 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupply Chain Optimization via Generative Simulation and Iterative Decision Policies
Jul 10, 2025High responsiveness and economic efficiency are critical objectives in supply chain transportation, both of which are influenced by strategic decisions on shipping mode. An integrated framework combining an efficient simulator with an intelligent decision-making algorithm can provide an observable, low-risk environment for transportation strategy design. An ideal simulation-decision framework must (1) generalize effectively across various settings, (2) reflect fine-grained transportation dynamics, (3) integrate historical experience with predictive insights, and (4) maintain tight integration between simulation feedback and policy refinement. We propose Sim-to-Dec framework to satisfy these requirements. Specifically, Sim-to-Dec consists of a generative simulation module, which leverages autoregressive modeling to simulate continuous state changes, reducing dependence on handcrafted domain-specific rules and enhancing robustness against data fluctuations; and a history-future dual-aware decision model, refined iteratively through end-to-end optimization with simulator interactions. Extensive experiments conducted on three real-world datasets demonstrate that Sim-to-Dec significantly improves timely delivery rates and profit.
LLM-ML Teaming: Integrated Symbolic Decoding and Gradient Search for Valid and Stable Generative Feature Transformation
Jun 10, 2025
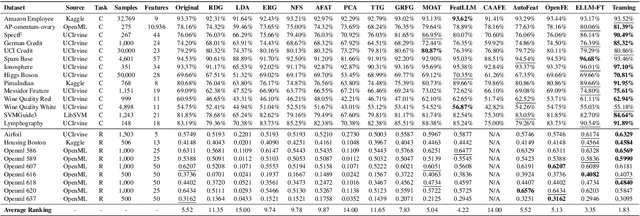
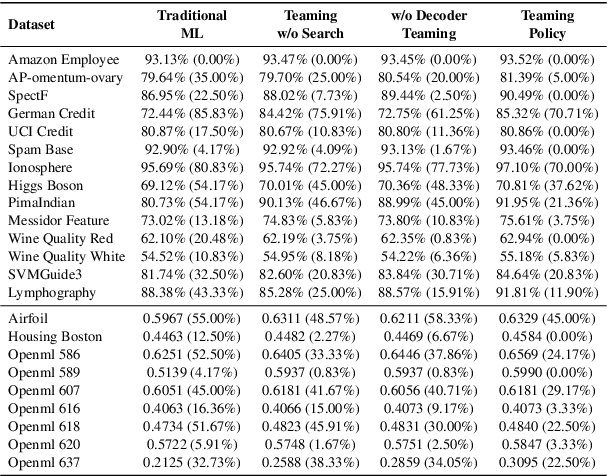
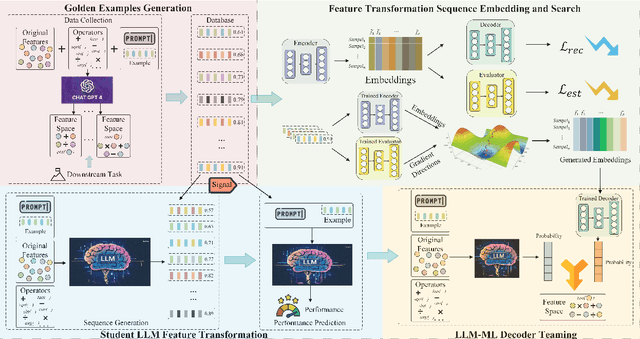
Feature transformation enhances data representation by deriving new features from the original data. Generative AI offers potential for this task, but faces challenges in stable generation (consistent outputs) and valid generation (error-free sequences). Existing methods--traditional MLs' low validity and LLMs' instability--fail to resolve both. We find that LLMs ensure valid syntax, while ML's gradient-steered search stabilizes performance. To bridge this gap, we propose a teaming framework combining LLMs' symbolic generation with ML's gradient optimization. This framework includes four steps: (1) golden examples generation, aiming to prepare high-quality samples with the ground knowledge of the teacher LLM; (2) feature transformation sequence embedding and search, intending to uncover potentially superior embeddings within the latent space; (3) student LLM feature transformation, aiming to distill knowledge from the teacher LLM; (4) LLM-ML decoder teaming, dedicating to combine ML and the student LLM probabilities for valid and stable generation. The experiments on various datasets show that the teaming policy can achieve 5\% improvement in downstream performance while reducing nearly half of the error cases. The results also demonstrate the efficiency and robustness of the teaming policy. Additionally, we also have exciting findings on LLMs' capacity to understand the original data.
