 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-cam Multi-map Visual Inertial Localization: System, Validation and Dataset
Dec 05, 2024



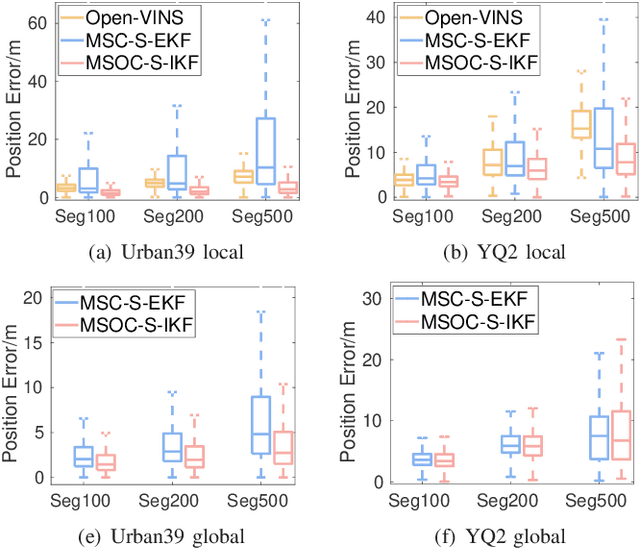
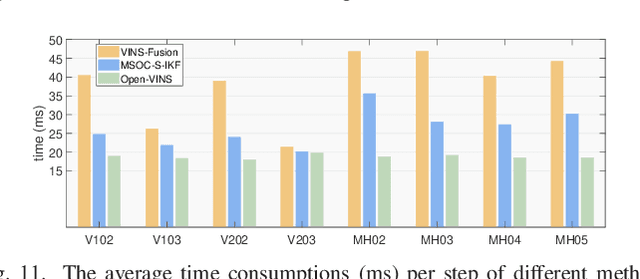
Map-based localization is crucial for the autonomous movement of robots as it provides real-time positional feedback. However, existing VINS and SLAM systems cannot be directly integrated into the robot's control loop. Although VINS offers high-frequency position estimates, it suffers from drift in long-term operation. And the drift-free trajectory output by SLAM is post-processed with loop correction, which is non-causal. In practical control, it is impossible to update the current pose with future information. Furthermore, existing SLAM evaluation systems measure accuracy after aligning the entire trajectory, which overlooks the transformation error between the odometry start frame and the ground truth frame. To address these issues, we propose a multi-cam multi-map visual inertial localization system, which provides real-time, causal and drift-free position feedback to the robot control loop. Additionally, we analyze the error composition of map-based localization systems and propose a set of evaluation metric suitable for measuring causal localization performance. To validate our system, we design a multi-camera IMU hardware setup and collect a long-term challenging campus dataset. Experimental results demonstrate the higher real-time localization accuracy of the proposed system. To foster community development, both the system and the dataset have been made open source https://github.com/zoeylove/Multi-cam-Multi-map-VILO/tree/main.
