 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Aware Sparse Learning and Selective Online Adaptation for Euler-Lagrange Robot Dynamics
Jun 08, 2026Accurate dynamics models are essential for model-based robotic control, yet nominal Euler--Lagrange models often become inaccurate in the presence of payload variation, unmodeled coupling, friction, aerodynamic effects, and changing operating conditions. Most learning-based correction methods improve prediction accuracy by introducing a single additive residual, but do not preserve the internal mechanical structure of Euler--Lagrange systems. This leads to models that do not preserve symmetry, positive-definiteness, or the coupling between inertia and velocity-dependent terms, which can result in physically inconsistent predictions and reduced reliability when embedded in model-based controllers. We propose a structure-preserving residual learning framework that decomposes model mismatch into an inertia correction, the corresponding induced Coriolis term, and a generalized-force residual. The mechanical component is learned under physical constraints, while the disturbance-sensitive component is represented through a sparse history-dependent latent interaction model and adapted online using Bayesian linear regression. This separation preserves key mechanical structure while restricting adaptation to the part of the dynamics most affected by changing conditions. Experiments across multiple robotic platforms, including mobile, aerial, and manipulator systems, show that the proposed method improves dynamics prediction and trajectory tracking under coupled and time-varying dynamics. These results highlight the value of combining structured residual modeling, compact latent interaction selection, and selective online adaptation for real-world model-based control.
Learning Cross-Coupled and Regime Dependent Dynamics for Aerial Manipulation
May 14, 2026Accurate dynamics models are critical for aerial manipulators operating under complex tasks such as payload transport. However, modeling these systems remains fundamentally challenging due to strong quadrotor-manipulator coupling, delayed aerodynamic interactions, and regime-dependent dynamics variations arising from payload changes and manipulator reconfiguration. These effects produce residual dynamics that are simultaneously cross-coupled, history-dependent, and nonstationary, causing both analytical models and purely offline learned models to degrade during deployment. To address these challenges, we propose a structured encoder-decoder framework for adaptive residual dynamics learning in aerial manipulators. The proposed nonlinear latent encoder captures cross-variable coupling and temporal dependencies from state-input histories, while a lightweight linear latent decoder enables online adaptation under regime-dependent nonstationary dynamics. The linear-in-parameter decoder structure permits closed-form Bayesian adaptation together with consistency-driven covariance inflation, enabling rapid and stable adaptation to both transient and slowly varying dynamics changes while remaining compatible with real-time model predictive control (MPC). Experimental results on a real aerial manipulation platform demonstrate improved residual prediction accuracy, faster adaptation under changing operating conditions, and enhanced MPC-based trajectory tracking performance. These results highlight the importance of jointly modeling coupled temporal dynamics and deployment-time nonstationarity for reliable aerial manipulation.
Strategizing at Speed: A Learned Model Predictive Game for Multi-Agent Drone Racing
Feb 06, 2026Autonomous drone racing pushes the boundaries of high-speed motion planning and multi-agent strategic decision-making. Success in this domain requires drones not only to navigate at their limits but also to anticipate and counteract competitors' actions. In this paper, we study a fundamental question that arises in this domain: how deeply should an agent strategize before taking an action? To this end, we compare two planning paradigms: the Model Predictive Game (MPG), which finds interaction-aware strategies at the expense of longer computation times, and contouring Model Predictive Control (MPC), which computes strategies rapidly but does not reason about interactions. We perform extensive experiments to study this trade-off, revealing that MPG outperforms MPC at moderate velocities but loses its advantage at higher speeds due to latency. To address this shortcoming, we propose a Learned Model Predictive Game (LMPG) approach that amortizes model predictive gameplay to reduce latency. In both simulation and hardware experiments, we benchmark our approach against MPG and MPC in head-to-head races, finding that LMPG outperforms both baselines.
Global End-Effector Pose Control of an Underactuated Aerial Manipulator via Reinforcement Learning
Dec 24, 2025Aerial manipulators, which combine robotic arms with multi-rotor drones, face strict constraints on arm weight and mechanical complexity. In this work, we study a lightweight 2-degree-of-freedom (DoF) arm mounted on a quadrotor via a differential mechanism, capable of full six-DoF end-effector pose control. While the minimal design enables simplicity and reduced payload, it also introduces challenges such as underactuation and sensitivity to external disturbances, including manipulation of heavy loads and pushing tasks. To address these, we employ reinforcement learning, training a Proximal Policy Optimization (PPO) agent in simulation to generate feedforward commands for quadrotor acceleration and body rates, along with joint angle targets. These commands are tracked by an incremental nonlinear dynamic inversion (INDI) attitude controller and a PID joint controller, respectively. Flight experiments demonstrate centimeter-level position accuracy and degree-level orientation precision, with robust performance under external force disturbances. The results highlight the potential of learning-based control strategies for enabling contact-rich aerial manipulation using simple, lightweight platforms.