Efficient Post-Training Refinement of Latent Reasoning in Large Language Models
Jun 10, 2025
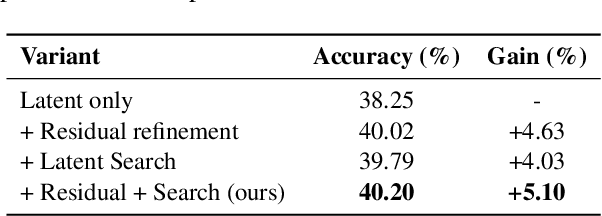
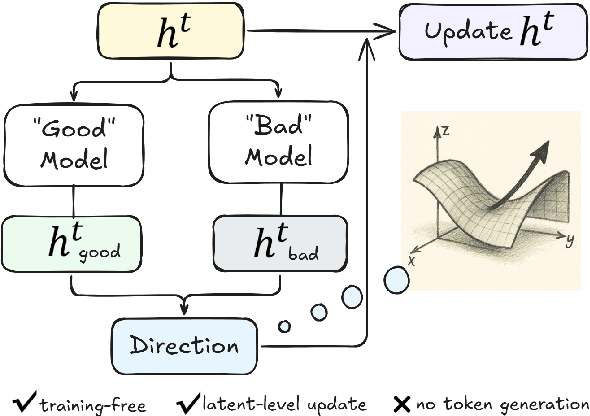
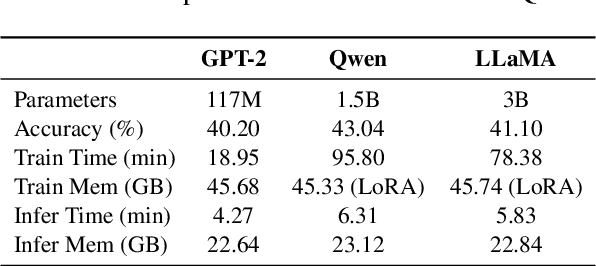
Reasoning is a key component of language understanding in Large Language Models. While Chain-of-Thought prompting enhances performance via explicit intermediate steps, it suffers from sufficient token overhead and a fixed reasoning trajectory, preventing step-wise refinement. Recent advances in latent reasoning address these limitations by refining internal reasoning processes directly in the model's latent space, without producing explicit outputs. However, a key challenge remains: how to effectively update reasoning embeddings during post-training to guide the model toward more accurate solutions. To overcome this challenge, we propose a lightweight post-training framework that refines latent reasoning trajectories using two novel strategies: 1) Contrastive reasoning feedback, which compares reasoning embeddings against strong and weak baselines to infer effective update directions via embedding enhancement; 2) Residual embedding refinement, which stabilizes updates by progressively integrating current and historical gradients, enabling fast yet controlled convergence. Extensive experiments and case studies are conducted on five reasoning benchmarks to demonstrate the effectiveness of the proposed framework. Notably, a 5\% accuracy gain on MathQA without additional training.
Enhanced Whole Page Optimization via Mixed-Grained Reward Mechanism-Adapted Language Models
Jun 10, 2025Optimizing the presentation of search and recommendation results is crucial to enhancing user experience and engagement. Whole Page Optimization (WPO) plays a pivotal role in this process, as it directly influences how information is surfaced to users. While Pre-trained Large Language Models (LLMs) have demonstrated remarkable capabilities in generating coherent and contextually relevant content, fine-tuning these models for complex tasks like WPO presents challenges. Specifically, the need for extensive human-annotated data to mitigate issues such as hallucinations and model instability can be prohibitively expensive, especially in large-scale systems that interact with millions of items daily. In this work, we address the challenge of fine-tuning LLMs for WPO by using user feedback as the supervision. Unlike manually labeled datasets, user feedback is inherently noisy and less precise. To overcome this, we propose a reward-based fine-tuning approach, PageLLM, which employs a mixed-grained reward mechanism that combines page-level and item-level rewards. The page-level reward evaluates the overall quality and coherence, while the item-level reward focuses on the accuracy and relevance of key recommendations. This dual-reward structure ensures that both the holistic presentation and the critical individual components are optimized. We validate PageLLM on both public and industrial datasets. PageLLM outperforms baselines and achieves a 0.44\% GMV increase in an online A/B test with over 10 million users, demonstrating its real-world impact.
