 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Aware Functional Behavior Prediction and Material Fatigue Assessment for Circular Factory
Jun 03, 2026Returned products in circular factories re-enter production with heterogeneous degradation states, usage histories, and remaining capability. Reuse cannot be decided from the current inspection alone, because future function fulfillment and component integrity may evolve differently under the next service scenario. Existing PHM approaches support degradation prediction, but often target fixed operating conditions or isolated component benchmarks, while material-fatigue assessment is rarely linked to system-level functional prognosis. This paper addresses this gap for an angle grinder by combining uncertainty-aware functional prediction with component-level fatigue assessment in an instance-specific reliability workflow. The proposed framework combines the current tool state with recent force--torque usage windows. A convolutional encoder extracts loading patterns from spindle forces and shaft torque, and an LSTM backbone predicts nine functional variables as Gaussian mean and variance estimates. In parallel, the same loading history is translated into output-shaft fatigue information through finite-element-supported stress reconstruction, S--N/Miner damage evaluation with Haibach extension, and Paris-law crack-growth analysis. A streaming replay algorithm consolidates both branches into functional, material, and system reliability trajectories. Held-out tests show mean \(2\%\)-tolerance accuracy of 0.9652 across nine outputs. Thermal variables are predicted near-perfectly, while drive motor current and load speed remain the most demanding dynamic outputs, with \(R^2\) values of 0.9750 and 0.9924. Torque history is especially important for these variables, and the conventional LSTM outperforms GRU and xLSTM in the short-history setting. Reliability calibration is most informative for drive motor current, where predicted and observed exceedance probabilities ...
Anomaly Detection for Electro-Hydrostatic Actuators using LSTM Autoencoder
Jun 03, 2026Electro-Hydrostatic Actuators (EHAs) are widely used in aerospace and industrial systems, where timely detection of sensor anomalies is essential to ensure safe and reliable operation. However, the large volume and high sampling frequency of EHA sensor data pose challenges for accurate and efficient anomaly detection. Conventional statistical and classical machine-learning methods such as Z-score, Interquartile Range (IQR), Median Absolute Deviation (MAD), Isolation Forest, Gaussian Mixture, and k-means often fail to capture the temporal dependencies inherent in EHA signals, resulting in limited detection accuracy and elevated false-alarm rates. Furthermore, systematic evaluations of data-driven anomaly detection approaches for EHA systems remain scarce, particularly under varying operational conditions. This study presents an offline anomaly-detection framework for univariate EHA sensor signals, focusing on temperature and pressure data collected from a controlled test bench. The method employs a reconstruction-based Long Short-Term Memory (LSTM) autoencoder, calibrated and evaluated using validation-set reconstruction-error distributions. Performance is assessed across multiple fault-injection scenarios using accuracy, precision, recall, and F1-score, complemented by sensitivity analyses under varying operating conditions. The LSTM autoencoder achieved an average accuracy of 99.0\%, precision up to 100\%, recall between 90.2\% and 99.6\%, and F1-scores from 93.1\% to 99.8\%, demonstrating high detection sensitivity and a very low false-alarm rate across all evaluated sensors. These results highlight the feasibility of data-driven offline anomaly detection for EHAs. Future work will focus on adapting the developed framework for an online (real-time) environment.
IMPACT: A Dataset for Multi-Granularity Human Procedural Action Understanding in Industrial Assembly
Apr 12, 2026We introduce IMPACT, a synchronized five-view RGB-D dataset for deployment-oriented industrial procedural understanding, built around real assembly and disassembly of a commercial angle grinder with professional-grade tools. To our knowledge, IMPACT is the first real industrial assembly benchmark that jointly provides synchronized ego-exo RGB-D capture, decoupled bimanual annotation, compliance-aware state tracking, and explicit anomaly--recovery supervision within a single real industrial workflow. It comprises 112 trials from 13 participants totaling 39.5 hours, with multi-route execution governed by a partial-order prerequisite graph, a six-category anomaly taxonomy, and operator cognitive load measured via NASA-TLX. The annotation hierarchy links hand-specific atomic actions to coarse procedural steps, component assembly states, and per-hand compliance phases, with synchronized null spans across views to decouple perceptual limitations from algorithmic failure. Systematic baselines reveal fundamental limitations that remain invisible to single-task benchmarks, particularly under realistic deployment conditions that involve incomplete observations, flexible execution paths, and corrective behavior. The full dataset, annotations, and evaluation code are available at https://github.com/Kratos-Wen/IMPACT.
