 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing Multimodal Learning through Label Space Reshaping
May 22, 2026Multimodal learning often suffers from modality imbalance, where modalities that converge faster dominate optimization while others remain undertrained. Existing approaches typically mitigate this issue by strengthening the weak modality or adjusting optimization gradients. However, such strategies mainly compensate for optimization rate discrepancies, often at the expense of the strong modality's optimization capacity, without analyzing how these discrepancies arise at the modality level. Based on theoretical insights and empirical observations, we argue that the discrepancy of learning pace arises from differences in the mapping difficulty between modality-specific feature space and the shared label space. To address this issue, we propose Balanced Multimodal Label Reshaping (BMLR), the first method that promotes multimodal balance from the label-side design. BMLR reshapes the cross-modal label space to equalize mapping difficulty across modalities, thereby facilitating modality interaction and injecting richer inter-class information into each modality. Extensive experiments across multiple architectures demonstrate that BMLR consistently improves multimodal performance and exhibits strong compatibility with diverse model designs. The source code will be released soon.
GeoVista: Visually Grounded Active Perception for Ultra-High-Resolution Remote Sensing Understanding
May 14, 2026Interpreting ultra-high-resolution (UHR) remote sensing images requires models to search for sparse and tiny visual evidence across large-scale scenes. Existing remote sensing vision-language models can inspect local regions with zooming and cropping tools, but most exploration strategies follow either a one-shot focus or a single sequential trajectory. Such single-path exploration can lose global context, leave scattered regions unvisited, and revisit or count the same evidence multiple times. To this end, we propose GeoVista, a planning-driven active perception framework for UHR remote sensing interpretation. Instead of committing to one zooming path, GeoVista first builds a global exploration plan, then verifies multiple candidate regions through branch-wise local inspection, while maintaining an explicit evidence state for cross-region aggregation and de-duplication. To enable this behavior, we introduce APEX-GRO, a cold-start supervised trajectory corpus that reformulates diverse UHR tasks as Global-Region-Object interactive reasoning processes with a unified, scale-invariant spatial representation. We further design an Observe-Plan-Track mechanism for global observation, adaptive region inspection, and evidence tracking, and align the model with a GRPO-based strategy using step-wise rewards for planning, localization, and final answer correctness. Experiments on RSHR-Bench, XLRS-Bench, and LRS-VQA show that GeoVista achieves state-of-the-art performance. Code and dataset are available at https://github.com/ryan6073/GeoVista
Zoom In, Reason Out: Efficient Far-field Anomaly Detection in Expressway Surveillance Videos via Focused VLM Reasoning Guided by Bayesian Inference
Apr 28, 2026Expressway video anomaly detection is essential for safety management. However, identifying anomalies across diverse scenes remains challenging, particularly for far-field targets exhibiting subtle abnormal vehicle motions. While Vision-Language Models (VLMs) demonstrate strong semantic reasoning capabilities, processing global frames causes attention dilution for these far-field objects and incurs prohibitive computational costs. To address these issues, we propose VIBES, an asynchronous collaborative framework utilizing VLMs guided by Bayesian inference. Specifically, to overcome poor generalization across varying expressway environments, we introduce an online Bayesian inference module. This module continuously evaluates vehicle trajectories to dynamically update the probabilistic boundaries of normal driving behaviors, serving as an asynchronous trigger to precisely localize anomalies in space and time. Instead of processing the continuous video stream, the VLM processes only the localized visual regions indicated by the trigger. This targeted visual input prevents attention dilution and enables accurate semantic reasoning. Extensive evaluations demonstrate that VIBES improves detection accuracy for far-field anomalies and reduces computational overhead, achieving high real-time efficiency and explainability while demonstrating generalization across diverse expressway conditions.
STK-Adapter: Incorporating Evolving Graph and Event Chain for Temporal Knowledge Graph Extrapolation
Apr 21, 2026Temporal Knowledge Graph (TKG) extrapolation aims to predict future events based on historical facts. Recent studies have attempted to enhance TKG extrapolation by integrating TKG's evolving structural representations and textual event chains into Large Language Models (LLMs). Yet, two main challenges limit these approaches: (1) The loss of essential spatial-temporal information due to shallow alignment between TKG's graph evolving structural representation and the LLM's semantic space, and (2) the progressive dilution of the TKG's evolving structural features during LLM fine-tuning. To address these challenges, we propose the Spatial-Temporal Knowledge Adapter (STK-Adapter), which flexibly integrates the evolving graph encoder and the LLM to facilitate TKG reasoning. In STK-Adapter, a Spatial-Temporal MoE is designed to capture spatial structures and temporal patterns inherent in TKGs. An Event-Aware MoE is employed to model intricate temporal semantics dependencies within event chains. In addition, a Cross-Modality Alignment MoE is proposed to facilitate deep cross-modality alignment by TKG-guided attention experts. Extensive experiments on benchmark datasets demonstrate that STK-Adapter significantly outperforms state-of-the-art methods and exhibits strong generalization capabilities in cross-dataset task. The code is available at https://github.com/Zhaoshuyuan0246/STK-Adapter.