Agile and Cooperative Aerial Manipulation of a Cable-Suspended Load
Jan 30, 2025



Quadrotors can carry slung loads to hard-to-reach locations at high speed. Since a single quadrotor has limited payload capacities, using a team of quadrotors to collaboratively manipulate a heavy object is a scalable and promising solution. However, existing control algorithms for multi-lifting systems only enable low-speed and low-acceleration operations due to the complex dynamic coupling between quadrotors and the load, limiting their use in time-critical missions such as search and rescue. In this work, we present a solution to significantly enhance the agility of cable-suspended multi-lifting systems. Unlike traditional cascaded solutions, we introduce a trajectory-based framework that solves the whole-body kinodynamic motion planning problem online, accounting for the dynamic coupling effects and constraints between the quadrotors and the load. The planned trajectory is provided to the quadrotors as a reference in a receding-horizon fashion and is tracked by an onboard controller that observes and compensates for the cable tension. Real-world experiments demonstrate that our framework can achieve at least eight times greater acceleration than state-of-the-art methods to follow agile trajectories. Our method can even perform complex maneuvers such as flying through narrow passages at high speed. Additionally, it exhibits high robustness against load uncertainties and does not require adding any sensors to the load, demonstrating strong practicality.
Modular Adaptive Aerial Manipulation under Unknown Dynamic Coupling Forces
Oct 10, 2024



Successful aerial manipulation largely depends on how effectively a controller can tackle the coupling dynamic forces between the aerial vehicle and the manipulator. However, this control problem has remained largely unsolved as the existing control approaches either require precise knowledge of the aerial vehicle/manipulator inertial couplings, or neglect the state-dependent uncertainties especially arising during the interaction phase. This work proposes an adaptive control solution to overcome this long standing control challenge without any a priori knowledge of the coupling dynamic terms. Additionally, in contrast to the existing adaptive control solutions, the proposed control framework is modular, that is, it allows independent tuning of the adaptive gains for the vehicle position sub-dynamics, the vehicle attitude sub-dynamics, and the manipulator sub-dynamics. Stability of the closed loop under the proposed scheme is derived analytically, and real-time experiments validate the effectiveness of the proposed scheme over the state-of-the-art approaches.
DroneDiffusion: Robust Quadrotor Dynamics Learning with Diffusion Models
Sep 17, 2024



An inherent fragility of quadrotor systems stems from model inaccuracies and external disturbances. These factors hinder performance and compromise the stability of the system, making precise control challenging. Existing model-based approaches either make deterministic assumptions, utilize Gaussian-based representations of uncertainty, or rely on nominal models, all of which often fall short in capturing the complex, multimodal nature of real-world dynamics. This work introduces DroneDiffusion, a novel framework that leverages conditional diffusion models to learn quadrotor dynamics, formulated as a sequence generation task. DroneDiffusion achieves superior generalization to unseen, complex scenarios by capturing the temporal nature of uncertainties and mitigating error propagation. We integrate the learned dynamics with an adaptive controller for trajectory tracking with stability guarantees. Extensive experiments in both simulation and real-world flights demonstrate the robustness of the framework across a range of scenarios, including unfamiliar flight paths and varying payloads, velocities, and wind disturbances.
Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight
Jul 12, 2023Autonomous, agile quadrotor flight raises fundamental challenges for robotics research in terms of perception, planning, learning, and control. A versatile and standardized platform is needed to accelerate research and let practitioners focus on the core problems. To this end, we present Agilicious, a co-designed hardware and software framework tailored to autonomous, agile quadrotor flight. It is completely open-source and open-hardware and supports both model-based and neural-network--based controllers. Also, it provides high thrust-to-weight and torque-to-inertia ratios for agility, onboard vision sensors, GPU-accelerated compute hardware for real-time perception and neural-network inference, a real-time flight controller, and a versatile software stack. In contrast to existing frameworks, Agilicious offers a unique combination of flexible software stack and high-performance hardware. We compare Agilicious with prior works and demonstrate it on different agile tasks, using both model-based and neural-network--based controllers. Our demonstrators include trajectory tracking at up to 5g and 70 km/h in a motion-capture system, and vision-based acrobatic flight and obstacle avoidance in both structured and unstructured environments using solely onboard perception. Finally, we demonstrate its use for hardware-in-the-loop simulation in virtual-reality environments. Thanks to its versatility, we believe that Agilicious supports the next generation of scientific and industrial quadrotor research.
