 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Scale Learning of General Visual Representations for Transfer
Dec 24, 2019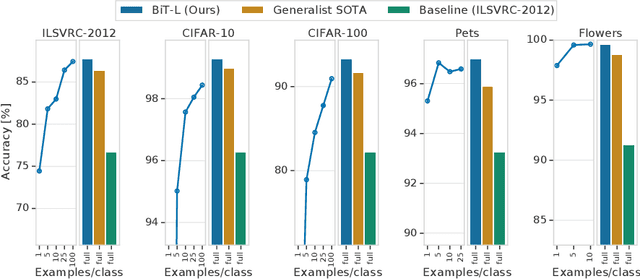
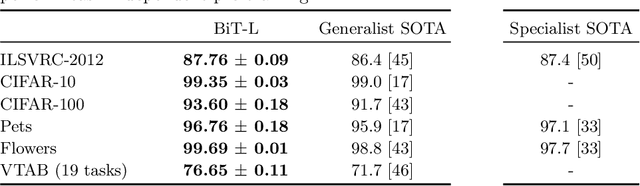
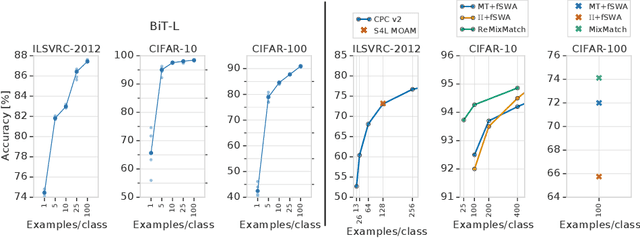
Transfer of pre-trained representations improves sample efficiency and simplifies hyperparameter tuning when training deep neural networks for vision. We revisit the paradigm of pre-training on large supervised datasets and fine-tuning the weights on the target task. We scale up pre-training, and create a simple recipe that we call Big Transfer (BiT). By combining a few carefully selected components, and transferring using a simple heuristic, we achieve strong performance on over 20 datasets. BiT performs well across a surprisingly wide range of data regimes - from 10 to 1M labeled examples. BiT achieves 87.8% top-1 accuracy on ILSVRC-2012, 99.3% on CIFAR-10, and 76.7% on the Visual Task Adaptation Benchmark (which includes 19 tasks). On small datasets, BiT attains 86.4% on ILSVRC-2012 with 25 examples per class, and 97.6% on CIFAR-10 with 10 examples per class. We conduct detailed analysis of the main components that lead to high transfer performance.
Self-Supervised Learning of Video-Induced Visual Invariances
Dec 05, 2019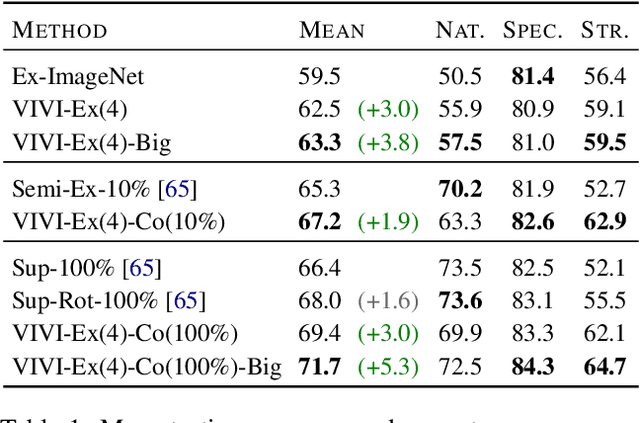
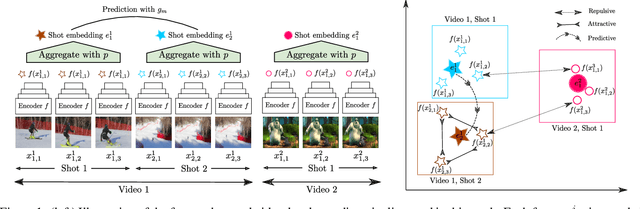
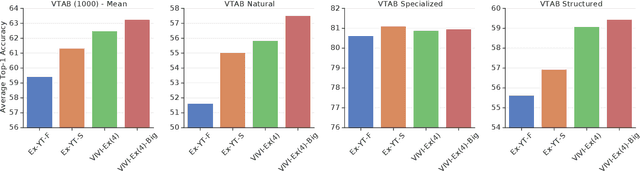
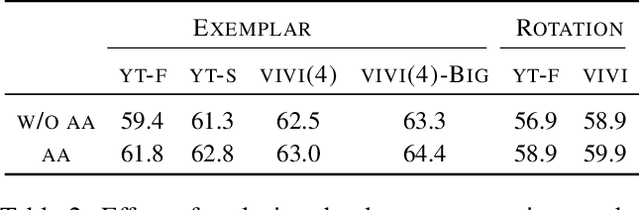
We propose a general framework for self-supervised learning of transferable visual representations based on video-induced visual invariances (VIVI). We consider the implicit hierarchy present in the videos and make use of (i) frame-level invariances (e.g. stability to color and contrast perturbations), (ii) shot/clip-level invariances (e.g. robustness to changes in object orientation and lighting conditions), and (iii) video-level invariances (semantic relationships of scenes across shots/clips), to define a holistic self-supervised