Biological Pathway Guided Gene Selection Through Collaborative Reinforcement Learning
May 30, 2025



Gene selection in high-dimensional genomic data is essential for understanding disease mechanisms and improving therapeutic outcomes. Traditional feature selection methods effectively identify predictive genes but often ignore complex biological pathways and regulatory networks, leading to unstable and biologically irrelevant signatures. Prior approaches, such as Lasso-based methods and statistical filtering, either focus solely on individual gene-outcome associations or fail to capture pathway-level interactions, presenting a key challenge: how to integrate biological pathway knowledge while maintaining statistical rigor in gene selection? To address this gap, we propose a novel two-stage framework that integrates statistical selection with biological pathway knowledge using multi-agent reinforcement learning (MARL). First, we introduce a pathway-guided pre-filtering strategy that leverages multiple statistical methods alongside KEGG pathway information for initial dimensionality reduction. Next, for refined selection, we model genes as collaborative agents in a MARL framework, where each agent optimizes both predictive power and biological relevance. Our framework incorporates pathway knowledge through Graph Neural Network-based state representations, a reward mechanism combining prediction performance with gene centrality and pathway coverage, and collaborative learning strategies using shared memory and a centralized critic component. Extensive experiments on multiple gene expression datasets demonstrate that our approach significantly improves both prediction accuracy and biological interpretability compared to traditional methods.
Weaver: Interweaving SQL and LLM for Table Reasoning
May 25, 2025



Querying tables with unstructured data is challenging due to the presence of text (or image), either embedded in the table or in external paragraphs, which traditional SQL struggles to process, especially for tasks requiring semantic reasoning. While Large Language Models (LLMs) excel at understanding context, they face limitations with long input sequences. Existing approaches that combine SQL and LLMs typically rely on rigid, predefined work-flows, limiting their adaptability to complex queries. To address these issues, we introduce Weaver , a modular pipeline that dynamically integrates SQL and LLMs for table-based question answering (TableQA). Weaver generates a flexible, step-by-step plan that combines SQL for structured data retrieval with LLMs for semantic processing. By decomposing complex queries into manageable subtasks, Weaver improves accuracy and generalization. Our experiments show that Weaver consistently outperforms state-of-the-art methods across four TableQA datasets, reducing both API calls and error rates.
Sculpting Features from Noise: Reward-Guided Hierarchical Diffusion for Task-Optimal Feature Transformation
May 21, 2025
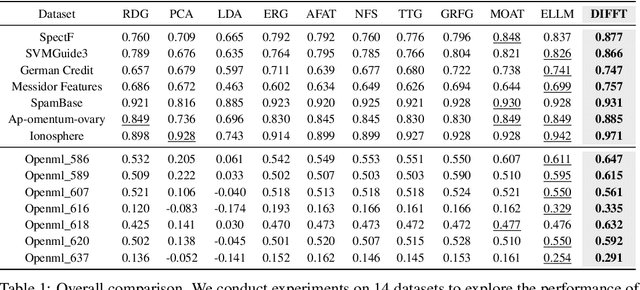
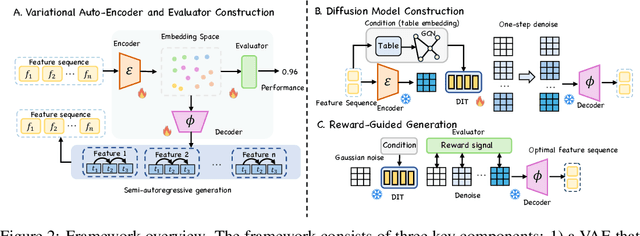
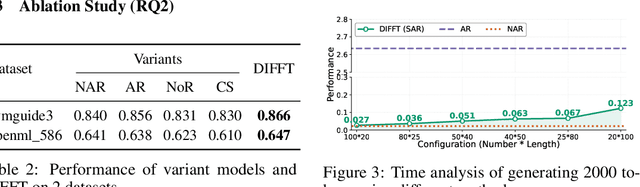
Feature Transformation (FT) crafts new features from original ones via mathematical operations to enhance dataset expressiveness for downstream models. However, existing FT methods exhibit critical limitations: discrete search struggles with enormous combinatorial spaces, impeding practical use; and continuous search, being highly sensitive to initialization and step sizes, often becomes trapped in local optima, restricting global exploration. To overcome these limitations, DIFFT redefines FT as a reward-guided generative task. It first learns a compact and expressive latent space for feature sets using a Variational Auto-Encoder (VAE). A Latent Diffusion Model (LDM) then navigates this space to generate high-quality feature embeddings, its trajectory guided by a performance evaluator towards task-specific optima. This synthesis of global distribution learning (from LDM) and targeted optimization (reward guidance) produces potent embeddings, which a novel semi-autoregressive decoder efficiently converts into structured, discrete features, preserving intra-feature dependencies while allowing parallel inter-feature generation. Extensive experiments on 14 benchmark datasets show DIFFT consistently outperforms state-of-the-art baselines in predictive accuracy and robustness, with significantly lower training and inference times.
