 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Reservoir Computing with Origami and its Application to Robotic Crawling
Jan 20, 2021



A new paradigm called physical reservoir computing has recently emerged, where the nonlinear dynamics of high-dimensional and fixed physical systems are harnessed as a computational resource to achieve complex tasks. Via extensive simulations based on a dynamic truss-frame model, this study shows that an origami structure can perform as a dynamic reservoir with sufficient computing power to emulate high-order nonlinear systems, generate stable limit cycles, and modulate outputs according to dynamic inputs. This study also uncovers the linkages between the origami reservoir's physical designs and its computing power, offering a guideline to optimize the computing performance. Comprehensive parametric studies show that selecting optimal feedback crease distribution and fine-tuning the underlying origami folding designs are the most effective approach to improve computing performance. Furthermore, this study shows how origami's physical reservoir computing power can apply to soft robotic control problems by a case study of earthworm-like peristaltic crawling without traditional controllers. These results can pave the way for origami-based robots with embodied mechanical intelligence.
Exploiting the Nonlinear Stiffness of TMP Origami Folding to Enhance Robotic Jumping Performance
Oct 26, 2020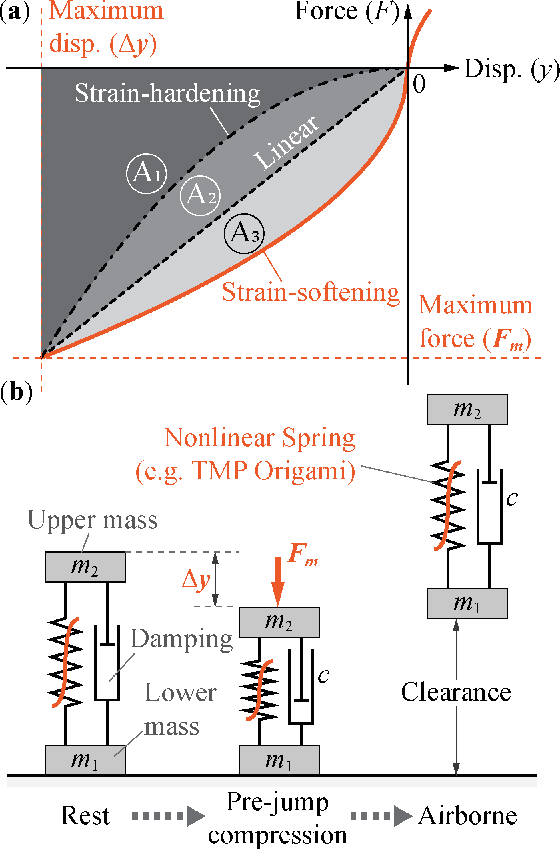

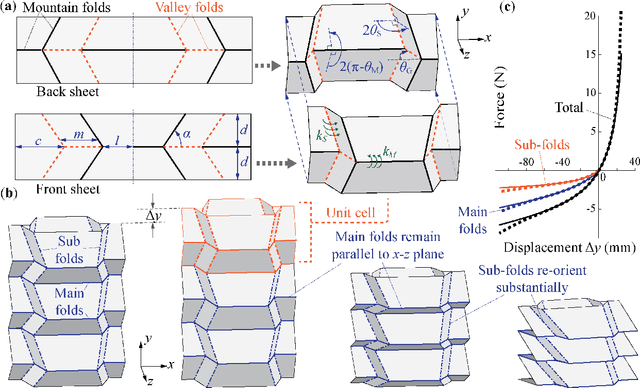

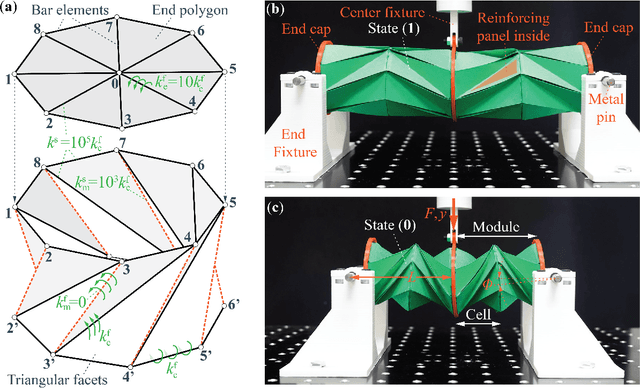