loss. Training models using different variants of the proposed framework on videos from the YouTube-8M data set, we obtain state-of-the-art self-supervised transfer learning results on the 19 diverse downstream tasks of the Visual Task Adaptation Benchmark (VTAB), using only 1000 labels per task. We then show how to co-train our models jointly with labeled images, outperforming an ImageNet-pretrained ResNet-50 by 0.8 points with 10x fewer labeled images, as well as the previous best supervised model by 3.7 points using the full ImageNet data set.
Semantic Bottleneck Scene Generation
Nov 26, 2019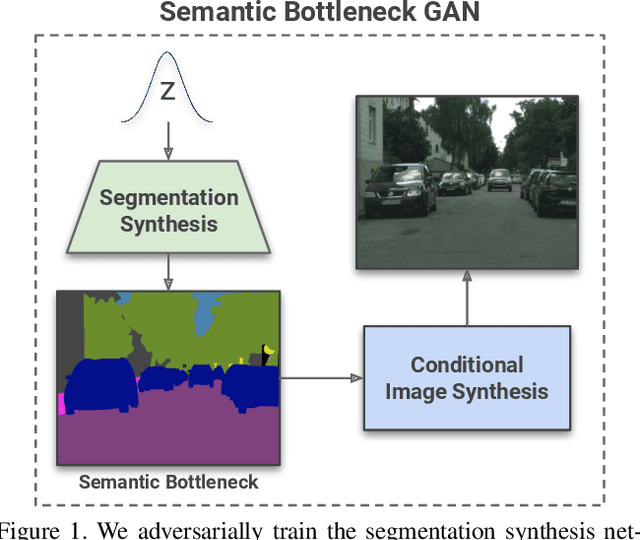
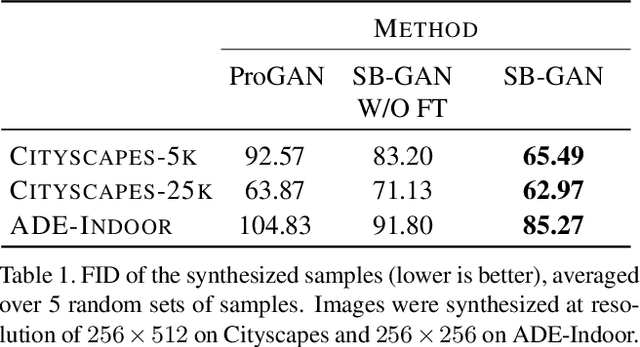
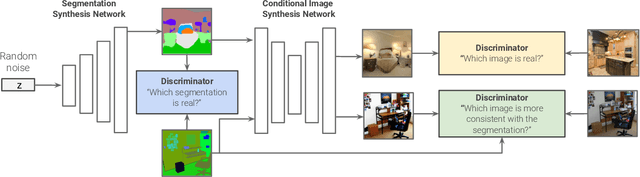
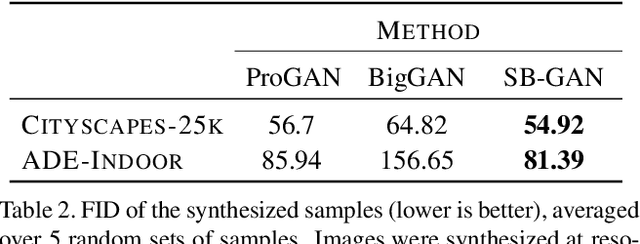
Coupling the high-fidelity generation capabilities of label-conditional image synthesis methods with the flexibility of unconditional generative models, we propose a semantic bottleneck GAN model for unconditional synthesis of complex scenes. We assume pixel-wise segmentation labels are available during training and use them to learn the scene structure. During inference, our model first synthesizes a realistic segmentation layout from scratch, then synthesizes a realistic scene conditioned on that layout. For the former, we use an unconditional progressive segmentation generation network that captures the distribution of realistic semantic scene layouts. For the latter, we use a conditional segmentation-to-image synthesis network that captures the distribution of photo-realistic images conditioned on the semantic layout. When trained end-to-end, the resulting model outperforms state-of-the-art generative models in unsupervised image synthesis on two challenging domains in terms of the Frechet Inception Distance and user-study evaluations. Moreover, we demonstrate the generated segmentation maps can be used as additional training data to strongly improve recent segmentation-to-image synthesis networks.