Brownian Bridge Augmented Surrogate Simulation and Injection Planning for Geological CO$_2$ Storage
May 21, 2025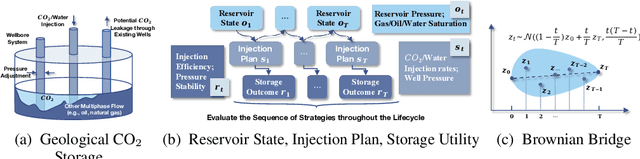
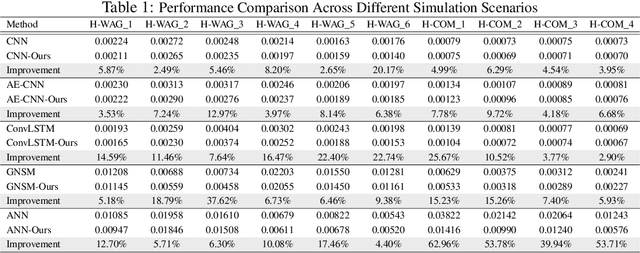
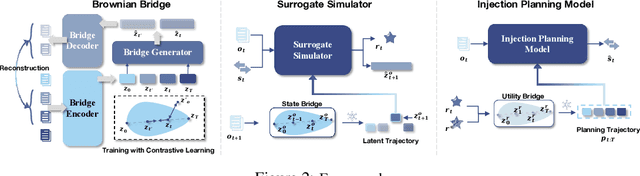

Geological CO2 storage (GCS) involves injecting captured CO2 into deep subsurface formations to support climate goals. The effective management of GCS relies on adaptive injection planning to dynamically control injection rates and well pressures to balance both storage safety and efficiency. Prior literature, including numerical optimization methods and surrogate-optimization methods, is limited by real-world GCS requirements of smooth state transitions and goal-directed planning within limited time. To address these limitations, we propose a Brownian Bridge-augmented framework for surrogate simulation and injection planning in GCS and develop two insights: (i) Brownian bridge as a smooth state regularizer for better surrogate simulation; (ii) Brownian bridge as goal-time-conditioned planning guidance for improved injection planning. Our method has three stages: (i) learning deep Brownian bridge representations with contrastive and reconstructive losses from historical reservoir and utility trajectories, (ii) incorporating Brownian bridge-based next state interpolation for simulator regularization, and (iii) guiding injection planning with Brownian utility-conditioned trajectories to generate high-quality injection plans. Experimental results across multiple datasets collected from diverse GCS settings demonstrate that our framework consistently improves simulation fidelity and planning effectiveness while maintaining low computational overhead.
Agentic Feature Augmentation: Unifying Selection and Generation with Teaming, Planning, and Memories
May 21, 2025As a widely-used and practical tool, feature engineering transforms raw data into discriminative features to advance AI model performance. However, existing methods usually apply feature selection and generation separately, failing to strive a balance between reducing redundancy and adding meaningful dimensions. To fill this gap, we propose an agentic feature augmentation concept, where the unification of feature generation and selection is modeled as agentic teaming and planning. Specifically, we develop a Multi-Agent System with Long and Short-Term Memory (MAGS), comprising a selector agent to eliminate redundant features, a generator agent to produce informative new dimensions, and a router agent that strategically coordinates their actions. We leverage in-context learning with short-term memory for immediate feedback refinement and long-term memory for globally optimal guidance. Additionally, we employ offline Proximal Policy Optimization (PPO) reinforcement fine-tuning to train the router agent for effective decision-making to navigate a vast discrete feature space. Extensive experiments demonstrate that this unified agentic framework consistently achieves superior task performance by intelligently orchestrating feature selection and generation.
