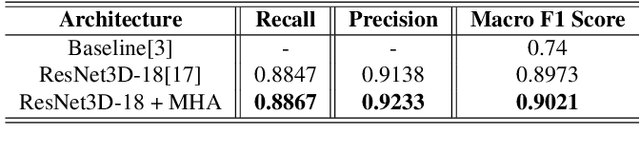
This paper presents our solution for the first challenge of the 3rd Covid-19 competition, which is part of the "AI-enabled Medical Image Analysis Workshop" organized by IEEE International Conference on Acoustic, Speech and Signal Processing (ICASSP) 2023. Our proposed solution is based on a Resnet as a backbone network with the addition of attention mechanisms. The Resnet provides an effective feature extractor for the classification task, while the attention mechanisms improve the model's ability to focus on important regions of interest within the images. We conducted extensive experiments on the provided dataset and achieved promising results. Our proposed approach has the potential to assist in the accurate diagnosis of Covid-19 from chest computed tomography images, which can aid in the early detection and management of the disease.
The First Comprehensive Dataset with Multiple Distortion Types for Visual Just-Noticeable Differences
Mar 08, 2023
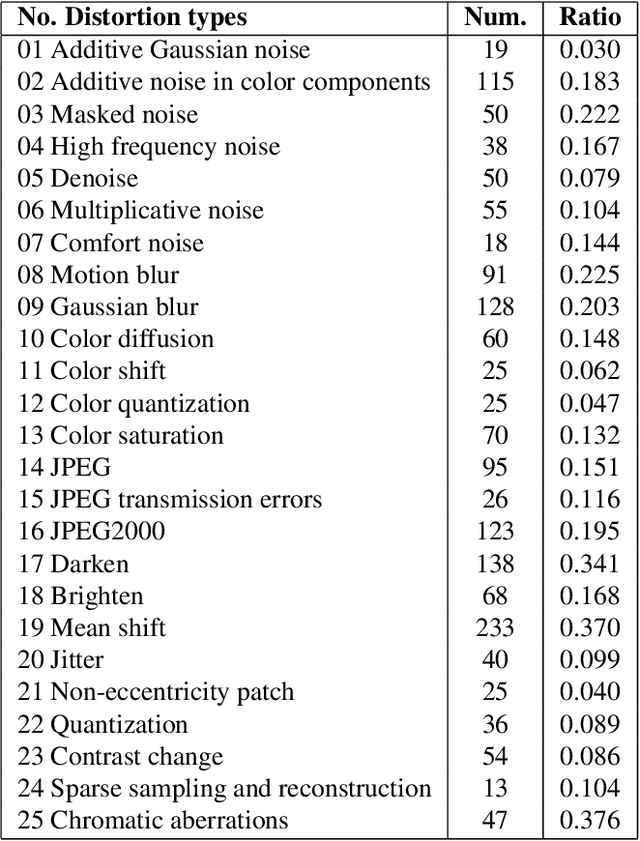
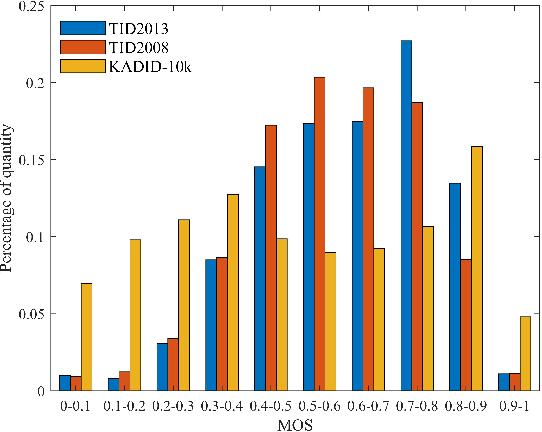
Recently, with the development of deep learning, a number of Just Noticeable Difference (JND) datasets have been built for JND modeling. However, all the existing JND datasets only label the JND points based on the level of compression distortion. Hence, JND models learned from such datasets can only be used for image/video compression. As known, JND is a major characteristic of the human visual system (HVS), which reflects the maximum visual distortion that the HVS can tolerate. Hence, a generalized JND modeling should take more kinds of distortion types into account. To benefit JND modeling, this work establishes a generalized JND dataset with a coarse-to-fine JND selection, which contains 106 source images and 1,642 JND maps, covering 25 distortion types. To this end, we proposed a coarse JND candidate selection scheme to select the distorted images from the existing Image Quality Assessment (IQA) datasets as JND candidates instead of generating JND maps ourselves. Then, a fine JND selection is carried out on the JND candidates with a crowdsourced subjective assessment.