OmniEarth: A Benchmark for Evaluating Vision-Language Models in Geospatial Tasks
Mar 10, 2026Vision-Language Models (VLMs) have demonstrated effective perception and reasoning capabilities on general-domain tasks, leading to growing interest in their application to Earth observation. However, a systematic benchmark for comprehensively evaluating remote sensing vision-language models (RSVLMs) remains lacking. To address this gap, we introduce OmniEarth, a benchmark for evaluating RSVLMs under realistic Earth observation scenarios. OmniEarth organizes tasks along three capability dimensions: perception, reasoning, and robustness. It defines 28 fine-grained tasks covering multi-source sensing data and diverse geospatial contexts. The benchmark supports two task formulations: multiple-choice VQA and open-ended VQA. The latter includes pure text outputs for captioning tasks, bounding box outputs for visual grounding tasks, and mask outputs for segmentation tasks. To reduce linguistic bias and examine whether model predictions rely on visual evidence, OmniEarth adopts a blind test protocol and a quintuple semantic consistency requirement. OmniEarth includes 9,275 carefully quality-controlled images, including proprietary satellite imagery from Jilin-1 (JL-1), along with 44,210 manually verified instructions. We conduct a systematic evaluation of contrastive learning-based models, general closed-source and open-source VLMs, as well as RSVLMs. Results show that existing VLMs still struggle with geospatially complex tasks, revealing clear gaps that need to be addressed for remote sensing applications. OmniEarth is publicly available at https://huggingface.co/datasets/sjeeudd/OmniEarth.
DIA-CLIP: a universal representation learning framework for zero-shot DIA proteomics
Feb 02, 2026Data-independent acquisition mass spectrometry (DIA-MS) has established itself as a cornerstone of proteomic profiling and large-scale systems biology, offering unparalleled depth and reproducibility. Current DIA analysis frameworks, however, require semi-supervised training within each run for peptide-spectrum match (PSM) re-scoring. This approach is prone to overfitting and lacks generalizability across diverse species and experimental conditions. Here, we present DIA-CLIP, a pre-trained model shifting the DIA analysis paradigm from semi-supervised training to universal cross-modal representation learning. By integrating dual-encoder contrastive learning framework with encoder-decoder architecture, DIA-CLIP establishes a unified cross-modal representation for peptides and corresponding spectral features, achieving high-precision, zero-shot PSM inference. Extensive evaluations across diverse benchmarks demonstrate that DIA-CLIP consistently outperforms state-of-the-art tools, yielding up to a 45% increase in protein identification while achieving a 12% reduction in entrapment identifications. Moreover, DIA-CLIP holds immense potential for diverse practical applications, such as single-cell and spatial proteomics, where its enhanced identification depth facilitates the discovery of novel biomarkers and the elucidates of intricate cellular mechanisms.
Reflections from the 2024 Large Language Model (LLM) Hackathon for Applications in Materials Science and Chemistry
Nov 20, 2024



Here, we present the outcomes from the second Large Language Model (LLM) Hackathon for Applications in Materials Science and Chemistry, which engaged participants across global hybrid locations, resulting in 34 team submissions. The submissions spanned seven key application areas and demonstrated the diverse utility of LLMs for applications in (1) molecular and material property prediction; (2) molecular and material design; (3) automation and novel interfaces; (4) scientific communication and education; (5) research data management and automation; (6) hypothesis generation and evaluation; and (7) knowledge extraction and reasoning from scientific literature. Each team submission is presented in a summary table with links to the code and as brief papers in the appendix. Beyond team results, we discuss the hackathon event and its hybrid format, which included physical hubs in Toronto, Montreal, San Francisco, Berlin, Lausanne, and Tokyo, alongside a global online hub to enable local and virtual collaboration. Overall, the event highlighted significant improvements in LLM capabilities since the previous year's hackathon, suggesting continued expansion of LLMs for applications in materials science and chemistry research. These outcomes demonstrate the dual utility of LLMs as both multipurpose models for diverse machine learning tasks and platforms for rapid prototyping custom applications in scientific research.
A Knowledge-Grounded Dialog System Based on Pre-Trained Language Models
Jun 28, 2021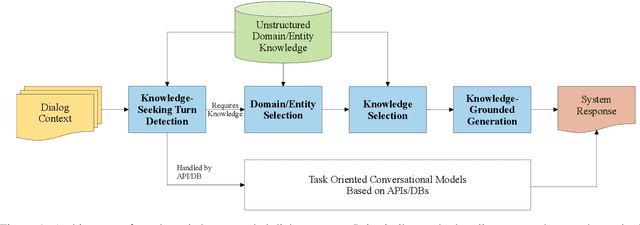

We present a knowledge-grounded dialog system developed for the ninth Dialog System Technology Challenge (DSTC9) Track 1 - Beyond Domain APIs: Task-oriented Conversational Modeling with Unstructured Knowledge Access. We leverage transfer learning with existing language models to accomplish the tasks in this challenge track. Specifically, we divided the task into four sub-tasks and fine-tuned several Transformer models on each of the sub-tasks. We made additional changes that yielded gains in both performance and efficiency, including the combination of the model with traditional entity-matching techniques, and the addition of a pointer network to the output layer of the language model.