 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePosition: Intelligent Science Laboratory Requires the Integration of Cognitive and Embodied AI
Jun 24, 2025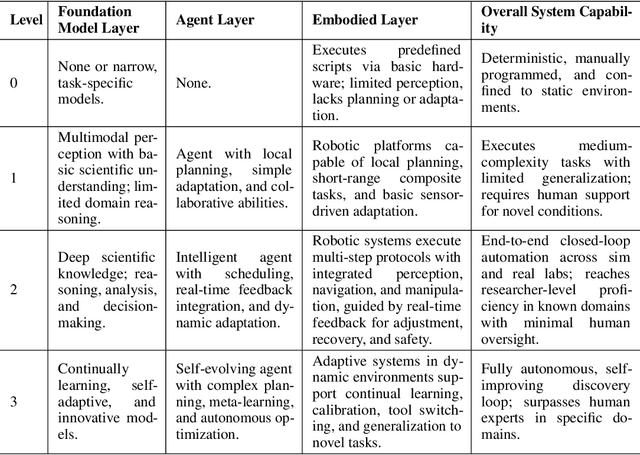
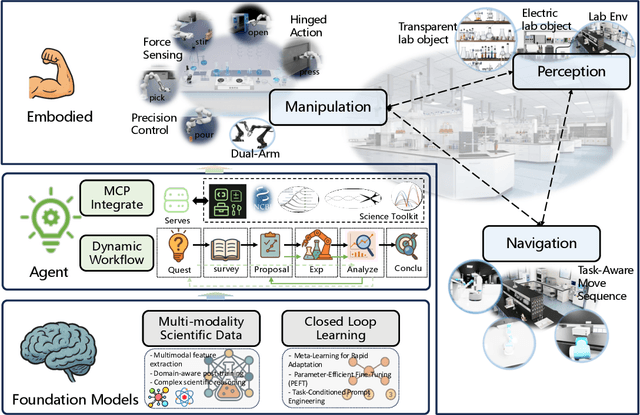
Scientific discovery has long been constrained by human limitations in expertise, physical capability, and sleep cycles. The recent rise of AI scientists and automated laboratories has accelerated both the cognitive and operational aspects of research. However, key limitations persist: AI systems are often confined to virtual environments, while automated laboratories lack the flexibility and autonomy to adaptively test new hypotheses in the physical world. Recent advances in embodied AI, such as generalist robot foundation models, diffusion-based action policies, fine-grained manipulation learning, and sim-to-real transfer, highlight the promise of integrating cognitive and embodied intelligence. This convergence opens the door to closed-loop systems that support iterative, autonomous experimentation and the possibility of serendipitous discovery. In this position paper, we propose the paradigm of Intelligent Science Laboratories (ISLs): a multi-layered, closed-loop framework that deeply integrates cognitive and embodied intelligence. ISLs unify foundation models for scientific reasoning, agent-based workflow orchestration, and embodied agents for robust physical experimentation. We argue that such systems are essential for overcoming the current limitations of scientific discovery and for realizing the full transformative potential of AI-driven science.
A Novel Coronary Artery Registration Method Based on Super-pixel Particle Swarm Optimization
May 30, 2025



Percutaneous Coronary Intervention (PCI) is a minimally invasive procedure that improves coronary blood flow and treats coronary artery disease. Although PCI typically requires 2D X-ray angiography (XRA) to guide catheter placement at real-time, computed tomography angiography (CTA) may substantially improve PCI by providing precise information of 3D vascular anatomy and status. To leverage real-time XRA and detailed 3D CTA anatomy for PCI, accurate multimodal image registration of XRA and CTA is required, to guide the procedure and avoid complications. This is a challenging process as it requires registration of images from different geometrical modalities (2D -> 3D and vice versa), with variations in contrast and noise levels. In this paper, we propose a novel multimodal coronary artery image registration method based on a swarm optimization algorithm, which effectively addresses challenges such as large deformations, low contrast, and noise across these imaging modalities. Our algorithm consists of two main modules: 1) preprocessing of XRA and CTA images separately, and 2) a registration module based on feature extraction using the Steger and Superpixel Particle Swarm Optimization algorithms. Our technique was evaluated on a pilot dataset of 28 pairs of XRA and CTA images from 10 patients who underwent PCI. The algorithm was compared with four state-of-the-art (SOTA) methods in terms of registration accuracy, robustness, and efficiency. Our method outperformed the selected SOTA baselines in all aspects. Experimental results demonstrate the significant effectiveness of our algorithm, surpassing the previous benchmarks and proposes a novel clinical approach that can potentially have merit for improving patient outcomes in coronary artery disease.
LabUtopia: High-Fidelity Simulation and Hierarchical Benchmark for Scientific Embodied Agents
May 28, 2025



Scientific embodied agents play a crucial role in modern laboratories by automating complex experimental workflows. Compared to typical household environments, laboratory settings impose significantly higher demands on perception of physical-chemical transformations and long-horizon planning, making them an ideal testbed for advancing embodied intelligence. However, its development has been long hampered by the lack of suitable simulator and benchmarks. In this paper, we address this gap by introducing LabUtopia, a comprehensive simulation and benchmarking suite designed to facilitate the development of generalizable, reasoning-capable embodied agents in laboratory settings. Specifically, it integrates i) LabSim, a high-fidelity simulator supporting multi-physics and chemically meaningful interactions; ii) LabScene, a scalable procedural generator for diverse scientific scenes; and iii) LabBench, a hierarchical benchmark spanning five levels of complexity from atomic actions to long-horizon mobile manipulation. LabUtopia supports 30 distinct tasks and includes more than 200 scene and instrument assets, enabling large-scale training and principled evaluation in high-complexity environments. We demonstrate that LabUtopia offers a powerful platform for advancing the integration of perception, planning, and control in scientific-purpose agents and provides a rigorous testbed for exploring the practical capabilities and generalization limits of embodied intelligence in future research.