 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePOMDP-based Object Search with Growing State Space and Hybrid Action Domain
Apr 16, 2026Efficiently locating target objects in complex indoor environments with diverse furniture, such as shelves, tables, and beds, is a significant challenge for mobile robots. This difficulty arises from factors like localization errors, limited fields of view, and visual occlusion. We address this by framing the object-search task as a highdimensional Partially Observable Markov Decision Process (POMDP) with a growing state space and hybrid (continuous and discrete) action spaces in 3D environments. Based on a meticulously designed perception module, a novel online POMDP solver named the growing neural process filtered k-center clustering tree (GNPF-kCT) is proposed to tackle this problem. Optimal actions are selected using Monte Carlo Tree Search (MCTS) with belief tree reuse for growing state space, a neural process network to filter useless primitive actions, and k-center clustering hypersphere discretization for efficient refinement of high-dimensional action spaces. A modified upper-confidence bound (UCB), informed by belief differences and action value functions within cells of estimated diameters, guides MCTS expansion. Theoretical analysis validates the convergence and performance potential of our method. To address scenarios with limited information or rewards, we also introduce a guessed target object with a grid-world model as a key strategy to enhance search efficiency. Extensive Gazebo simulations with Fetch and Stretch robots demonstrate faster and more reliable target localization than POMDP-based baselines and state-of-the-art (SOTA) non-POMDP-based solvers, especially large language model (LLM) based methods, in object search under the same computational constraints and perception systems. Real-world tests in office environments confirm the practical applicability of our approach. Project page: https://sites.google.com/view/gnpfkct.
Non-Rigid Structure-from-Motion via Differential Geometry with Recoverable Conformal Scale
Oct 02, 2025Non-rigid structure-from-motion (NRSfM), a promising technique for addressing the mapping challenges in monocular visual deformable simultaneous localization and mapping (SLAM), has attracted growing attention. We introduce a novel method, called Con-NRSfM, for NRSfM under conformal deformations, encompassing isometric deformations as a subset. Our approach performs point-wise reconstruction using 2D selected image warps optimized through a graph-based framework. Unlike existing methods that rely on strict assumptions, such as locally planar surfaces or locally linear deformations, and fail to recover the conformal scale, our method eliminates these constraints and accurately computes the local conformal scale. Additionally, our framework decouples constraints on depth and conformal scale, which are inseparable in other approaches, enabling more precise depth estimation. To address the sensitivity of the formulated problem, we employ a parallel separable iterative optimization strategy. Furthermore, a self-supervised learning framework, utilizing an encoder-decoder network, is incorporated to generate dense 3D point clouds with texture. Simulation and experimental results using both synthetic and real datasets demonstrate that our method surpasses existing approaches in terms of reconstruction accuracy and robustness. The code for the proposed method will be made publicly available on the project website: https://sites.google.com/view/con-nrsfm.
Robust 2D lidar-based SLAM in arboreal environments without IMU/GNSS
May 16, 2025Simultaneous localization and mapping (SLAM) approaches for mobile robots remains challenging in forest or arboreal fruit farming environments, where tree canopies obstruct Global Navigation Satellite Systems (GNSS) signals. Unlike indoor settings, these agricultural environments possess additional challenges due to outdoor variables such as foliage motion and illumination variability. This paper proposes a solution based on 2D lidar measurements, which requires less processing and storage, and is more cost-effective, than approaches that employ 3D lidars. Utilizing the modified Hausdorff distance (MHD) metric, the method can solve the scan matching robustly and with high accuracy without needing sophisticated feature extraction. The method's robustness was validated using public datasets and considering various metrics, facilitating meaningful comparisons for future research. Comparative evaluations against state-of-the-art algorithms, particularly A-LOAM, show that the proposed approach achieves lower positional and angular errors while maintaining higher accuracy and resilience in GNSS-denied settings. This work contributes to the advancement of precision agriculture by enabling reliable and autonomous navigation in challenging outdoor environments.
