 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Task Performance: Human Experience in Human-Robot Collaboration
May 07, 2025Human interaction experience plays a crucial role in the effectiveness of human-machine collaboration, especially as interactions in future systems progress towards tighter physical and functional integration. While automation design has been shown to impact task performance, its influence on human experience metrics such as flow, sense of agency (SoA), and embodiment remains underexplored. This study investigates how variations in automation design affect these psychological experience measures and examines correlations between subjective experience and physiological indicators. A user study was conducted in a simulated wood workshop, where participants collaborated with a lightweight robot under four automation levels. The results of the study indicate that medium automation levels enhance flow, SoA and embodiment, striking a balance between support and user autonomy. In contrast, higher automation, despite optimizing task performance, diminishes perceived flow and agency. Furthermore, we observed that grip force might be considered as a real-time proxy of SoA, while correlations with heart rate variability were inconclusive. The findings underscore the necessity for automation strategies that integrate human- centric metrics, aiming to optimize both performance and user experience in collaborative robotic systems
Adaptive Optimal Trajectory Tracking Control Applied to a Large-Scale Ball-on-Plate System
Oct 26, 2020
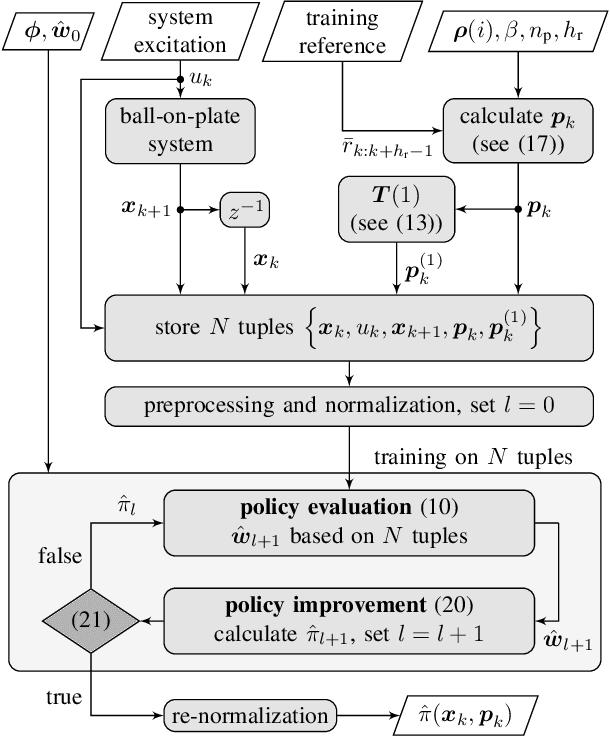
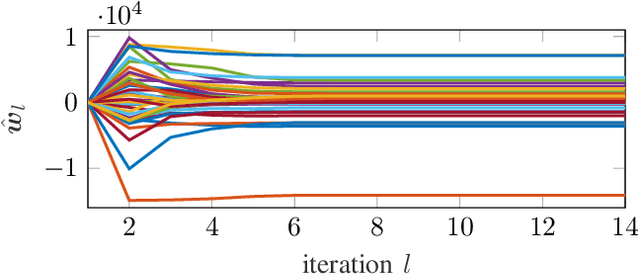
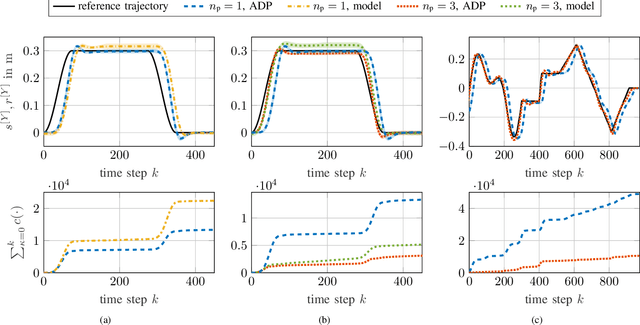
While many theoretical works concerning Adaptive Dynamic Programming (ADP) have been proposed, application results are scarce. Therefore, we design an ADP-based optimal trajectory tracking controller and apply it to a large-scale ball-on-plate system. Our proposed method incorporates an approximated reference trajectory instead of using setpoint tracking and allows to automatically compensate for constant offset terms. Due to the off-policy characteristics of the algorithm, the method requires only a small amount of measured data to train the controller. Our experimental results show that this tracking mechanism significantly reduces the control cost compared to setpoint controllers. Furthermore, a comparison with a model-based optimal controller highlights the benefits of our model-free data-based ADP tracking controller, where no system model and manual tuning are required but the controller is tuned automatically using measured data.