 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMDrive: Benchmarking Closed-Loop Cooperative Driving for End-to-End Multi-agent Systems
May 11, 2026Vehicle-to-Everything (V2X) communication has emerged as a promising paradigm for autonomous driving, enabling connected agents to share complementary perception information and negotiate with each other to benefit the final planning. Existing V2X benchmarks, however, fall short in two ways: (i) open-loop evaluations fail to capture the inherently closed-loop nature of driving, leading to evaluation gaps, and (ii) current closed-loop evaluations lack behavioral and interactive diversity to reflect real-world driving. Thus, it is still unclear the extent of benefits of multi-agent systems for closed-loop driving. In this paper, we introduce MDrive, a closed-loop cooperative driving benchmark comprising 225 scenarios grounded in both NHTSA pre-crash typologies and real-world V2X datasets. Our benchmark results demonstrate that multi-agent systems are generally better than single-agent counterparts. However, current multi-agent systems still face two important challenges: (i) perception sharing enhances perceptions, but doesn't always translate to better planning; (ii) negotiation improves planning performance but harms it in complex and dense traffic scenarios. MDrive further provides an open-source toolbox for scenario generation, Real2Sim conversion, and human-in-the-loop simulation. Together, MDrive establishes a reproducible foundation for evaluating and improving the generalization and robustness of cooperative driving systems.
CCTVBench: Contrastive Consistency Traffic VideoQA Benchmark for Multimodal LLMs
Apr 22, 2026Safety-critical traffic reasoning requires contrastive consistency: models must detect true hazards when an accident occurs, and reliably reject plausible-but-false hypotheses under near-identical counterfactual scenes. We present CCTVBench, a Contrastive Consistency Traffic VideoQA Benchmark built on paired real accident videos and world-model-generated counterfactual counterparts, together with minimally different, mutually exclusive hypothesis questions. CCTVBench enforces a single structured decision pattern over each video question quadruple and provides actionable diagnostics that decompose failures into positive omission, positive swap, negative hallucination, and mutual-exclusivity violation, while separating video versus question consistency. Experiments across open-source and proprietary video LLMs reveal a large and persistent gap between standard per-instance QA metrics and quadruple-level contrastive consistency, with unreliable none-of-the-above rejection as a key bottleneck. Finally, we introduce C-TCD, a contrastive decoding approach leveraging a semantically exclusive counterpart video as the contrast input at inference time, improving both instance-level QA and contrastive consistency.
SGTA: Scene-Graph Based Multi-Modal Traffic Agent for Video Understanding
Apr 04, 2026We present Scene-Graph Based Multi-Modal Traffic Agent (SGTA), a modular framework for traffic video understanding that combines structured scene graphs with multi-modal reasoning. It constructs a traffic scene graph from roadside videos using detection, tracking, and lane extraction, followed by tool-based reasoning over both symbolic graph queries and visual inputs. SGTA adopts ReAct to process interleaved reasoning traces from large language models with tool invocations, enabling interpretable decision-making for complex video questions. Experiments on selected TUMTraffic VideoQA dataset sample demonstrate that SGTA achieves competitive accuracy across multiple question types while providing transparent reasoning steps. These results highlight the potential of integrating structured scene representations with multi-modal agents for traffic video understanding.
SegRGB-X: General RGB-X Semantic Segmentation Model
Mar 30, 2026Semantic segmentation across arbitrary sensor modalities faces significant challenges due to diverse sensor characteristics, and the traditional configurations for this task result in redundant development efforts. We address these challenges by introducing a universal arbitrary-modal semantic segmentation framework that unifies segmentation across multiple modalities. Our approach features three key innovations: (1) the Modality-aware CLIP (MA-CLIP), which provides modality-specific scene understanding guidance through LoRA fine-tuning; (2) Modality-aligned Embeddings for capturing fine-grained features; and (3) the Domain-specific Refinement Module (DSRM) for dynamic feature adjustment. Evaluated on five diverse datasets with different complementary modalities (event, thermal, depth, polarization, and light field), our model surpasses specialized multi-modal methods and achieves state-of-the-art performance with a mIoU of 65.03%. The codes will be released upon acceptance.