Occupancy-SLAM: An Efficient and Robust Algorithm for Simultaneously Optimizing Robot Poses and Occupancy Map
Feb 10, 2025Joint optimization of poses and features has been extensively studied and demonstrated to yield more accurate results in feature-based SLAM problems. However, research on jointly optimizing poses and non-feature-based maps remains limited. Occupancy maps are widely used non-feature-based environment representations because they effectively classify spaces into obstacles, free areas, and unknown regions, providing robots with spatial information for various tasks. In this paper, we propose Occupancy-SLAM, a novel optimization-based SLAM method that enables the joint optimization of robot trajectory and the occupancy map through a parameterized map representation. The key novelty lies in optimizing both robot poses and occupancy values at different cell vertices simultaneously, a significant departure from existing methods where the robot poses need to be optimized first before the map can be estimated. Evaluations using simulations and practical 2D laser datasets demonstrate that the proposed approach can robustly obtain more accurate robot trajectories and occupancy maps than state-of-the-art techniques with comparable computational time. Preliminary results in the 3D case further confirm the potential of the proposed method in practical 3D applications, achieving more accurate results than existing methods.
Affine EKF: Exploring and Utilizing Sufficient and Necessary Conditions for Observability Maintenance to Improve EKF Consistency
Dec 14, 2024



Inconsistency issue is one crucial challenge for the performance of extended Kalman filter (EKF) based methods for state estimation problems, which is mainly affected by the discrepancy of observability between the EKF model and the underlying dynamic system. In this work, some sufficient and necessary conditions for observability maintenance are first proved. We find that under certain conditions, an EKF can naturally maintain correct observability if the corresponding linearization makes unobservable subspace independent of the state values. Based on this theoretical finding, a novel affine EKF (Aff-EKF) framework is proposed to overcome the inconsistency of standard EKF (Std-EKF) by affine transformations, which not only naturally satisfies the observability constraint but also has a clear design procedure. The advantages of our Aff-EKF framework over some commonly used methods are demonstrated through mathematical analyses. The effectiveness of our proposed method is demonstrated on three simultaneous localization and mapping (SLAM) applications with different types of features, typical point features, point features on a horizontal plane and plane features. Specifically, following the proposed procedure, the naturally consistent Aff-EKFs can be explicitly derived for these problems. The consistency improvement of these Aff-EKFs are validated by Monte Carlo simulations.
Partial-to-Full Registration based on Gradient-SDF for Computer-Assisted Orthopedic Surgery
Oct 04, 2024