Bridging the Domain Gap in Equation Distillation with Reinforcement Feedback
May 21, 2025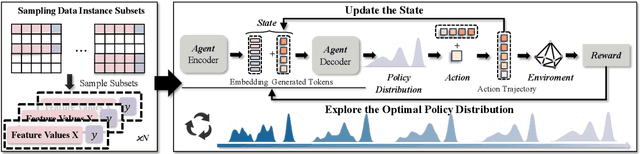
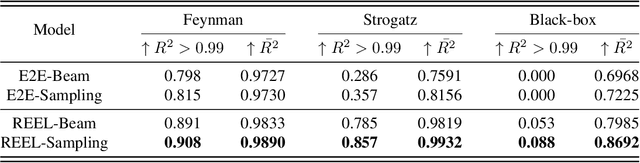
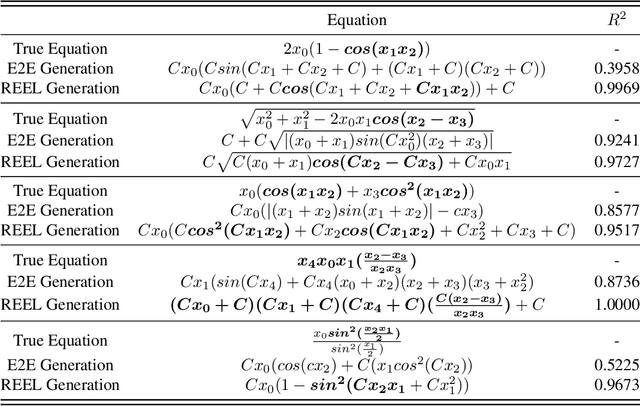
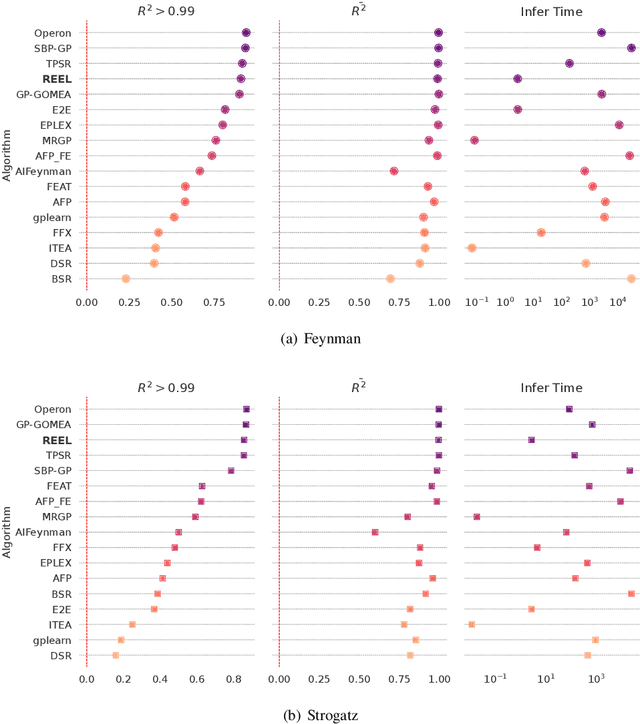
The data-to-equation (Data2Eqn) task aims to discover interpretable mathematical equations that map observed values to labels, offering physical insights and broad applicability across academic and industrial domains. Genetic programming and traditional deep learning-based approaches suffer from search inefficiency and poor generalization on small task-specific datasets. Foundation models showed promise in this area, but existing approaches suffer from: 1) They are pretrained on general-purpose data distributions, making them less effective for domain-specific tasks; and 2) their training objectives focus on token-level alignment, overlooking mathematical semantics, which can lead to inaccurate equations. To address these issues, we aim to enhance the domain adaptability of foundation models for Data2Eqn tasks. In this work, we propose a reinforcement learning-based finetuning framework that directly optimizes the generation policy of a pretrained model through reward signals derived from downstream numerical fitness. Our method allows the model to adapt to specific and complex data distributions and generate mathematically meaningful equations. Extensive experiments demonstrate that our approach improves both the accuracy and robustness of equation generation under complex distributions.