Via numerical simulation and experimental assessment, this study examines the use of origami folding to develop robotic jumping mechanisms with tailored nonlinear stiffness to improve dynamic performance. Specifically, we use Tachi-Miura Polyhedron (TMP) bellow origami -- which exhibits a nonlinear "strain-softening" force-displacement curve -- as a jumping robotic skeleton with embedded energy storage. TMP's nonlinear stiffness allows it to store more energy than a linear spring and offers improved jumping height and airtime. Moreover, the nonlinearity can be tailored by directly changing the underlying TMP crease geometry. A critical challenge is to minimize the TMP's hysteresis and energy loss during its compression stage right before jumping. So we used the plastically annealed lamina emergent origami (PALEO) concept to modify the TMP creases. PALEO increases the folding limit before plastic deformation occurs, thus improving the overall strain energy retention. Jumping experiments confirmed that a nonlinear TMP mechanism achieved roughly 9% improvement in air time and a 13% improvement in jumping height compared to a "control" TMP sample with a relatively linear stiffness. This study's results validate the advantages of using origami in robotic jumping mechanisms and demonstrate the benefits of utilizing nonlinear spring elements for improving jumping performance. Therefore, they could foster a new family of energetically efficient jumping mechanisms with optimized performance in the future.
Harnessing The Multi-Stability Of Kresling Origami For Reconfigurable Articulation In Soft Robotic Arms
Aug 17, 2020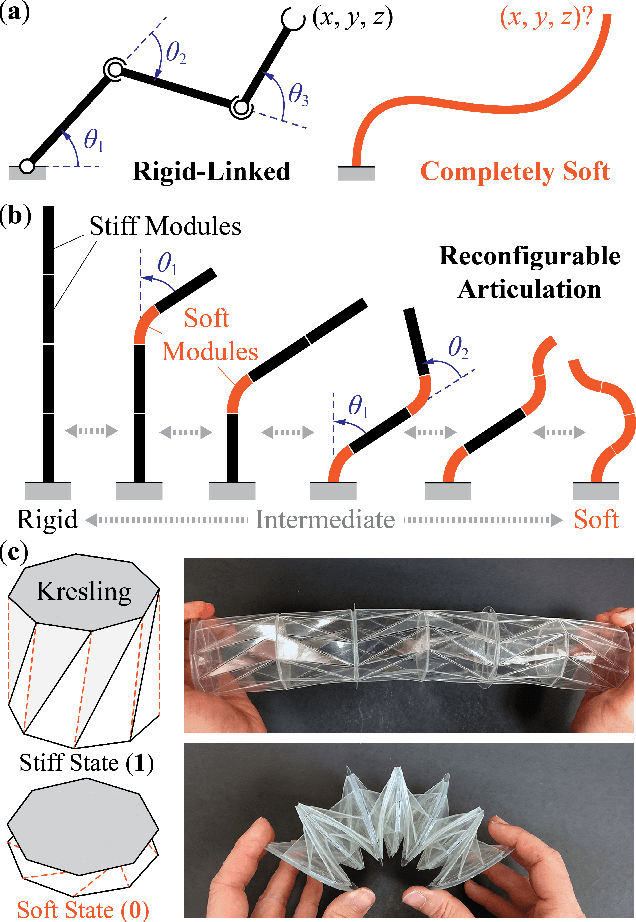
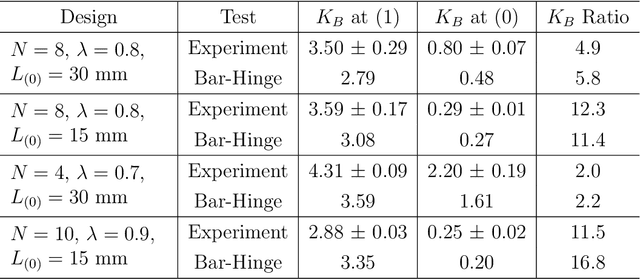
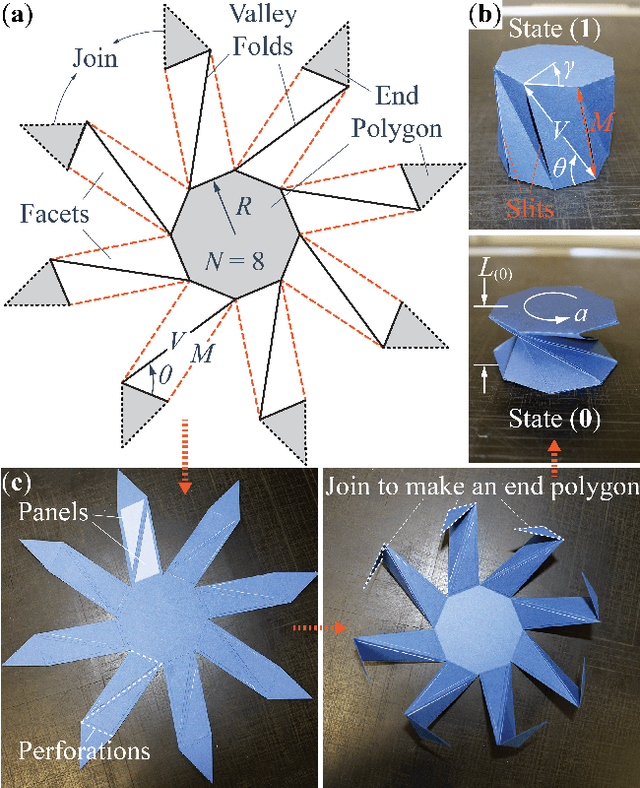