In computer-assisted orthopedic surgery (CAOS), accurate pre-operative to intra-operative bone registration is an essential and critical requirement for providing navigational guidance. This registration process is challenging since the intra-operative 3D points are sparse, only partially overlapped with the pre-operative model, and disturbed by noise and outliers. The commonly used method in current state-of-the-art orthopedic robotic system is bony landmarks based registration, but it is very time-consuming for the surgeons. To address these issues, we propose a novel partial-to-full registration framework based on gradient-SDF for CAOS. The simulation experiments using bone models from publicly available datasets and the phantom experiments performed under both optical tracking and electromagnetic tracking systems demonstrate that the proposed method can provide more accurate results than standard benchmarks and be robust to 90% outliers. Importantly, our method achieves convergence in less than 1 second in real scenarios and mean target registration error values as low as 2.198 mm for the entire bone model. Finally, it only requires random acquisition of points for registration by moving a surgical probe over the bone surface without correspondence with any specific bony landmarks, thus showing significant potential clinical value.
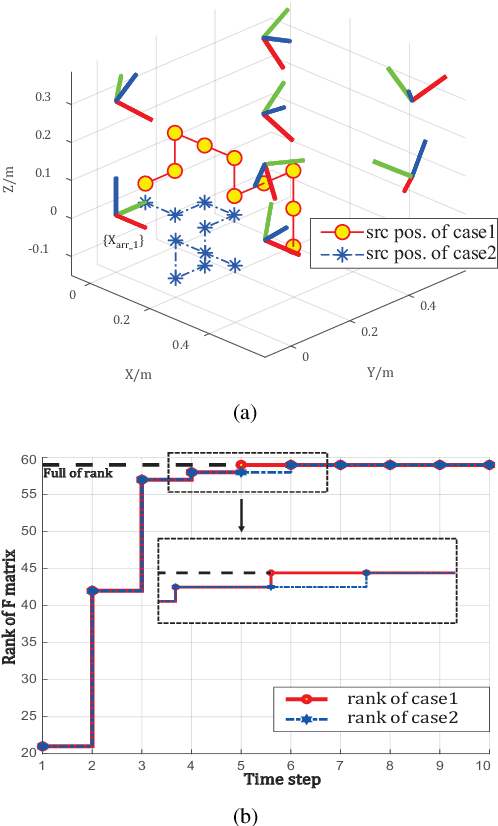
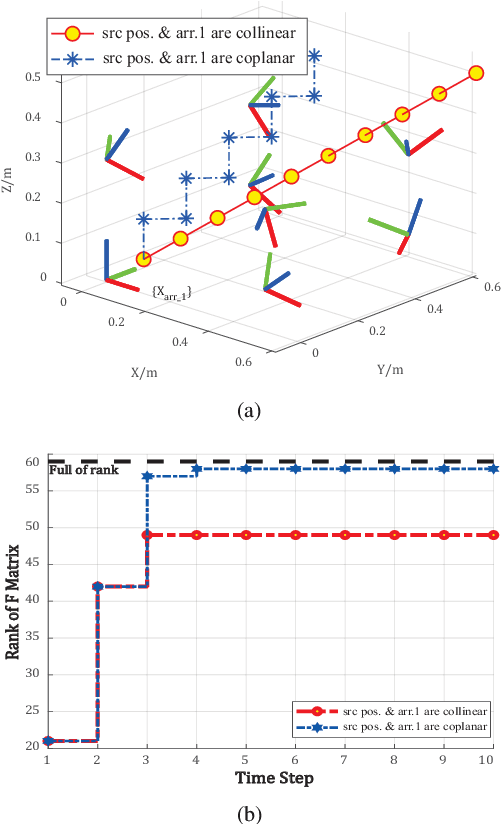
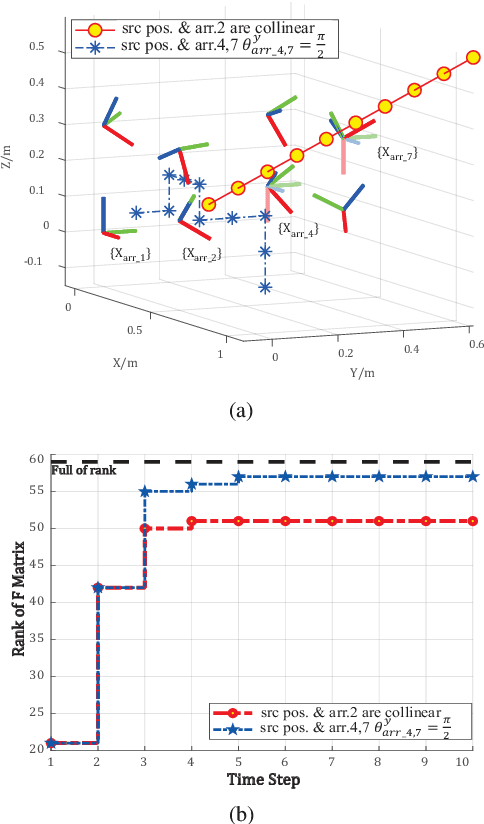
SLAM-based Joint Calibration of Multiple Asynchronous Microphone Arrays and Sound Source Localization
May 30, 2024



Robot audition systems with multiple microphone arrays have many applications in practice. However, accurate calibration of multiple microphone arrays remains challenging because there are many unknown parameters to be identified, including the relative transforms (i.e., orientation, translation) and asynchronous factors (i.e., initial time offset and sampling clock difference) between microphone arrays. To tackle these challenges, in this paper, we adopt batch simultaneous localization and mapping (SLAM) for joint calibration of multiple asynchronous microphone arrays and sound source localization. Using the Fisher information matrix (FIM) approach, we first conduct the observability analysis (i.e., parameter identifiability) of the above-mentioned calibration problem and establish necessary/sufficient conditions under which the FIM and the Jacobian matrix have full column rank, which implies the identifiability of the unknown parameters. We also discover several scenarios where the unknown parameters are not uniquely identifiable. Subsequently, we propose an effective framework to initialize the unknown parameters, which is used as the initial guess in batch SLAM for multiple microphone arrays calibration, aiming to further enhance optimization accuracy and convergence. Extensive numerical simulations and real experiments have been conducted to verify the performance of the proposed method. The experiment results show that the proposed pipeline achieves higher accuracy with fast convergence in comparison to methods that use the noise-corrupted ground truth of the unknown parameters as the initial guess in the optimization and other existing frameworks.