The Visual Task Adaptation Benchmark
Oct 01, 2019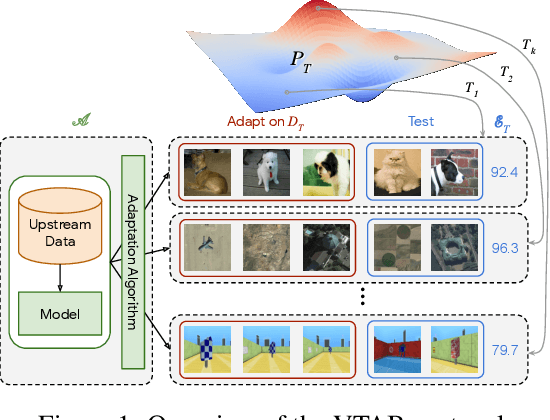
Representation learning promises to unlock deep learning for the long tail of vision tasks without expansive labelled datasets. Yet, the absence of a unified yardstick to evaluate general visual representations hinders progress. Many sub-fields promise representations, but each has different evaluation protocols that are either too constrained (linear classification), limited in scope (ImageNet, CIFAR, Pascal-VOC), or only loosely related to representation quality (generation). We present the Visual Task Adaptation Benchmark (VTAB): a diverse, realistic, and challenging benchmark to evaluate representations. VTAB embodies one principle: good representations adapt to unseen tasks with few examples. We run a large VTAB study of popular algorithms, answering questions like: How effective are ImageNet representation on non-standard datasets? Are generative models competitive? Is self-supervision useful if one already has labels?
On Mutual Information Maximization for Representation Learning
Jul 31, 2019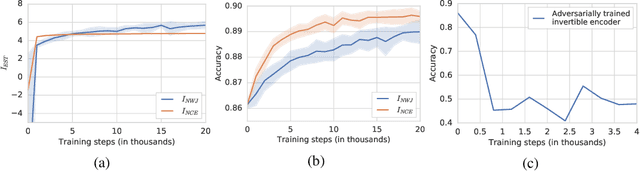
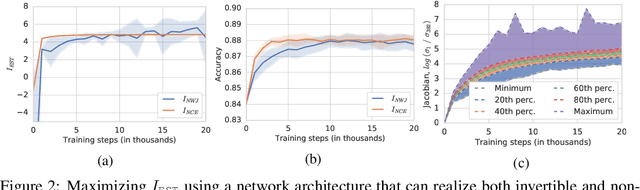
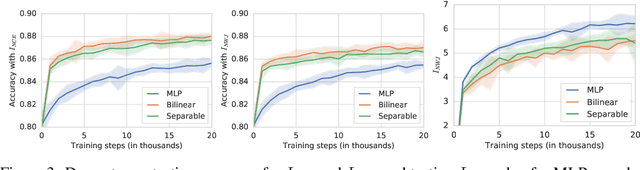
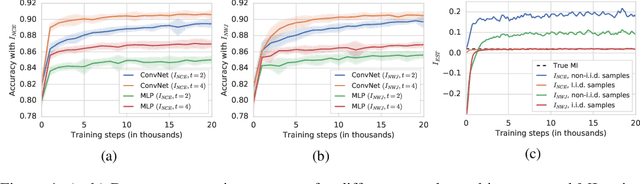
Many recent methods for unsupervised or self-supervised representation learning train feature extractors by maximizing an estimate of the mutual information (MI) between different views of the data. This comes with several immediate problems: For example, MI is notoriously hard to estimate, and using it as an objective for representation learning may lead to highly entangled representations due to its invariance under arbitrary invertible transformations. Nevertheless, these methods have been repeatedly shown to excel in practice. In this paper we argue, and provide empirical evidence, that the success of these methods might be only loosely attributed to the properties of MI, and that they strongly depend on the inductive bias in both the choice of feature extractor architectures and the parametrization of the employed MI estimators. Finally, we establish a connection to deep metric learning and argue that this interpretation may be a plausible explanation for the success of the recently introduced methods.