A data-driven approach to linking design features with manufacturing process data for sustainable product development
Dec 10, 2025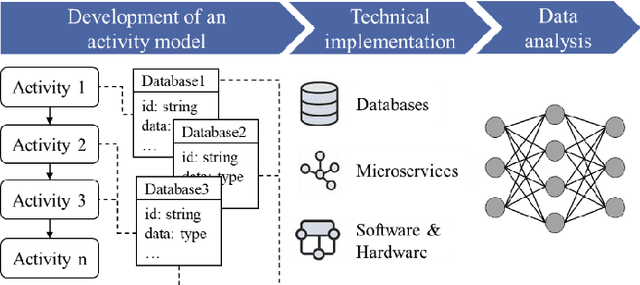
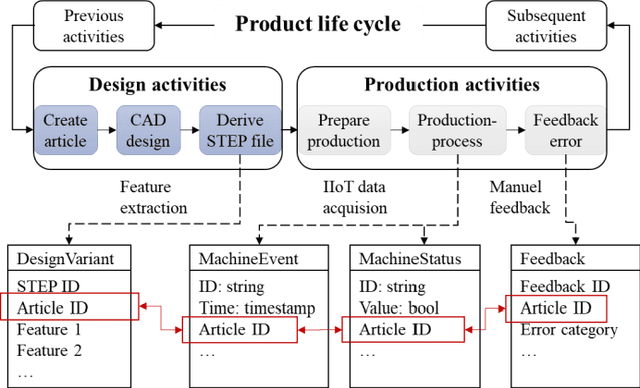
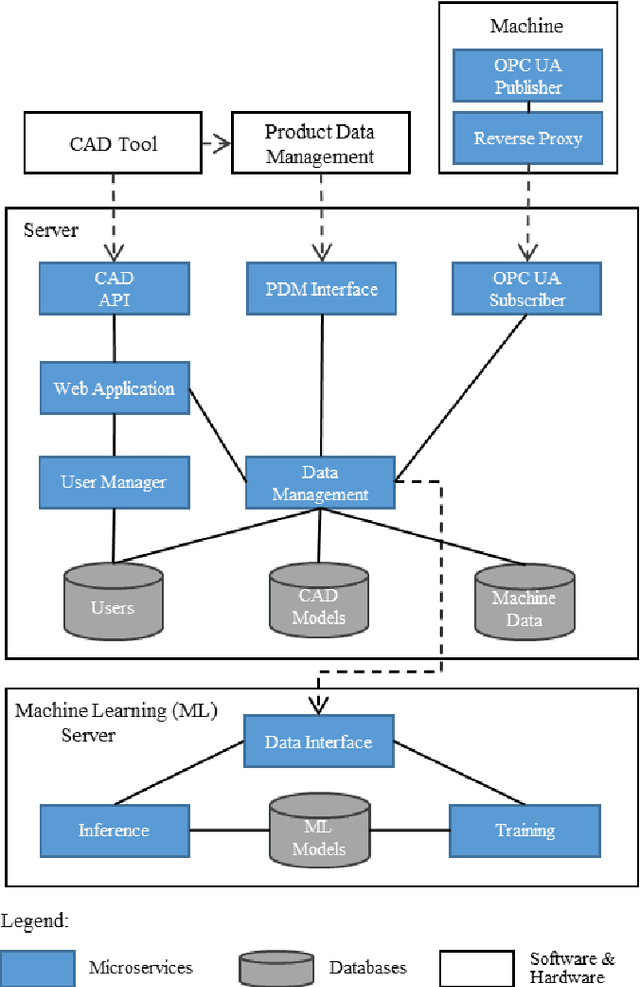
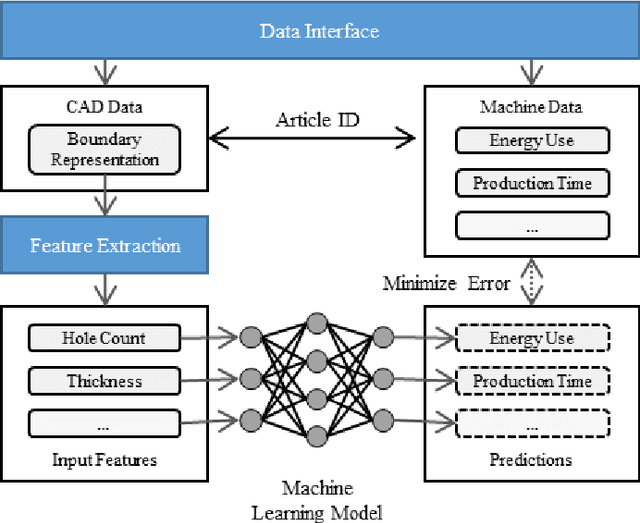
The growing adoption of Industrial Internet of Things (IIoT) technologies enables automated, real-time collection of manufacturing process data, unlocking new opportunities for data-driven product development. Current data-driven methods are generally applied within specific domains, such as design or manufacturing, with limited exploration of integrating design features and manufacturing process data. Since design decisions significantly affect manufacturing outcomes, such as error rates, energy consumption, and processing times, the lack of such integration restricts the potential for data-driven product design improvements. This paper presents a data-driven approach to mapping and analyzing the relationship between design features and manufacturing process data. A comprehensive system architecture is developed to ensure continuous data collection and integration. The linkage between design features and manufacturing process data serves as the basis for developing a machine learning model that enables automated design improvement suggestions. By integrating manufacturing process data with sustainability metrics, this approach opens new possibilities for sustainable product development.