This study examines a biology-inspired approach of using reconfigurable articulation to reduce the control requirement for soft robotic arms. We construct a robotic arm by assembling Kresling origami modules that exhibit predictable bistability. Via switching between their two stable states, these origami modules can behave either like a flexible joint with low bending stiffness or like a stiff link with high stiffness, without requiring any continuous power supply. In this way, the robotic arm can exhibit pseudo-linkage kinematics with lower control requirements and improved motion accuracy. A unique advantage of using origami as the robotic arm skeleton is that its bending stiffness ratio between stable states is directly related to the underlying Kresling design. Therefore, we conduct extensive parametric analyses and experimental validations to identify the optimized Kresling pattern for articulation. The results indicate that a higher angle ratio, a smaller resting length at contracted stable state, and a large number of polygon sides can offer more significant and robust bending stiffness tuning. Based on this insight, we construct a proof-of-concept, tendon-driven robotic arm consisting of three modules, and show that it can exhibit the desired reconfigurable articulation behavior. Moreover, the deformations of this manipulator are consistent with kinematic model predictions, which validate the possibility of using simple controllers for such compliant robotic systems.
Learning to Detect Malicious Clients for Robust Federated Learning
Feb 01, 2020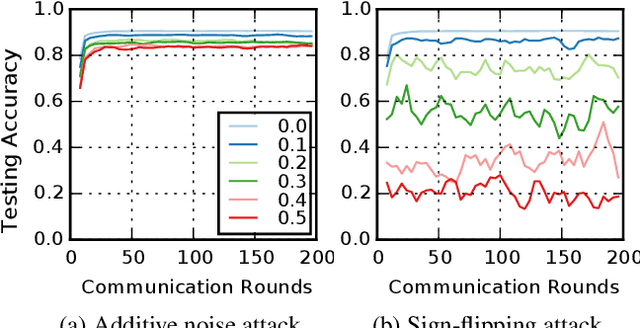
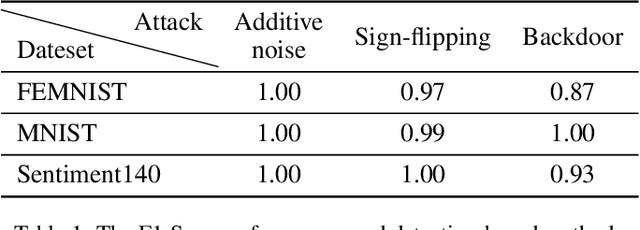
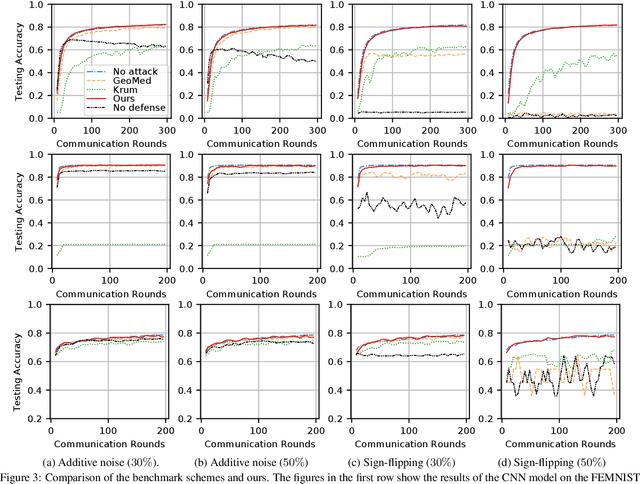