Google Research Football: A Novel Reinforcement Learning Environment
Jul 25, 2019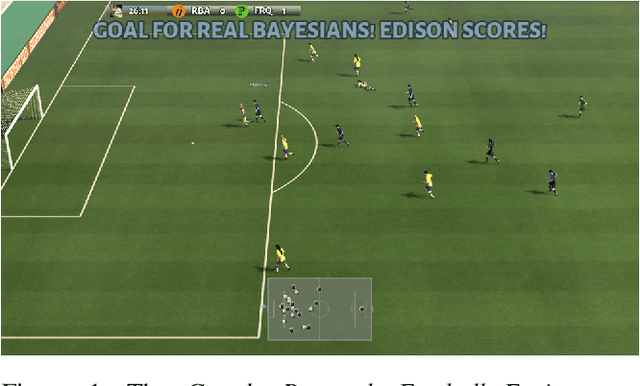
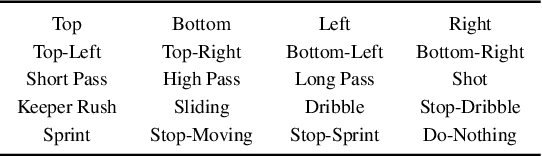
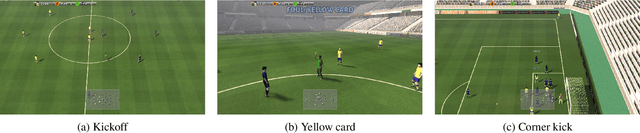
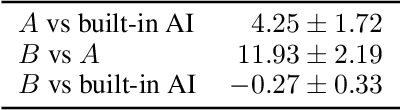
Recent progress in the field of reinforcement learning has been accelerated by virtual learning environments such as video games, where novel algorithms and ideas can be quickly tested in a safe and reproducible manner. We introduce the Google Research Football Environment, a new reinforcement learning environment where agents are trained to play football in an advanced, physics-based 3D simulator. The resulting environment is challenging, easy to use and customize, and it is available under a permissive open-source license. In addition, it provides support for multiplayer and multi-agent experiments. We propose three full-game scenarios of varying difficulty with the Football Benchmarks and report baseline results for three commonly used reinforcement algorithms (IMPALA, PPO, and Ape-X DQN). We also provide a diverse set of simpler scenarios with the Football Academy and showcase several promising research directions.
MULEX: Disentangling Exploitation from Exploration in Deep RL
Jul 01, 2019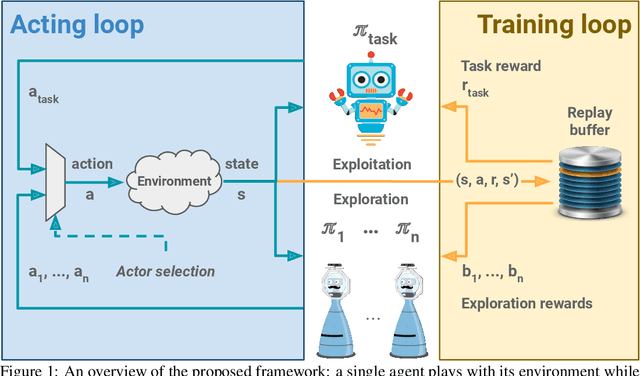
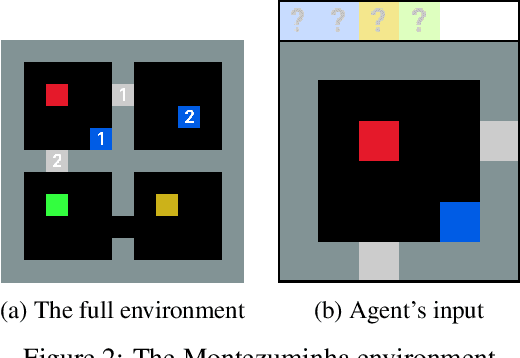
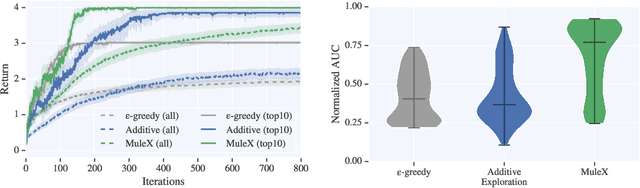
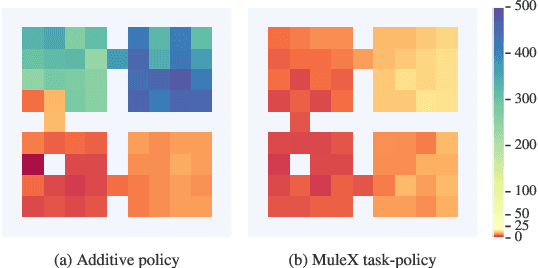
An agent learning through interactions should balance its action selection process between probing the environment to discover new rewards and using the information acquired in the past to adopt useful behaviour. This trade-off is usually obtained by perturbing either the agent's actions (e.g., e-greedy or Gibbs sampling) or the agent's parameters (e.g., NoisyNet), or by modifying the reward it receives (e.g., exploration bonus, intrinsic motivation, or hand-shaped rewards). Here, we adopt a disruptive