Corner Detection Based on Multi-directional Gabor Filters with Multi-scales
Mar 08, 2023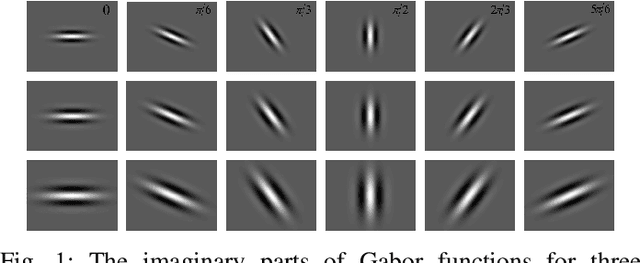
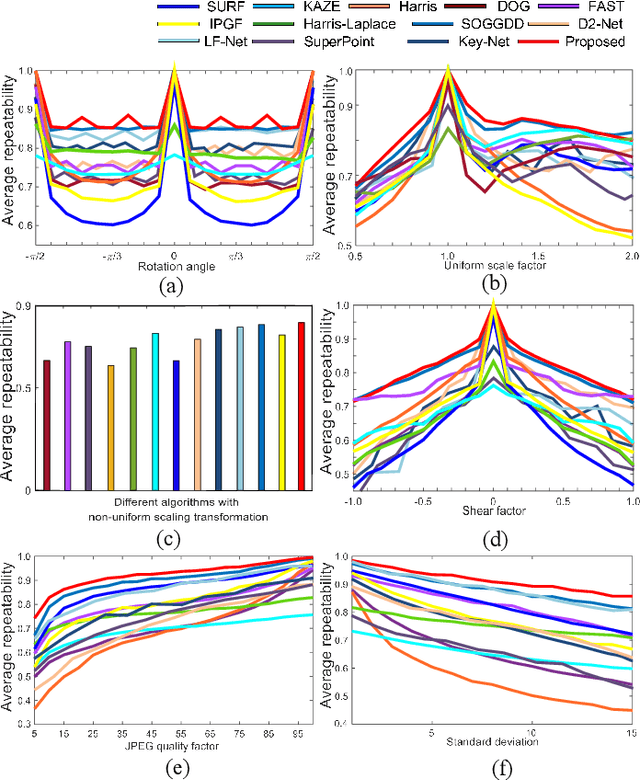
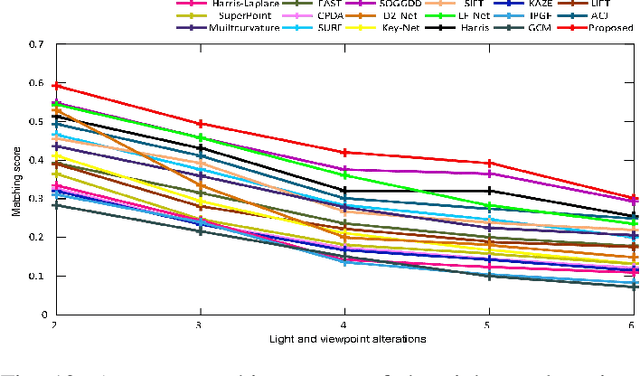
Gabor wavelet is an essential tool for image analysis and computer vision tasks. Local structure tensors with multiple scales are widely used in local feature extraction. Our research indicates that the current corner detection method based on Gabor wavelets can not effectively apply to complex scenes. In this work, the capability of the Gabor function to discriminate the intensity changes of step edges, L-shaped corners, Y-shaped or T-shaped corners, X-shaped corners, and star-shaped corners are investigated. The properties of Gabor wavelets to suppress affine image transformation are investigated and obtained. Many properties for edges and corners were discovered, which prompted us to propose a new corner extraction method. To fully use the structural information from the tuned Gabor filters, a novel multi-directional structure tensor is constructed for corner detection, and a multi-scale corner measurement function is proposed to remove false candidate corners. Furthermore, we compare the proposed method with twelve current state-of-the-art methods, which exhibit optimal performance and practical application to 3D reconstruction with good application potential.