Federated learning systems are vulnerable to attacks from malicious clients. As the central server in the system cannot govern the behaviors of the clients, a rogue client may initiate an attack by sending malicious model updates to the server, so as to degrade the learning performance or enforce targeted model poisoning attacks (a.k.a. backdoor attacks). Therefore, timely detecting these malicious model updates and the underlying attackers becomes critically important. In this work, we propose a new framework for robust federated learning where the central server learns to detect and remove the malicious model updates using a powerful detection model, leading to targeted defense. We evaluate our solution in both image classification and sentiment analysis tasks with a variety of machine learning models. Experimental results show that our solution ensures robust federated learning that is resilient to both the Byzantine attacks and the targeted model poisoning attacks.
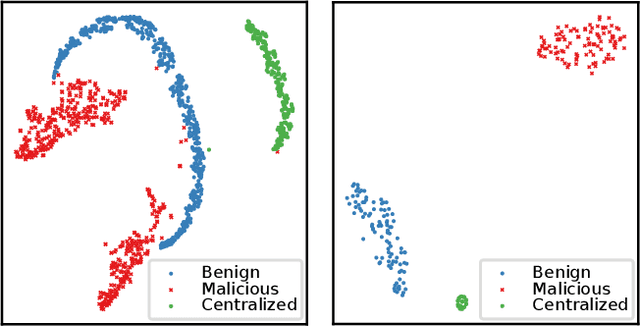
Abnormal Client Behavior Detection in Federated Learning
Oct 22, 2019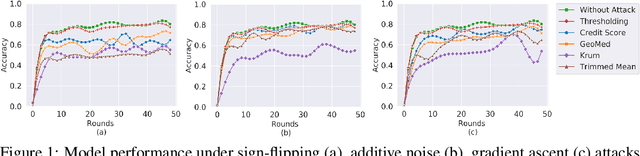
In federated learning systems, clients are autonomous in that their behaviors are not fully governed by the server. Consequently, a client may intentionally or unintentionally deviate from the prescribed course of federated model training, resulting in abnormal behaviors, such as turning into a malicious attacker or a malfunctioning client. Timely detecting those anomalous clients is therefore critical to minimize their adverse impacts. In this work, we propose to detect anomalous clients at the server side. In particular, we generate low-dimensional surrogates of model weight vectors and use them to perform anomaly detection. We evaluate our solution through experiments on image classification model training over the FEMNIST dataset. Experimental results show that the proposed detection-based approach significantly outperforms the conventional defense-based methods.
