 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Cognitive Models to Improve Language Model Simulation of Human Persuasion Games
Jun 16, 2026People make decisions differently in strategic interactions. Some update beliefs like a Bayesian; others exhibit biases like motivated reasoning. Although creators of large language models use simulated humans for safety evaluations and training, they often fail to cover this breadth of human behavior. We argue that cognitive science and economics provide a convenient tool for doing so, making use of mathematical models of human decision-making. We propose an approach that we call Equation-to-Behavior Prompting for guiding large language models to match cognitive models, and evaluate this approach on persuasion games based on legal decision-making. We find that large models can approximate equation-based specifications -- Bayesian updating, affine distortion, motivated updating, and Grether's $α$-$β$ model -- using prompting, but small models fail to do so. However, training small models with reinforcement learning to adhere to mathematical rules, Equation-to-Behavior RL, reduces belief error by 26.5% in out-of-distribution parameterizations. We show that these simulations can help create diverse training environments; training small models to consider different kinds of decision-makers improves average belief change by 2.5%--12% over Bayesian-only training, even when persuading GPT-5-mini. Our work could improve human simulations for training and evaluation in increasingly realistic settings, and could also enable novel research into more complicated mathematical models of human decision-making.
T2S-MPC: Time-Embedded Online Adaptive Model Predictive Control for Time-Varying Dynamics
May 24, 2026Recent advances in learning-based model predictive control (MPC) have leveraged neural networks for online model learning, achieving strong performance when nonstationary system dynamics deviate from nominal models. However, existing approaches primarily address specific or relatively structured forms of dynamical variation, leaving more general, unknown, and unpredictable time-varying dynamics insufficiently handled. To tackle this challenge, we propose T2S-MPC, a framework that adaptively learns a residual dynamics model online and integrates it with the nominal model within the MPC framework to enable fast-evolving online planning. To make the model time-aware, we explicitly encode temporal information through a structured time embedding and employ a two-timescale update scheme, allowing the controller to capture nonstationary dynamics while balancing rapid adaptation with stable learning. We evaluate the proposed method on a 2D quadrotor across stabilization and trajectory tracking tasks under diverse time-varying disturbances, including linear drifting and periodic perturbations. Experimental results show that T2S-MPC consistently outperforms classical MPC, neural MPC, and ablated variants in control performance, while also demonstrating strong robustness across a wide range of disturbance conditions without additional tuning. The source code is publicly available at https://github.com/Zeyuu0920/T2S_MPC
Temporally Extended Mixture-of-Experts Models
Apr 22, 2026Mixture-of-Experts models, now popular for scaling capacity at fixed inference speed, switch experts at nearly every token. Once a model outgrows available GPU memory, this churn can render optimizations like offloading and pre-fetching ineffective. We make the case that the options framework in reinforcement learning is a perfect match to tackle this problem, and argue for temporally extended mixture-of-experts layers. Building on the option-critic framework with deliberation costs, we add a controller to each layer that learns when to switch expert sets and which to load. By applying this to gpt-oss-20b with low-rank adapters and a self-distillation reward, our method reduces switch rates from over 50% to below 5% while retaining up to 90% of base-model accuracy on MATH, MMLU, and MMMLU. This shows that even existing pre-trained models can be converted to temporally extended MoEs with lightweight training, with the deliberation cost allowing model trainers to trade off switching rates against capability. We hope this opens a principled path, grounded in the options framework, for memory-efficient serving and continual learning in ever-growing MoE models.
The Geometry of Alignment Collapse: When Fine-Tuning Breaks Safety
Feb 17, 2026Fine-tuning aligned language models on benign tasks unpredictably degrades safety guardrails, even when training data contains no harmful content and developers have no adversarial intent. We show that the prevailing explanation, that fine-tuning updates should be orthogonal to safety-critical directions in high-dimensional parameter space, offers false reassurance: we show this orthogonality is structurally unstable and collapses under the dynamics of gradient descent. We then resolve this through a novel geometric analysis, proving that alignment concentrates in low-dimensional subspaces with sharp curvature, creating a brittle structure that first-order methods cannot detect or defend. While initial fine-tuning updates may indeed avoid these subspaces, the curvature of the fine-tuning loss generates second-order acceleration that systematically steers trajectories into alignment-sensitive regions. We formalize this mechanism through the Alignment Instability Condition, three geometric properties that, when jointly satisfied, lead to safety degradation. Our main result establishes a quartic scaling law: alignment loss grows with the fourth power of training time, governed by the sharpness of alignment geometry and the strength of curvature coupling between the fine-tuning task and safety-critical parameters. These results expose a structural blind spot in the current safety paradigm. The dominant approaches to safe fine-tuning address only the initial snapshot of a fundamentally dynamic problem. Alignment fragility is not a bug to be patched; it is an intrinsic geometric property of gradient descent on curved manifolds. Our results motivate the development of curvature-aware methods, and we hope will further enable a shift in alignment safety analysis from reactive red-teaming to predictive diagnostics for open-weight model deployment.
FrontierCS: Evolving Challenges for Evolving Intelligence
Dec 17, 2025



We introduce FrontierCS, a benchmark of 156 open-ended problems across diverse areas of computer science, designed and reviewed by experts, including CS PhDs and top-tier competitive programming participants and problem setters. Unlike existing benchmarks that focus on tasks with known optimal solutions, FrontierCS targets problems where the optimal solution is unknown, but the quality of a solution can be objectively evaluated. Models solve these tasks by implementing executable programs rather than outputting a direct answer. FrontierCS includes algorithmic problems, which are often NP-hard variants of competitive programming problems with objective partial scoring, and research problems with the same property. For each problem we provide an expert reference solution and an automatic evaluator. Combining open-ended design, measurable progress, and expert curation, FrontierCS provides a benchmark at the frontier of computer-science difficulty. Empirically, we find that frontier reasoning models still lag far behind human experts on both the algorithmic and research tracks, that increasing reasoning budgets alone does not close this gap, and that models often over-optimize for generating merely workable code instead of discovering high-quality algorithms and system designs.