4D iRIOM: 4D Imaging Radar Inertial Odometry and Mapping
Apr 03, 2023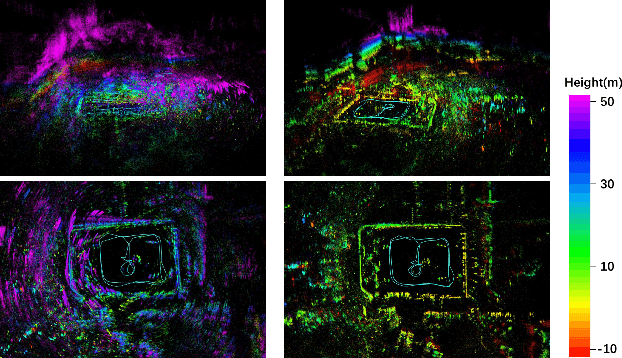
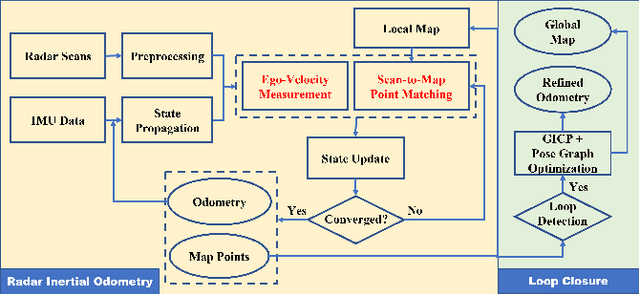
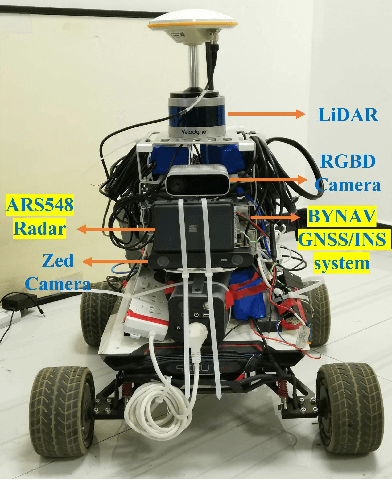
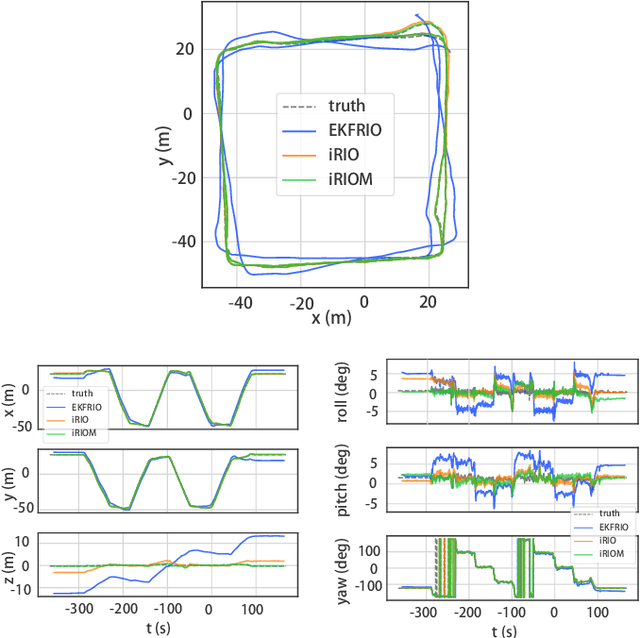
Millimeter wave radar can measure distances, directions, and Doppler velocity for objects in harsh conditions such as fog. The 4D imaging radar with both vertical and horizontal data resembling an image can also measure objects' height. Previous studies have used 3D radars for ego-motion estimation. But few methods leveraged the rich data of imaging radars, and they usually omitted the mapping aspect, thus leading to inferior odometry accuracy. This paper presents a real-time imaging radar inertial odometry and mapping method, iRIOM, based on the submap concept. To deal with moving objects and multipath reflections, we use the graduated non-convexity method to robustly and efficiently estimate ego-velocity from a single scan. To measure the agreement between sparse non-repetitive radar scan points and submap points, the distribution-to-multi-distribution distance for matches is adopted. The ego-velocity, scan-to-submap matches are fused with the 6D inertial data by an iterative extended Kalman filter to get the platform's 3D position and orientation. A loop closure module is also developed to curb the odometry module's drift. To our knowledge, iRIOM based on the two modules is the first 4D radar inertial SLAM system. On our and third-party data, we show iRIOM's favorable odometry accuracy and mapping consistency against the FastLIO-SLAM and the EKFRIO. Also, the ablation study reveal the benefit of inertial data versus the constant velocity model, and scan-to-submap matching versus scan-to-scan matching.