CoSQL: A Conversational Text-to-SQL Challenge Towards Cross-Domain Natural Language Interfaces to Databases
Sep 11, 2019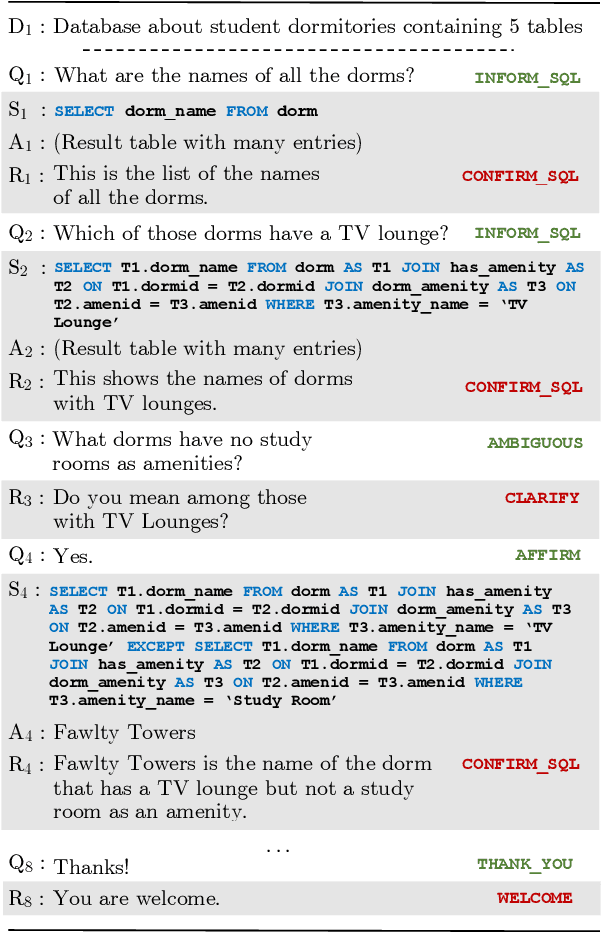
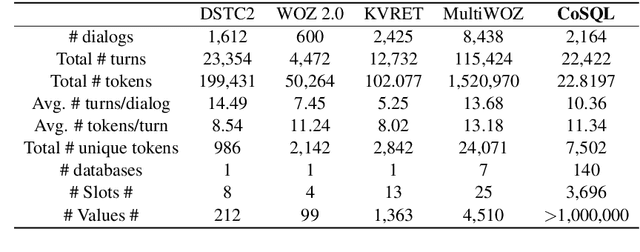
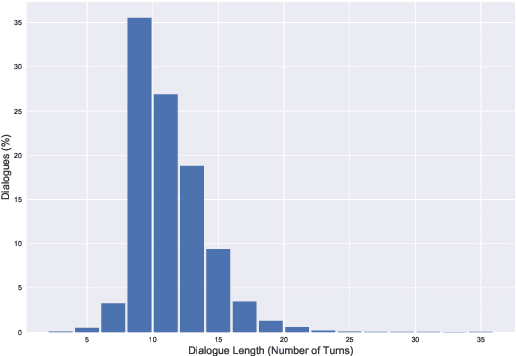
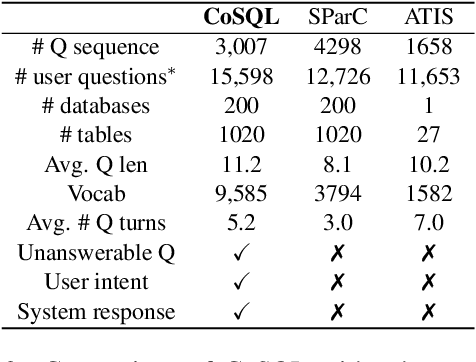
We present CoSQL, a corpus for building cross-domain, general-purpose database (DB) querying dialogue systems. It consists of 30k+ turns plus 10k+ annotated SQL queries, obtained from a Wizard-of-Oz (WOZ) collection of 3k dialogues querying 200 complex DBs spanning 138 domains. Each dialogue simulates a real-world DB query scenario with a crowd worker as a user exploring the DB and a SQL expert retrieving answers with SQL, clarifying ambiguous questions, or otherwise informing of unanswerable questions. When user questions are answerable by SQL, the expert describes the SQL and execution results to the user, hence maintaining a natural interaction flow. CoSQL introduces new challenges compared to existing task-oriented dialogue datasets:(1) the dialogue states are grounded in SQL, a domain-independent executable representation, instead of domain-specific slot-value pairs, and (2) because testing is done on unseen databases, success requires generalizing to new domains. CoSQL includes three tasks: SQL-grounded dialogue state tracking, response generation from query results, and user dialogue act prediction. We evaluate a set of strong baselines for each task and show that CoSQL presents significant challenges for future research. The dataset, baselines, and leaderboard will be released at https://yale-lily.github.io/cosql.