* 14 pages, 5 figures, 2 tables
Nonlinear MPC for full-pose manipulation of a cable-suspended load using multiple UAVs
Jan 20, 2023



Using multiple UAVs to manipulate the full posture of an object is a promising capability in many industrial applications, such as autonomous building construction and heavy-load transportation. Among various methods, manipulation via cables excels in mechanical simplicity and ease of use, but is challenging from a control perspective. Existing centralized control methods either neglect the dynamic coupling between UAVs and the load or resort to a cascade structure, which limits the operational speed and cannot guarantee safety. In this work, we propose a centralized control method that uses nonlinear model predictive control. This control method takes into account the full nonlinear model of the load-UAV system, as well as the constraints of UAV thrust, collision avoidance, and ensuring all cables are taut. By taking into account the above factors, the proposed control algorithm can fully exploit the performance of UAVs and facilitate the speed of operation. We demonstrate our algorithm through 6-DoF simulations to achieve fast and safe manipulation of the pose of a rigid-body payload using multiple UAVs.
Perception-Aware Perching on Powerlines with Multirotors
Feb 13, 2022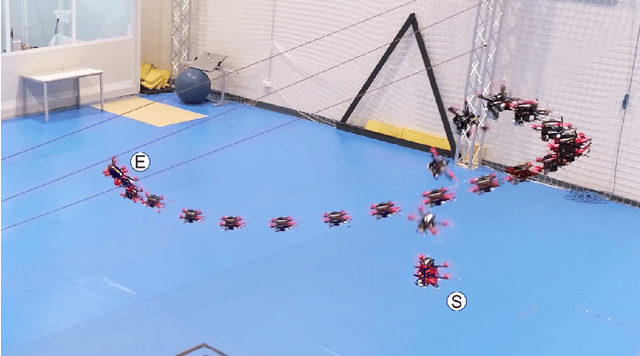
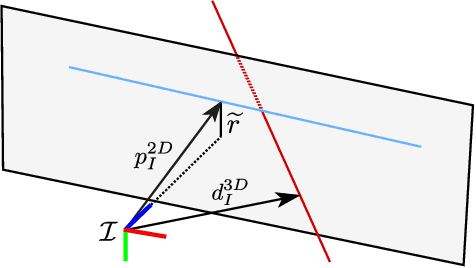
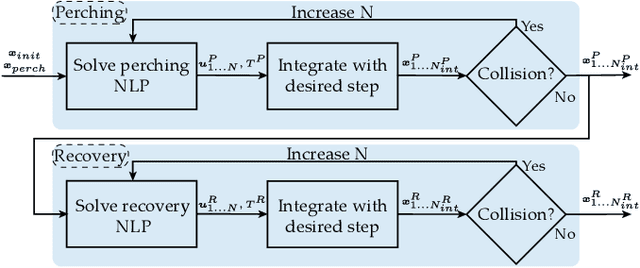
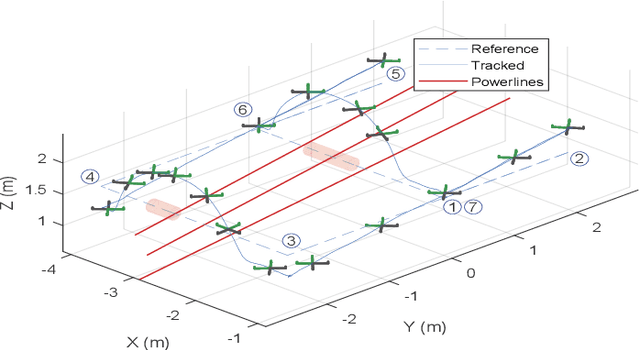
Multirotor aerial robots are becoming widely used for the inspection of powerlines. To enable continuous, robust inspection without human intervention, the robots must be able to perch on the powerlines to recharge their batteries. Highly versatile perching capabilities are necessary to adapt to the variety of configurations and constraints that are present in real powerline systems. This paper presents a novel perching trajectory generation framework that computes perception-aware, collision-free, and dynamically-feasible maneuvers to guide the robot to the desired final state. Trajectory generation is achieved via solving a Nonlinear Programming problem using the Primal-Dual Interior Point method. The problem considers the full dynamic model of the robot down to its single rotor thrusts and minimizes the final pose and velocity errors while avoiding collisions and maximizing the visibility of the powerline during the maneuver. The generated maneuvers consider both the perching and the posterior recovery trajectories. The framework adopts costs and constraints defined by efficient mathematical representations of powerlines, enabling online onboard execution in resource-constrained hardware. The method is validated on-board an agile quadrotor conducting powerline inspection and various perching maneuvers with final pitch values of up to 180 degrees. The developed code is available online at: https://github.com/grvcPerception/pa_powerline_perching