 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Optimization of Process Parameters of a Sensor-Based Sorting System using Gaussian Processes as Surrogate Models
Jul 30, 2025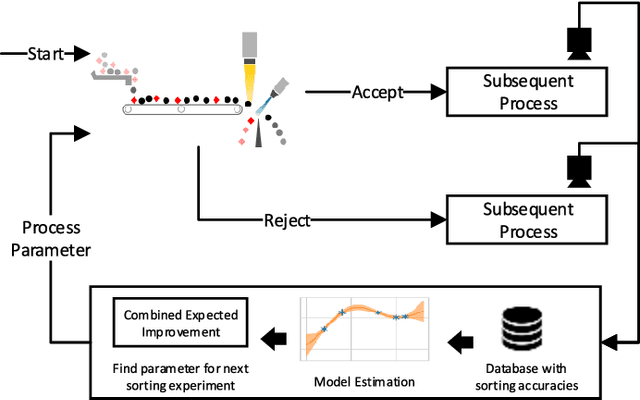
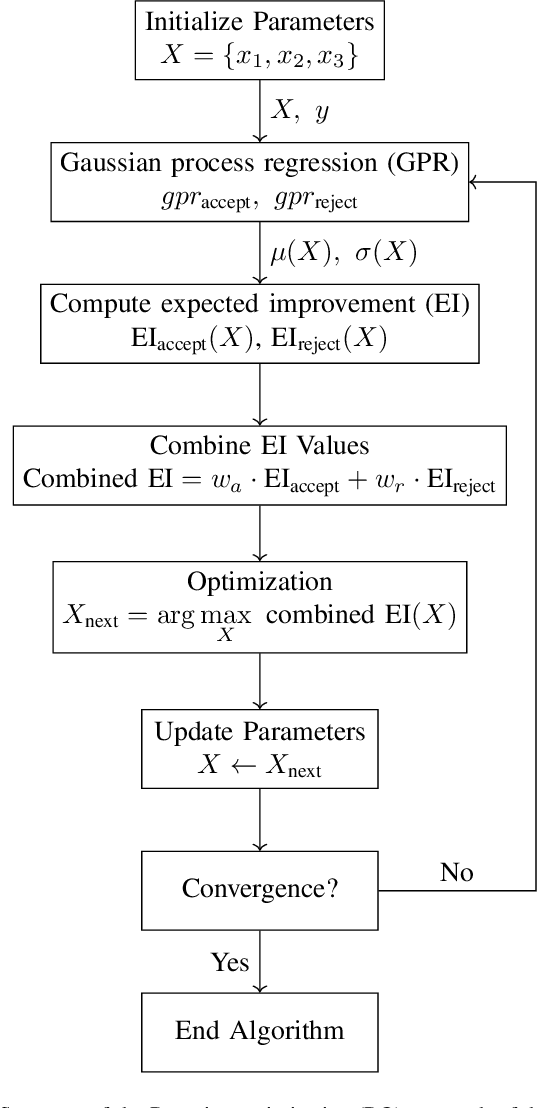
Sensor-based sorting systems enable the physical separation of a material stream into two fractions. The sorting decision is based on the image data evaluation of the sensors used and is carried out using actuators. Various process parameters must be set depending on the properties of the material stream, the dimensioning of the system, and the required sorting accuracy. However, continuous verification and re-adjustment are necessary due to changing requirements and material stream compositions. In this paper, we introduce an approach for optimizing, recurrently monitoring and adjusting the process parameters of a sensor-based sorting system. Based on Bayesian Optimization, Gaussian process regression models are used as surrogate models to achieve specific requirements for system behavior with the uncertainties contained therein. This method minimizes the number of necessary experiments while simultaneously considering two possible optimization targets based on the requirements for both material output streams. In addition, uncertainties are considered during determining sorting accuracies in the model calculation. We evaluated the method with three example process parameters.
Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight
Jul 12, 2023Autonomous, agile quadrotor flight raises fundamental challenges for robotics research in terms of perception, planning, learning, and control. A versatile and standardized platform is needed to accelerate research and let practitioners focus on the core problems. To this end, we present Agilicious, a co-designed hardware and software framework tailored to autonomous, agile quadrotor flight. It is completely open-source and open-hardware and supports both model-based and neural-network--based controllers. Also, it provides high thrust-to-weight and torque-to-inertia ratios for agility, onboard vision sensors, GPU-accelerated compute hardware for real-time perception and neural-network inference, a real-time flight controller, and a versatile software stack. In contrast to existing frameworks, Agilicious offers a unique combination of flexible software stack and high-performance hardware. We compare Agilicious with prior works and demonstrate it on different agile tasks, using both model-based and neural-network--based controllers. Our demonstrators include trajectory tracking at up to 5g and 70 km/h in a motion-capture system, and vision-based acrobatic flight and obstacle avoidance in both structured and unstructured environments using solely onboard perception. Finally, we demonstrate its use for hardware-in-the-loop simulation in virtual-reality environments. Thanks to its versatility, we believe that Agilicious supports the next generation of scientific and industrial quadrotor research.
* 14 pages, 5 figures, 2 tables