Beyond Task Performance: Human Experience in Human-Robot Collaboration
May 07, 2025Human interaction experience plays a crucial role in the effectiveness of human-machine collaboration, especially as interactions in future systems progress towards tighter physical and functional integration. While automation design has been shown to impact task performance, its influence on human experience metrics such as flow, sense of agency (SoA), and embodiment remains underexplored. This study investigates how variations in automation design affect these psychological experience measures and examines correlations between subjective experience and physiological indicators. A user study was conducted in a simulated wood workshop, where participants collaborated with a lightweight robot under four automation levels. The results of the study indicate that medium automation levels enhance flow, SoA and embodiment, striking a balance between support and user autonomy. In contrast, higher automation, despite optimizing task performance, diminishes perceived flow and agency. Furthermore, we observed that grip force might be considered as a real-time proxy of SoA, while correlations with heart rate variability were inconclusive. The findings underscore the necessity for automation strategies that integrate human- centric metrics, aiming to optimize both performance and user experience in collaborative robotic systems
Towards Precision in Bolted Joint Design: A Preliminary Machine Learning-Based Parameter Prediction
Dec 11, 2024Bolted joints are critical in engineering for maintaining structural integrity and reliability. Accurate prediction of parameters influencing their function and behavior is essential for optimal performance. Traditional methods often fail to capture the non-linear behavior of bolted joints or require significant computational resources, limiting accuracy and efficiency. This study addresses these limitations by combining empirical data with a feed-forward neural network to predict load capacity and friction coefficients. Leveraging experimental data and systematic preprocessing, the model effectively captures nonlinear relationships, including rescaling output variables to address scale discrepancies, achieving 95.24% predictive accuracy. While limited dataset size and diversity restrict generalizability, the findings demonstrate the potential of neural networks as a reliable, efficient alternative for bolted joint design. Future work will focus on expanding datasets and exploring hybrid modeling techniques to enhance applicability.
Muscles in Time: Learning to Understand Human Motion by Simulating Muscle Activations
Oct 31, 2024



Exploring the intricate dynamics between muscular and skeletal structures is pivotal for understanding human motion. This domain presents substantial challenges, primarily attributed to the intensive resources required for acquiring ground truth muscle activation data, resulting in a scarcity of datasets. In this work, we address this issue by establishing Muscles in Time (MinT), a large-scale synthetic muscle activation dataset. For the creation of MinT, we enriched existing motion capture datasets by incorporating muscle activation simulations derived from biomechanical human body models using the OpenSim platform, a common approach in biomechanics and human motion research. Starting from simple pose sequences, our pipeline enables us to extract detailed information about the timing of muscle activations within the human musculoskeletal system. Muscles in Time contains over nine hours of simulation data covering 227 subjects and 402 simulated muscle strands. We demonstrate the utility of this dataset by presenting results on neural network-based muscle activation estimation from human pose sequences with two different sequence-to-sequence architectures. Data and code are provided under https://simplexsigil.github.io/mint.
@Bench: Benchmarking Vision-Language Models for Human-centered Assistive Technology
Sep 21, 2024



As Vision-Language Models (VLMs) advance, human-centered Assistive Technologies (ATs) for helping People with Visual Impairments (PVIs) are evolving into generalists, capable of performing multiple tasks simultaneously. However, benchmarking VLMs for ATs remains under-explored. To bridge this gap, we first create a novel AT benchmark (@Bench). Guided by a pre-design user study with PVIs, our benchmark includes the five most crucial vision-language tasks: Panoptic Segmentation, Depth Estimation, Optical Character Recognition (OCR), Image Captioning, and Visual Question Answering (VQA). Besides, we propose a novel AT model (@Model) that addresses all tasks simultaneously and can be expanded to more assistive functions for helping PVIs. Our framework exhibits outstanding performance across tasks by integrating multi-modal information, and it offers PVIs a more comprehensive assistance. Extensive experiments prove the effectiveness and generalizability of our framework.