but simple and generic perspective, where we explicitly disentangle exploration and exploitation. Different losses are optimized in parallel, one of them coming from the true objective (maximizing cumulative rewards from the environment) and others being related to exploration. Every loss is used in turn to learn a policy that generates transitions, all shared in a single replay buffer. Off-policy methods are then applied to these transitions to optimize each loss. We showcase our approach on a hard-exploration environment, show its sample-efficiency and robustness, and discuss further implications.
Adaptive Temporal-Difference Learning for Policy Evaluation with Per-State Uncertainty Estimates
Jun 19, 2019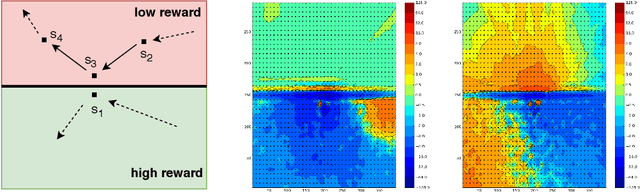
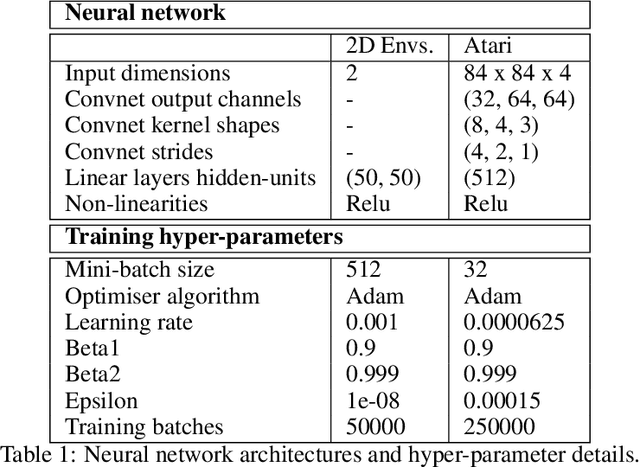
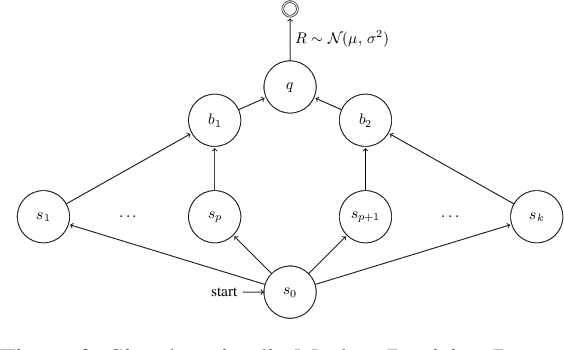
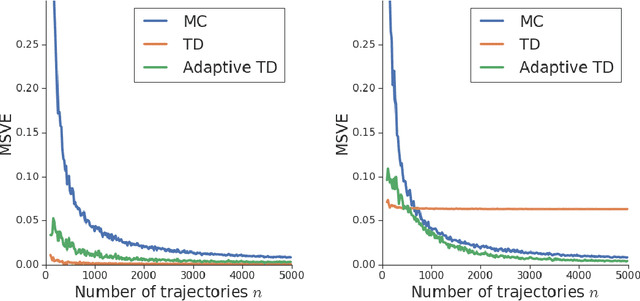
We consider the core reinforcement-learning problem of on-policy value function approximation from a batch of trajectory data, and focus on various issues of Temporal Difference (TD) learning and Monte Carlo (MC) policy evaluation. The two methods are known to achieve complementary bias-variance trade-off properties, with TD tending to achieve lower variance but potentially higher bias. In this paper, we argue that the larger bias of TD can be a result of the amplification of local approximation errors. We address this by proposing an algorithm that adaptively switches between TD and MC in each state, thus mitigating the propagation of errors. Our method is based on learned confidence intervals that detect biases of TD estimates. We demonstrate in a variety of policy evaluation tasks that this simple adaptive algorithm performs competitively with the best approach in hindsight, suggesting that learned confidence intervals are a powerful technique for adapting policy evaluation to use TD or MC returns in a data-driven way.