Occupancy-SLAM: Simultaneously Optimizing Robot Poses and Continuous Occupancy Map
May 17, 2024



In this paper, we propose an optimization based SLAM approach to simultaneously optimize the robot trajectory and the occupancy map using 2D laser scans (and odometry) information. The key novelty is that the robot poses and the occupancy map are optimized together, which is significantly different from existing occupancy mapping strategies where the robot poses need to be obtained first before the map can be estimated. In our formulation, the map is represented as a continuous occupancy map where each 2D point in the environment has a corresponding evidence value. The Occupancy-SLAM problem is formulated as an optimization problem where the variables include all the robot poses and the occupancy values at the selected discrete grid cell nodes. We propose a variation of Gauss-Newton method to solve this new formulated problem, obtaining the optimized occupancy map and robot trajectory together with their uncertainties. Our algorithm is an offline approach since it is based on batch optimization and the number of variables involved is large. Evaluations using simulations and publicly available practical 2D laser datasets demonstrate that the proposed approach can estimate the maps and robot trajectories more accurately than the state-of-the-art techniques, when a relatively accurate initial guess is provided to our algorithm. The video shows the convergence process of the proposed Occupancy-SLAM and comparison of results to Cartographer can be found at \url{https://youtu.be/4oLyVEUC4iY}.
* This paper has been accpeted by Robotics: Science and Systems 2022
CARE: Confidence-rich Autonomous Robot Exploration using Bayesian Kernel Inference and Optimization
Sep 11, 2023



In this paper, we consider improving the efficiency of information-based autonomous robot exploration in unknown and complex environments. We first utilize Gaussian process (GP) regression to learn a surrogate model to infer the confidence-rich mutual information (CRMI) of querying control actions, then adopt an objective function consisting of predicted CRMI values and prediction uncertainties to conduct Bayesian optimization (BO), i.e., GP-based BO (GPBO). The trade-off between the best action with the highest CRMI value (exploitation) and the action with high prediction variance (exploration) can be realized. To further improve the efficiency of GPBO, we propose a novel lightweight information gain inference method based on Bayesian kernel inference and optimization (BKIO), achieving an approximate logarithmic complexity without the need for training. BKIO can also infer the CRMI and generate the best action using BO with bounded cumulative regret, which ensures its comparable accuracy to GPBO with much higher efficiency. Extensive numerical and real-world experiments show the desired efficiency of our proposed methods without losing exploration performance in different unstructured, cluttered environments. We also provide our open-source implementation code at https://github.com/Shepherd-Gregory/BKIO-Exploration.
* Full version for the paper accepted by IEEE Robotics and Automation Letters (RA-L) 2023. arXiv admin note: text overlap with arXiv:2301.00523
Observability Analysis of Graph SLAM-Based Joint Calibration of Multiple Microphone Arrays and Sound Source Localization
Oct 11, 2022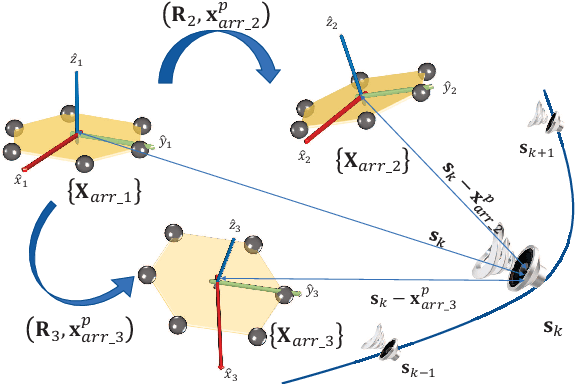
Multiple microphone arrays have many applications in robot audition, including sound source localization, audio scene perception and analysis, etc. However, accurate calibration of multiple microphone arrays remains a challenge because there are many unknown parameters to be identified, including the Euler angles, geometry, asynchronous factors between the microphone arrays. This paper is concerned with joint calibration of multiple microphone arrays and sound source localization using graph simultaneous localization and mapping (SLAM). By using a Fisher information matrix (FIM) approach, we focus on the observability analysis of the graph SLAM framework for the above-mentioned calibration problem. We thoroughly investigate the identifiability of the unknown parameters, including the Euler angles, geometry, asynchronous effects between the microphone arrays, and the sound source locations. We establish necessary/sufficient conditions under which the FIM and the Jacobian matrix have full column rank, which implies the identifiability of the unknown parameters. These conditions are closely related to the variation in the motion of the sound source and the configuration of microphone arrays, and have intuitive and physical interpretations. We also discover several scenarios where the unknown parameters are not uniquely identifiable. All theoretical findings are demonstrated using simulation data.