Optimal control of the future via prospective learning with control
Nov 19, 2025Optimal control of the future is the next frontier for AI. Current approaches to this problem are typically rooted in either reinforcement learning (RL). While powerful, this learning framework is mathematically distinct from supervised learning, which has been the main workhorse for the recent achievements in AI. Moreover, RL typically operates in a stationary environment with episodic resets, limiting its utility to more realistic settings. Here, we extend supervised learning to address learning to control in non-stationary, reset-free environments. Using this framework, called ''Prospective Learning with Control (PL+C)'', we prove that under certain fairly general assumptions, empirical risk minimization (ERM) asymptotically achieves the Bayes optimal policy. We then consider a specific instance of prospective learning with control, foraging -- which is a canonical task for any mobile agent -- be it natural or artificial. We illustrate that modern RL algorithms fail to learn in these non-stationary reset-free environments, and even with modifications, they are orders of magnitude less efficient than our prospective foraging agents.
LiveCodeBench Pro: How Do Olympiad Medalists Judge LLMs in Competitive Programming?
Jun 13, 2025Recent reports claim that large language models (LLMs) now outperform elite humans in competitive programming. Drawing on knowledge from a group of medalists in international algorithmic contests, we revisit this claim, examining how LLMs differ from human experts and where limitations still remain. We introduce LiveCodeBench Pro, a benchmark composed of problems from Codeforces, ICPC, and IOI that are continuously updated to reduce the likelihood of data contamination. A team of Olympiad medalists annotates every problem for algorithmic categories and conducts a line-by-line analysis of failed model-generated submissions. Using this new data and benchmark, we find that frontier models still have significant limitations: without external tools, the best model achieves only 53% pass@1 on medium-difficulty problems and 0% on hard problems, domains where expert humans still excel. We also find that LLMs succeed at implementation-heavy problems but struggle with nuanced algorithmic reasoning and complex case analysis, often generating confidently incorrect justifications. High performance appears largely driven by implementation precision and tool augmentation, not superior reasoning. LiveCodeBench Pro thus highlights the significant gap to human grandmaster levels, while offering fine-grained diagnostics to steer future improvements in code-centric LLM reasoning.
Classification with Partially Private Features
Dec 11, 2023



In this paper, we consider differentially private classification when some features are sensitive, while the rest of the features and the label are not. We adapt the definition of differential privacy naturally to this setting. Our main contribution is a novel adaptation of AdaBoost that is not only provably differentially private, but also significantly outperforms a natural benchmark that assumes the entire data of the individual is sensitive in the experiments. As a surprising observation, we show that boosting randomly generated classifiers suffices to achieve high accuracy. Our approach easily adapts to the classical setting where all the features are sensitive, providing an alternate algorithm for differentially private linear classification with a much simpler privacy proof and comparable or higher accuracy than differentially private logistic regression on real-world datasets.
Improved Bound for Mixing Time of Parallel Tempering
Apr 03, 2023
In the field of sampling algorithms, MCMC (Markov Chain Monte Carlo) methods are widely used when direct sampling is not possible. However, multimodality of target distributions often leads to slow convergence and mixing. One common solution is parallel tempering. Though highly effective in practice, theoretical guarantees on its performance are limited. In this paper, we present a new lower bound for parallel tempering on the spectral gap that has a polynomial dependence on all parameters except $\log L$, where $(L + 1)$ is the number of levels. This improves the best existing bound which depends exponentially on the number of modes. Moreover, we complement our result with a hypothetical upper bound on spectral gap that has an exponential dependence on $\log L$, which shows that, in some sense, our bound is tight.
Robust Allocations with Diversity Constraints
Sep 30, 2021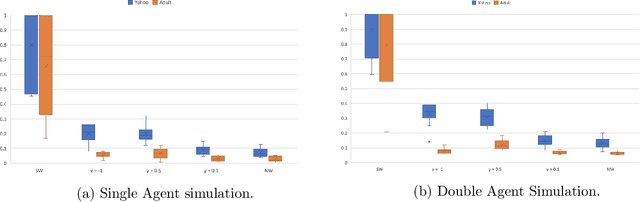
We consider the problem of allocating divisible items among multiple agents, and consider the setting where any agent is allowed to introduce diversity constraints on the items they are allocated. We motivate this via settings where the items themselves correspond to user ad slots or task workers with attributes such as race and gender on which the principal seeks to achieve demographic parity. We consider the following question: When an agent expresses diversity constraints into an allocation rule, is the allocation of other agents hurt significantly? If this happens, the cost of introducing such constraints is disproportionately borne by agents who do not benefit from diversity. We codify this via two desiderata capturing robustness. These are no negative externality -- other agents are not hurt -- and monotonicity -- the agent enforcing the constraint does not see a large increase in value. We show in a formal sense that the Nash Welfare rule that maximizes product of agent values is uniquely positioned to be robust when diversity constraints are introduced, while almost all other natural allocation rules fail this criterion. We also show that the guarantees achieved by Nash Welfare are nearly optimal within a widely studied class of allocation rules. We finally perform an empirical simulation on real-world data that models ad allocations to show that this gap between Nash Welfare and other rules persists in the wild.