FEJ-VIRO: A Consistent First-Estimate Jacobian Visual-Inertial-Ranging Odometry
Jul 17, 2022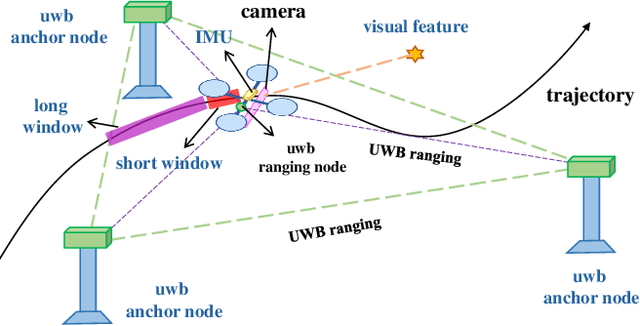
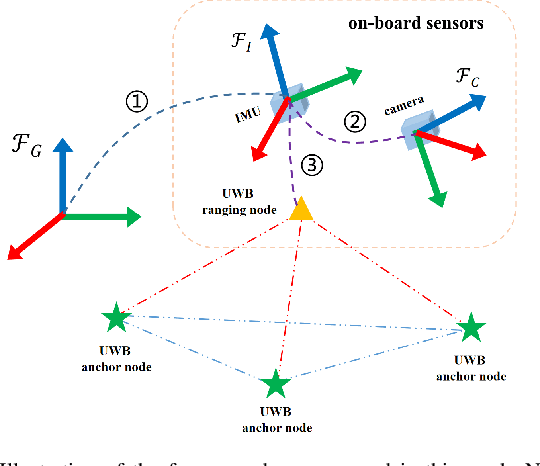
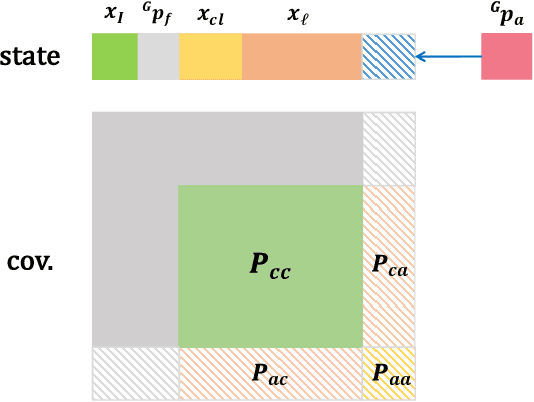
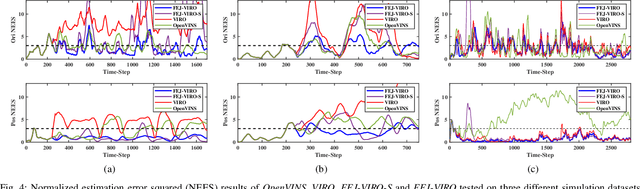
In recent years, Visual-Inertial Odometry (VIO) has achieved many significant progresses. However, VIO methods suffer from localization drift over long trajectories. In this paper, we propose a First-Estimates Jacobian Visual-Inertial-Ranging Odometry (FEJ-VIRO) to reduce the localization drifts of VIO by incorporating ultra-wideband (UWB) ranging measurements into the VIO framework \textit{consistently}. Considering that the initial positions of UWB anchors are usually unavailable, we propose a long-short window structure to initialize the UWB anchors' positions as well as the covariance for state augmentation. After initialization, the FEJ-VIRO estimates the UWB anchors' positions simultaneously along with the robot poses. We further analyze the observability of the visual-inertial-ranging estimators and proved that there are \textit{four} unobservable directions in the ideal case, while one of them vanishes in the actual case due to the gain of spurious information. Based on these analyses, we leverage the FEJ technique to enforce the unobservable directions, hence reducing inconsistency of the estimator. Finally, we validate our analysis and evaluate the proposed FEJ-VIRO with both simulation and real-world experiments.
Map-based Visual-Inertial Localization: Consistency and Complexity
Apr 26, 2022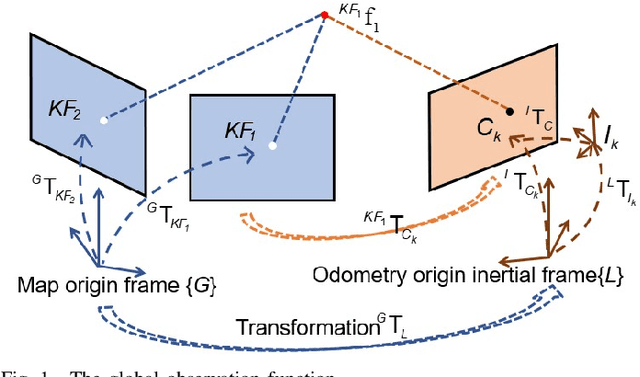
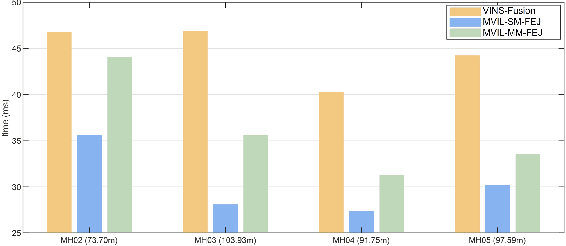
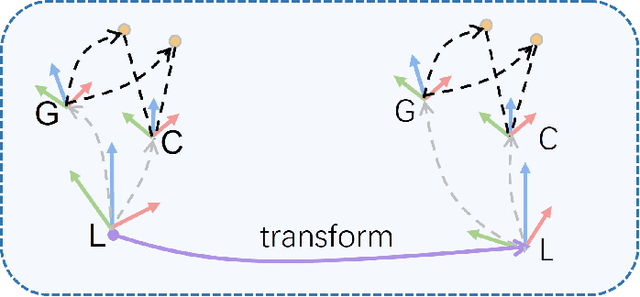
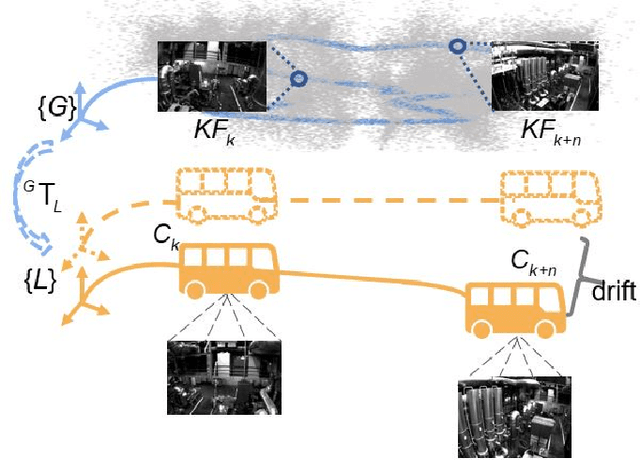
Drift-free localization is essential for autonomous vehicles. In this paper, we address the problem by proposing a filter-based framework, which integrates the visual-inertial odometry and the measurements of the features in the pre-built map. In this framework, the transformation between the odometry frame and the map frame is augmented into the state and estimated on the fly. Besides, we maintain only the keyframe poses in the map and employ Schmidt extended Kalman filter to update the state partially, so that the uncertainty