Multi-News: a Large-Scale Multi-Document Summarization Dataset and Abstractive Hierarchical Model
Jun 19, 2019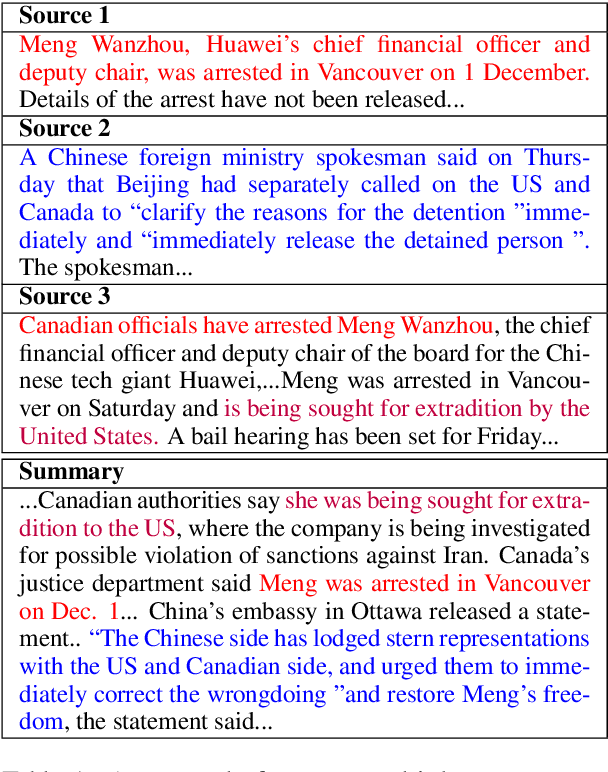
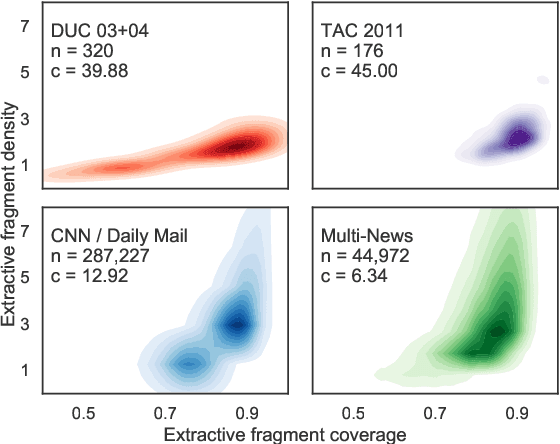
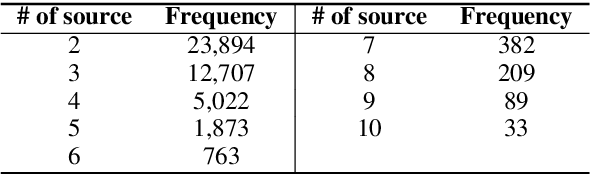
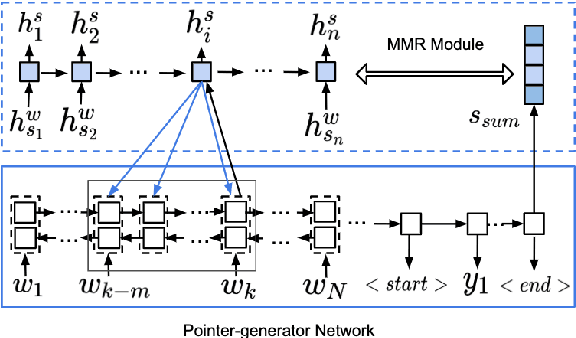
Automatic generation of summaries from multiple news articles is a valuable tool as the number of online publications grows rapidly. Single document summarization (SDS) systems have benefited from advances in neural encoder-decoder model thanks to the availability of large datasets. However, multi-document summarization (MDS) of news articles has been limited to datasets of a couple of hundred examples. In this paper, we introduce Multi-News, the first large-scale MDS news dataset. Additionally, we propose an end-to-end model which incorporates a traditional extractive summarization model with a standard SDS model and achieves competitive results on MDS datasets. We benchmark several methods on Multi-News and release our data and code in hope that this work will promote advances in summarization in the multi-document setting.