Energy-Aware Imitation Learning for Steering Prediction Using Events and Frames
Mar 30, 2026In autonomous driving, relying solely on frame-based cameras can lead to inaccuracies caused by factors like long exposure times, high-speed motion, and challenging lighting conditions. To address these issues, we introduce a bio-inspired vision sensor known as the event camera. Unlike conventional cameras, event cameras capture sparse, asynchronous events that provide a complementary modality to mitigate these challenges. In this work, we propose an energy-aware imitation learning framework for steering prediction that leverages both events and frames. Specifically, we design an Energy-driven Cross-modality Fusion Module (ECFM) and an energy-aware decoder to produce reliable and safe predictions. Extensive experiments on two public real-world datasets, DDD20 and DRFuser, demonstrate that our method outperforms existing state-of-the-art (SOTA) approaches. The codes and trained models will be released upon acceptance.
Safety-Critical Learning for Long-Tail Events: The TUM Traffic Accident Dataset
Aug 20, 2025Even though a significant amount of work has been done to increase the safety of transportation networks, accidents still occur regularly. They must be understood as an unavoidable and sporadic outcome of traffic networks. We present the TUM Traffic Accident (TUMTraf-A) dataset, a collection of real-world highway accidents. It contains ten sequences of vehicle crashes at high-speed driving with 294,924 labeled 2D and 93,012 labeled 3D boxes and track IDs within 48,144 labeled frames recorded from four roadside cameras and LiDARs at 10 Hz. The dataset contains ten object classes and is provided in the OpenLABEL format. We propose Accid3nD, an accident detection model that combines a rule-based approach with a learning-based one. Experiments and ablation studies on our dataset show the robustness of our proposed method. The dataset, model, and code are available on our project website: https://tum-traffic-dataset.github.io/tumtraf-a.
Generative AI for Autonomous Driving: Frontiers and Opportunities
May 13, 2025Generative Artificial Intelligence (GenAI) constitutes a transformative technological wave that reconfigures industries through its unparalleled capabilities for content creation, reasoning, planning, and multimodal understanding. This revolutionary force offers the most promising path yet toward solving one of engineering's grandest challenges: achieving reliable, fully autonomous driving, particularly the pursuit of Level 5 autonomy. This survey delivers a comprehensive and critical synthesis of the emerging role of GenAI across the autonomous driving stack. We begin by distilling the principles and trade-offs of modern generative modeling, encompassing VAEs, GANs, Diffusion Models, and Large Language Models (LLMs). We then map their frontier applications in image, LiDAR, trajectory, occupancy, video generation as well as LLM-guided reasoning and decision making. We categorize practical applications, such as synthetic data workflows, end-to-end driving strategies, high-fidelity digital twin systems, smart transportation networks, and cross-domain transfer to embodied AI. We identify key obstacles and possibilities such as comprehensive generalization across rare cases, evaluation and safety checks, budget-limited implementation, regulatory compliance, ethical concerns, and environmental effects, while proposing research plans across theoretical assurances, trust metrics, transport integration, and socio-technical influence. By unifying these threads, the survey provides a forward-looking reference for researchers, engineers, and policymakers navigating the convergence of generative AI and advanced autonomous mobility. An actively maintained repository of cited works is available at https://github.com/taco-group/GenAI4AD.
