 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgexbench: Tracking Agents Productivity Scaling with Profession-Aligned Real-World Evaluations
Jun 16, 2025
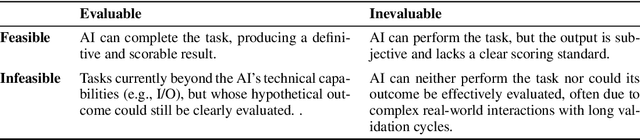

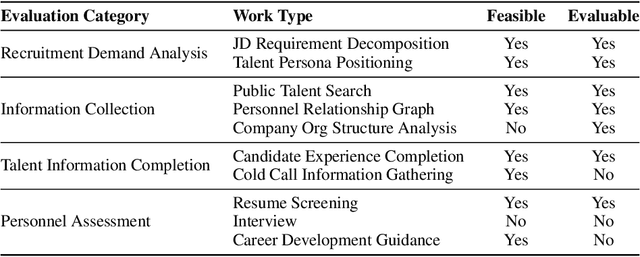
We introduce xbench, a dynamic, profession-aligned evaluation suite designed to bridge the gap between AI agent capabilities and real-world productivity. While existing benchmarks often focus on isolated technical skills, they may not accurately reflect the economic value agents deliver in professional settings. To address this, xbench targets commercially significant domains with evaluation tasks defined by industry professionals. Our framework creates metrics that strongly correlate with productivity value, enables prediction of Technology-Market Fit (TMF), and facilitates tracking of product capabilities over time. As our initial implementations, we present two benchmarks: Recruitment and Marketing. For Recruitment, we collect 50 tasks from real-world headhunting business scenarios to evaluate agents' abilities in company mapping, information retrieval, and talent sourcing. For Marketing, we assess agents' ability to match influencers with advertiser needs, evaluating their performance across 50 advertiser requirements using a curated pool of 836 candidate influencers. We present initial evaluation results for leading contemporary agents, establishing a baseline for these professional domains. Our continuously updated evalsets and evaluations are available at https://xbench.org.
WebPilot: A Versatile and Autonomous Multi-Agent System for Web Task Execution with Strategic Exploration
Aug 28, 2024



LLM-based autonomous agents often fail to execute complex web tasks that require dynamic interaction due to the inherent uncertainty and complexity of these environments. Existing LLM-based web agents typically rely on rigid, expert-designed policies specific to certain states and actions, which lack the flexibility and generalizability needed to adapt to unseen tasks. In contrast, humans excel by exploring unknowns, continuously adapting strategies, and resolving ambiguities through exploration. To emulate human-like adaptability, web agents need strategic exploration and complex decision-making. Monte Carlo Tree Search (MCTS) is well-suited for this, but classical MCTS struggles with vast action spaces, unpredictable state transitions, and incomplete information in web tasks. In light of this, we develop WebPilot, a multi-agent system with a dual optimization strategy that improves MCTS to better handle complex web environments. Specifically, the Global Optimization phase involves generating a high-level plan by breaking down tasks into manageable subtasks and continuously refining this plan, thereby focusing the search process and mitigating the challenges posed by vast action spaces in classical MCTS. Subsequently, the Local Optimization phase executes each subtask using a tailored MCTS designed for complex environments, effectively addressing uncertainties and managing incomplete information. Experimental results on WebArena and MiniWoB++ demonstrate the effectiveness of WebPilot. Notably, on WebArena, WebPilot achieves SOTA performance with GPT-4, achieving a 93% relative increase in success rate over the concurrent tree search-based method. WebPilot marks a significant advancement in general autonomous agent capabilities, paving the way for more advanced and reliable decision-making in practical environments.
Transformation Decoupling Strategy based on Screw Theory for Deterministic Point Cloud Registration with Gravity Prior
Nov 02, 2023Point cloud registration is challenging in the presence of heavy outlier correspondences. This paper focuses on addressing the robust correspondence-based registration problem with gravity prior that often arises in practice. The gravity directions are typically obtained by inertial measurement units (IMUs) and can reduce the degree of freedom (DOF) of rotation from 3 to 1. We propose a novel transformation decoupling strategy by leveraging screw theory. This strategy decomposes the original 4-DOF problem into three sub-problems with 1-DOF, 2-DOF, and 1-DOF, respectively, thereby enhancing the computation efficiency. Specifically, the first 1-DOF represents the translation along the rotation axis and we propose an interval stabbing-based method to solve it. The second 2-DOF represents the pole which is an auxiliary variable in screw theory and we utilize a branch-and-bound method to solve it. The last 1-DOF represents the rotation angle and we propose a global voting method for its estimation. The proposed method sequentially solves three consensus maximization sub-problems, leading to efficient and deterministic registration. In particular, it can even handle the correspondence-free registration problem due to its significant robustness. Extensive experiments on both synthetic and real-world datasets demonstrate that our method is more efficient and robust than state-of-the-art methods, even when dealing with outlier rates exceeding 99%.