Peristaltic locomotion without digital controllers: Exploiting the origami multi-stability to coordinate robotic motions
Jun 10, 2019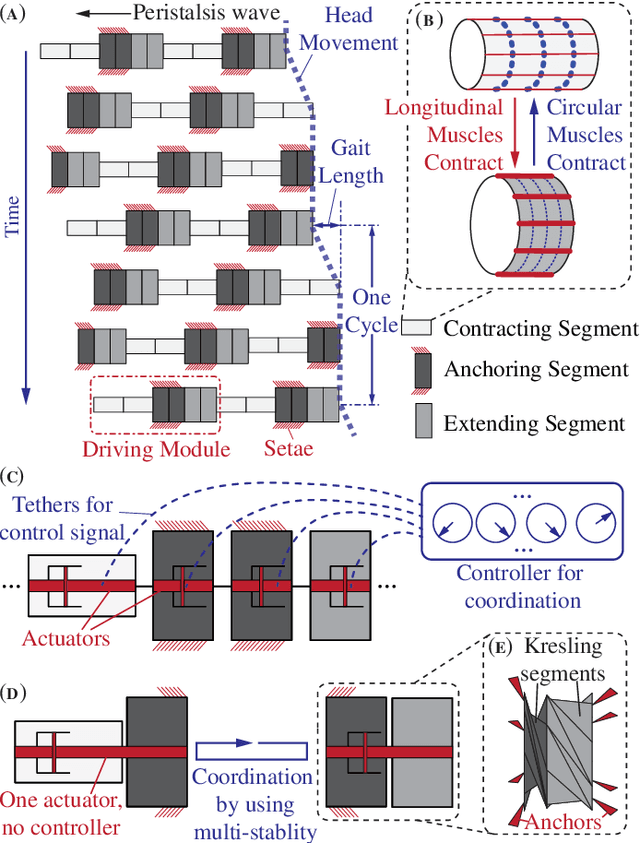
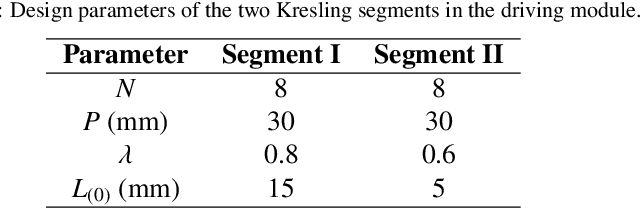
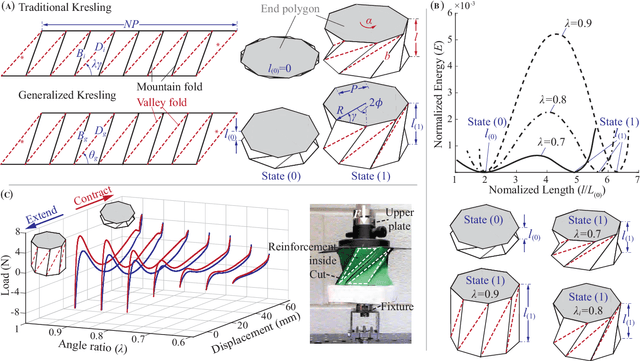
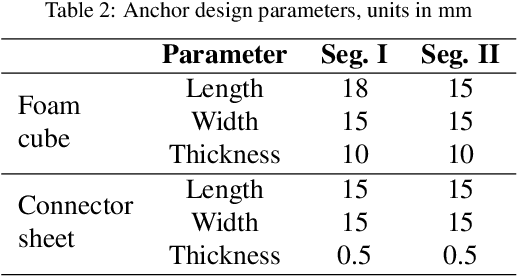
This study proposes and examines a novel approach to generate peristaltic-like locomotion in a segmented origami robot. Specifically, we demonstrate the use of multi-stability embedded in origami skeleton to eliminate the need for multiple actuators or digital controllers to coordinate the complex robotic movements in peristaltic crawling. The crawling robot in this study consists of two serially connected bistable origami segments, each featuring a generalized Kresling design and a foldable anchoring mechanism. Mechanics analysis and experimental testing of this dual-segment module reveal a deterministic deformation sequence or actuation cycle, which is then used to generate the different phases in a peristaltic-like locomotion gait. Instead of individually controlling the segment deformation like in earthworm and other crawling robots, we only control the total length of this robot. Therefore, this approach can significantly reduce the total number of actuators needed for locomotion and simplify the control requirements. Moreover, the richness in Kresling origami design offers us substantial freedom to tailor the locomotion performance. Results of this study will contribute to a paradigm shift in how we can use the mechanics of multi-stability for robotic actuation and control.