When can unlabeled data improve the learning rate?
May 28, 2019In semi-supervised classification, one is given access both to labeled and unlabeled data. As unlabeled data is typically cheaper to acquire than labeled data, this setup becomes advantageous as soon as one can exploit the unlabeled data in order to produce a better classifier than with labeled data alone. However, the conditions under which such an improvement is possible are not fully understood yet. Our analysis focuses on improvements in the minimax learning rate in terms of the number of labeled examples (with the number of unlabeled examples being allowed to depend on the number of labeled ones). We argue that for such improvements to be realistic and indisputable, certain specific conditions should be satisfied and previous analyses have failed to meet those conditions. We then demonstrate examples where these conditions can be met, in particular showing rate changes from $1/\sqrt{\ell}$ to $e^{-c\ell}$ and from $1/\sqrt{\ell}$ to $1/\ell$. These results improve our understanding of what is and isn't possible in semi-supervised learning.
Evaluating Generative Models Using Divergence Frontiers
May 26, 2019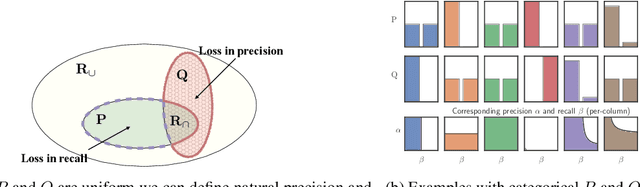
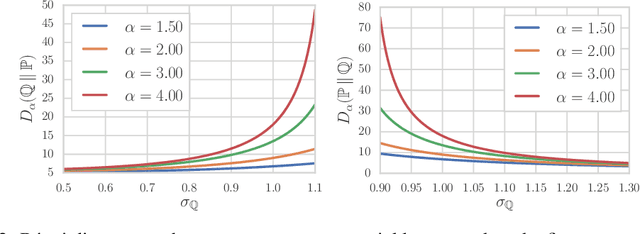
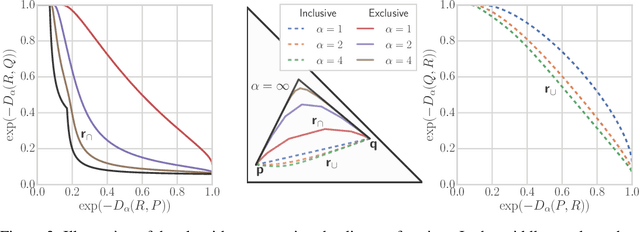
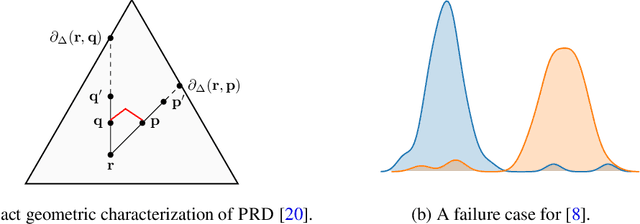
Despite the tremendous progress in the estimation of generative models, the development of tools for diagnosing their failures and assessing their performance has advanced at a much slower pace. Recent developments have investigated metrics that quantify which parts of the true distribution are modeled well, and, on the contrary, what the model fails to capture, akin to precision and recall in information retrieval. In this paper, we present a general evaluation framework for generative models that measures the trade-off between precision and recall using R\'enyi divergences. Our framework provides a novel perspective on existing techniques and extends them to more general domains. As a key advantage, it allows for efficient algorithms that are directly applicable to continuous distributions directly without discretization. We further showcase the proposed techniques on a set of image synthesis models.