of the map information can be consistently considered with low computational cost. Moreover, we theoretically demonstrate that the ever-changing linearization points of the estimated state can introduce spurious information to the augmented system and make the original four-dimensional unobservable subspace vanish, leading to inconsistent estimation in practice. To relieve this problem, we employ first-estimate Jacobian (FEJ) to maintain the correct observability properties of the augmented system. Furthermore, we introduce an observability-constrained updating method to compensate for the significant accumulated error after the long-term absence (can be 3 minutes and 1 km) of map-based measurements. Through simulations, the consistent estimation of our proposed algorithm is validated. Through real-world experiments, we demonstrate that our proposed algorithm runs successfully on four kinds of datasets with the lower computational cost (20% time-saving) and the better estimation accuracy (45% trajectory error reduction) compared with the baseline algorithm VINS-Fusion, whereas VINS-Fusion fails to give bounded localization performance on three of four datasets because of its inconsistent estimation.
Toward Consistent and Efficient Map-based Visual-inertial Localization: Theory Framework and Filter Design
Apr 26, 2022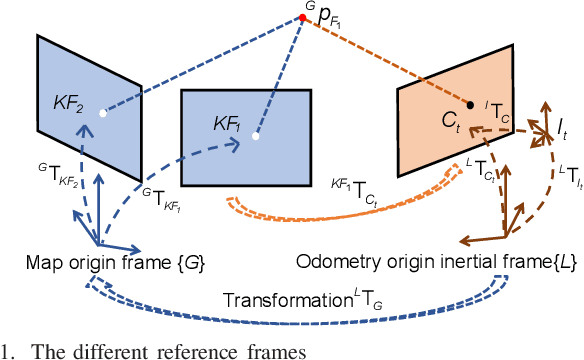
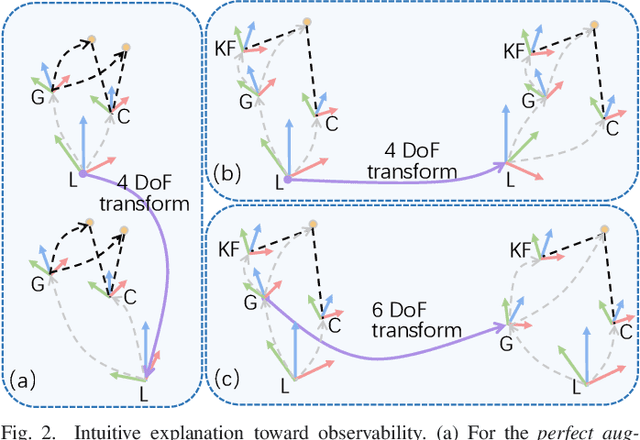
This paper focuses on designing a consistent and efficient filter for map-based visual-inertial localization. First, we propose a new Lie group with its algebra, based on which a novel invariant extended Kalman filter (invariant EKF) is designed. We theoretically prove that, when we do not consider the uncertainty of the map information, the proposed invariant EKF can naturally maintain the correct observability properties of the system. To consider the uncertainty of the map information, we introduce a Schmidt filter. With the Schmidt filter, the uncertainty of the map information can be taken into consideration to avoid over-confident estimation while the computation cost only increases linearly with the size of the map keyframes. In addition, we introduce an easily implemented observability-constrained technique because directly combining the invariant EKF with the Schmidt filter cannot maintain the correct observability properties of the system that considers the uncertainty of the map information. Finally, we validate our proposed system's high consistency, accuracy, and efficiency via extensive simulations and real-world experiments.