SParC: Cross-Domain Semantic Parsing in Context
Jun 05, 2019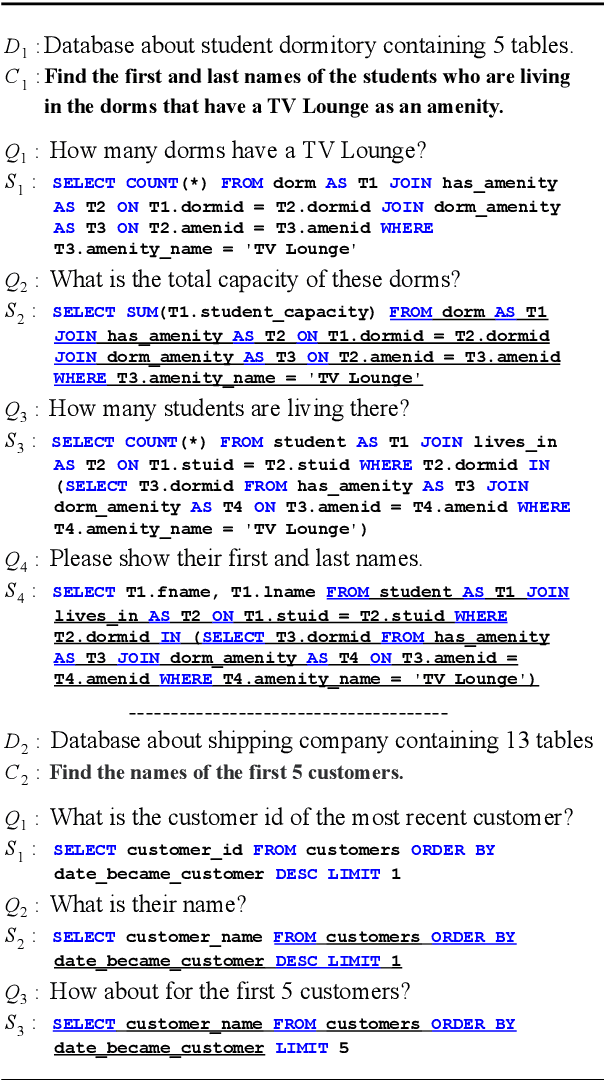
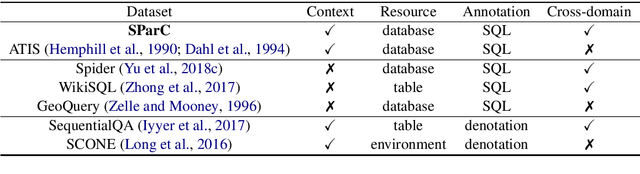
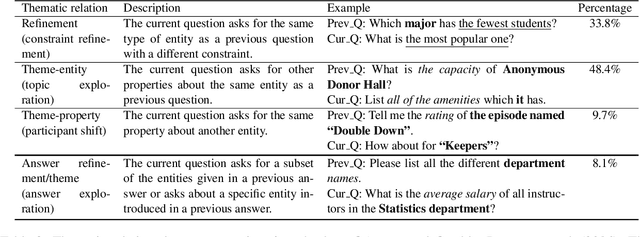

We present SParC, a dataset for cross-domainSemanticParsing inContext that consists of 4,298 coherent question sequences (12k+ individual questions annotated with SQL queries). It is obtained from controlled user interactions with 200 complex databases over 138 domains. We provide an in-depth analysis of SParC and show that it introduces new challenges compared to existing datasets. SParC demonstrates complex contextual dependencies, (2) has greater semantic diversity, and (3) requires generalization to unseen domains due to its cross-domain nature and the unseen databases at test time. We experiment with two state-of-the-art text-to-SQL models adapted to the context-dependent, cross-domain setup. The best model obtains an exact match accuracy of 20.2% over all questions and less than10% over all interaction sequences, indicating that the cross-domain setting and the con-textual phenomena of the dataset present significant challenges for future research. The dataset, baselines, and leaderboard are released at https://yale-lily.github.io/sparc.