FinderNet: A Data Augmentation Free Canonicalization aided Loop Detection and Closure technique for Point clouds in 6-DOF separation
Apr 03, 2023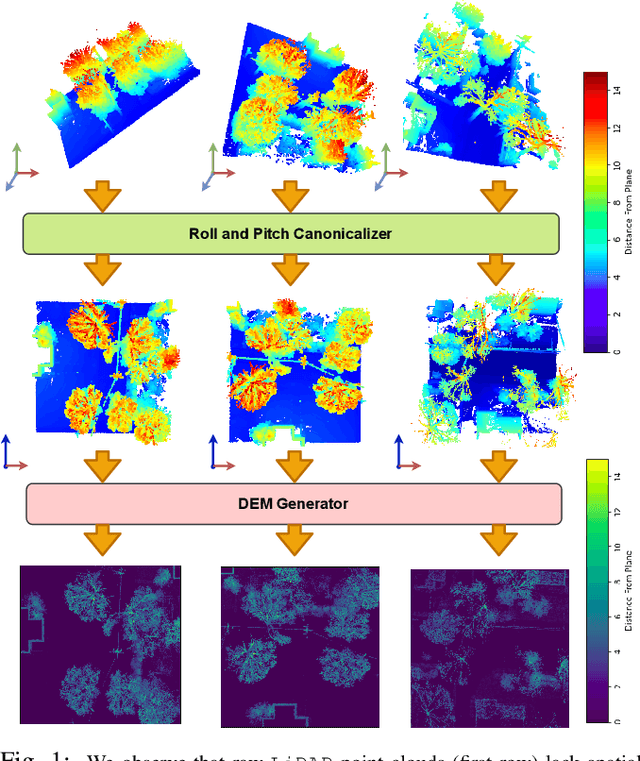
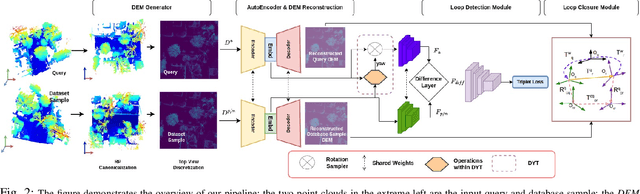
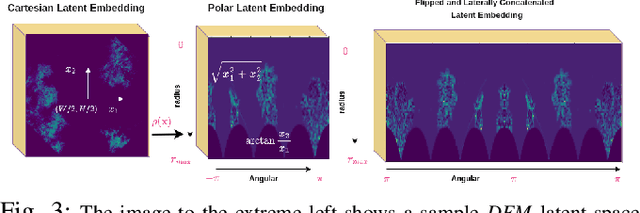
We focus on the problem of LiDAR point cloud based loop detection (or Finding) and closure (LDC) in a multi-agent setting. State-of-the-art (SOTA) techniques directly generate learned embeddings of a given point cloud, require large data transfers, and are not robust to wide variations in 6 Degrees-of-Freedom (DOF) viewpoint. Moreover, absence of strong priors in an unstructured point cloud leads to highly inaccurate LDC. In this original approach, we propose independent roll and pitch canonicalization of the point clouds using a common dominant ground plane. Discretization of the canonicalized point cloud along the axis perpendicular to the ground plane leads to an image similar to Digital Elevation Maps (DEMs), which exposes strong spatial priors in the scene. Our experiments show that LDC based on learnt embeddings of such DEMs is not only data efficient but also significantly more robust, and generalizable than the current SOTA. We report significant performance gain in terms of Average Precision for loop detection and absolute translation/rotation error for relative pose estimation (or loop closure) on Kitti, GPR and Oxford Robot Car over multiple SOTA LDC methods. Our encoder technique allows to compress the original point cloud by over 830 times. To further test the robustness of our technique we create and opensource a custom dataset called Lidar-UrbanFly Dataset (LUF) which consists of point clouds obtained from a LiDAR mounted on a quadrotor.