A Right Invariant Extended Kalman Filter for Object based SLAM
Sep 11, 2021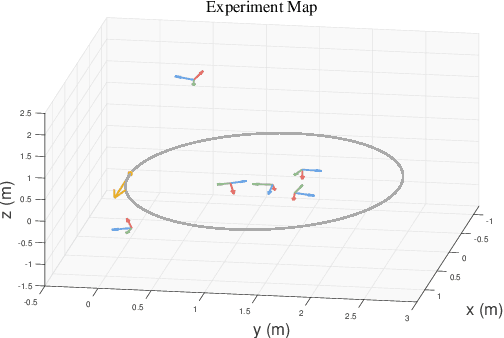
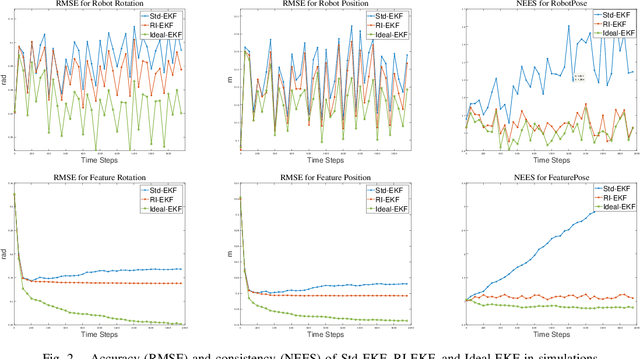
With the recent advance of deep learning based object recognition and estimation, it is possible to consider object level SLAM where the pose of each object is estimated in the SLAM process. In this paper, based on a novel Lie group structure, a right invariant extended Kalman filter (RI-EKF) for object based SLAM is proposed. The observability analysis shows that the proposed algorithm automatically maintains the correct unobservable subspace, while standard EKF (Std-EKF) based SLAM algorithm does not. This results in a better consistency for the proposed algorithm comparing to Std-EKF. Finally, simulations and real world experiments validate not only the consistency and accuracy of the proposed algorithm, but also the practicability of the proposed RI-EKF for object based SLAM problem. The MATLAB code of the algorithm is made publicly available.
Toward Consistent Drift-free Visual Inertial Localization on Keyframe Based Map
Mar 21, 2021
Global localization is essential for robots to perform further tasks like navigation. In this paper, we propose a new framework to perform global localization based on a filter-based visual-inertial odometry framework MSCKF. To reduce the computation and memory consumption, we only maintain the keyframe poses of the map and employ Schmidt-EKF to update the state. This global localization framework is shown to be able to maintain the consistency of the state estimator. Furthermore, we introduce a re-linearization mechanism during the updating phase. This mechanism could ease the linearization error of observation function to make the state estimation more precise. The experiments show that this mechanism is crucial for large and challenging scenes. Simulations and experiments demonstrate the effectiveness and consistency of our global localization framework.