Towards Vision Zero: The Accid3nD Dataset
Mar 15, 2025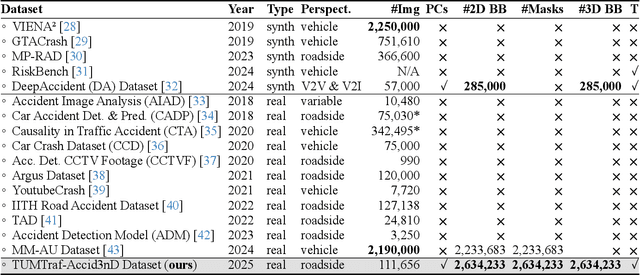
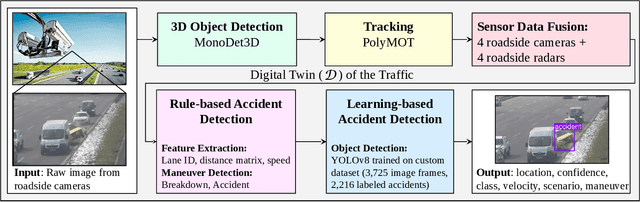


Even though a significant amount of work has been done to increase the safety of transportation networks, accidents still occur regularly. They must be understood as unavoidable and sporadic outcomes of traffic networks. No public dataset contains 3D annotations of real-world accidents recorded from roadside sensors. We present the Accid3nD dataset, a collection of real-world highway accidents in different weather and lighting conditions. It contains vehicle crashes at high-speed driving with 2,634,233 labeled 2D bounding boxes, instance masks, and 3D bounding boxes with track IDs. In total, the dataset contains 111,945 labeled frames recorded from four roadside cameras and LiDARs at 25 Hz. The dataset contains six object classes and is provided in the OpenLABEL format. We propose an accident detection model that combines a rule-based approach with a learning-based one. Experiments and ablation studies on our dataset show the robustness of our proposed method. The dataset, model, and code are available on our website: https://accident-dataset.github.io.
CoDa-4DGS: Dynamic Gaussian Splatting with Context and Deformation Awareness for Autonomous Driving
Mar 09, 2025



Dynamic scene rendering opens new avenues in autonomous driving by enabling closed-loop simulations with photorealistic data, which is crucial for validating end-to-end algorithms. However, the complex and highly dynamic nature of traffic environments presents significant challenges in accurately rendering these scenes. In this paper, we introduce a novel 4D Gaussian Splatting (4DGS) approach, which incorporates context and temporal deformation awareness to improve dynamic scene rendering. Specifically, we employ a 2D semantic segmentation foundation model to self-supervise the 4D semantic features of Gaussians, ensuring meaningful contextual embedding. Simultaneously, we track the temporal deformation of each Gaussian across adjacent frames. By aggregating and encoding both semantic and temporal deformation features, each Gaussian is equipped with cues for potential deformation compensation within 3D space, facilitating a more precise representation of dynamic scenes. Experimental results show that our method improves 4DGS's ability to capture fine details in dynamic scene rendering for autonomous driving and outperforms other self-supervised methods in 4D reconstruction and novel view synthesis. Furthermore, CoDa-4DGS deforms semantic features with each Gaussian, enabling broader applications.
TUMTraffic-VideoQA: A Benchmark for Unified Spatio-Temporal Video Understanding in Traffic Scenes
Feb 04, 2025



We present TUMTraffic-VideoQA, a novel dataset and benchmark designed for spatio-temporal video understanding in complex roadside traffic scenarios. The dataset comprises 1,000 videos, featuring 85,000 multiple-choice QA pairs, 2,300 object captioning, and 5,700 object grounding annotations, encompassing diverse real-world conditions such as adverse weather and traffic anomalies. By incorporating tuple-based spatio-temporal object expressions, TUMTraffic-VideoQA unifies three essential tasks-multiple-choice video question answering, referred object captioning, and spatio-temporal object grounding-within a cohesive evaluation framework. We further introduce the TUMTraffic-Qwen baseline model, enhanced with visual token sampling strategies, providing valuable insights into the challenges of fine-grained spatio-temporal reasoning. Extensive experiments demonstrate the dataset's complexity, highlight the limitations of existing models, and position TUMTraffic-VideoQA as a robust foundation for advancing research in intelligent transportation systems. The dataset and benchmark are publicly available to facilitate further exploration.