 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Multi-Robot Coordination and Cooperation with Task Precedence Relationships
Sep 18, 2025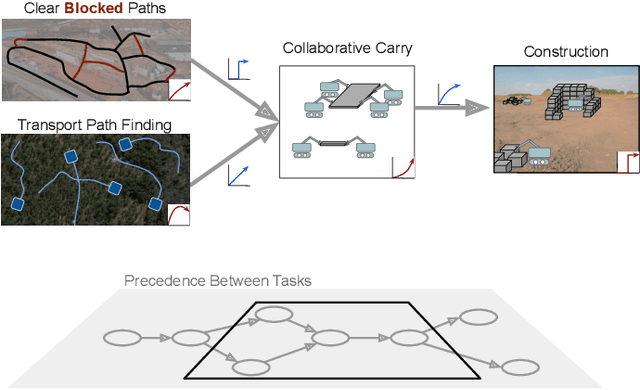
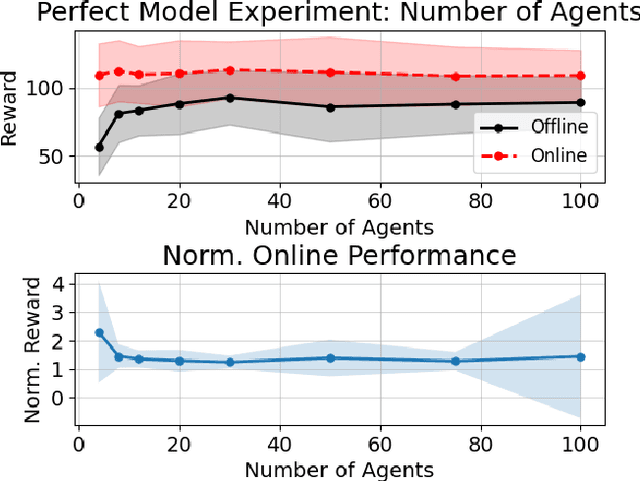
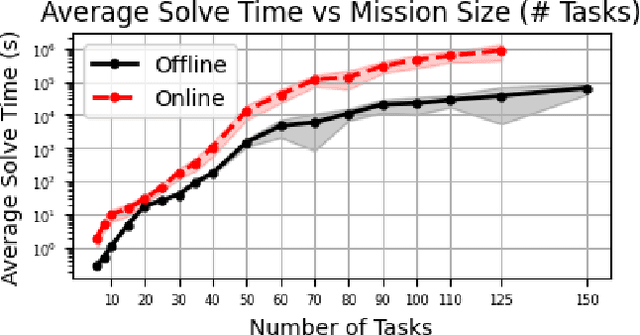
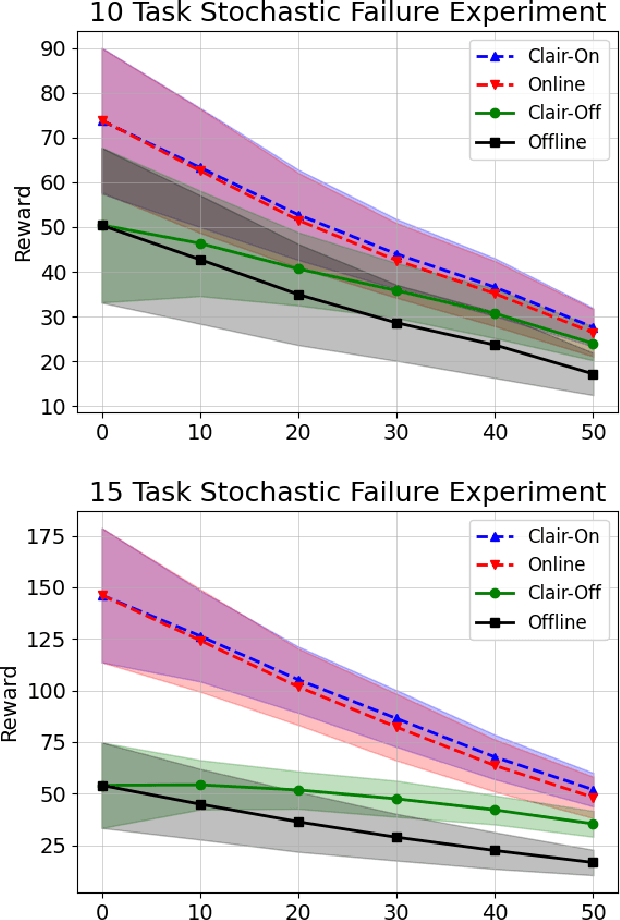
We propose a new formulation for the multi-robot task allocation problem that incorporates (a) complex precedence relationships between tasks, (b) efficient intra-task coordination, and (c) cooperation through the formation of robot coalitions. A task graph specifies the tasks and their relationships, and a set of reward functions models the effects of coalition size and preceding task performance. Maximizing task rewards is NP-hard; hence, we propose network flow-based algorithms to approximate solutions efficiently. A novel online algorithm performs iterative re-allocation, providing robustness to task failures and model inaccuracies to achieve higher performance than offline approaches. We comprehensively evaluate the algorithms in a testbed with random missions and reward functions and compare them to a mixed-integer solver and a greedy heuristic. Additionally, we validate the overall approach in an advanced simulator, modeling reward functions based on realistic physical phenomena and executing the tasks with realistic robot dynamics. Results establish efficacy in modeling complex missions and efficiency in generating high-fidelity task plans while leveraging task relationships.
Beyond Jacobian-based tasks: Extended set-based tasks for multi-task execution and prioritization
Oct 24, 2023



The ability of executing multiple tasks simultaneously is an important feature of redundant robotic systems. As a matter of fact, complex behaviors can often be obtained as a result of the execution of several tasks. Moreover, in safety-critical applications, tasks designed to ensure the safety of the robot and its surroundings have to be executed along with other nominal tasks. In such cases, it is also important to prioritize the former over the latter. In this paper, we formalize the definition of extended set-based tasks, i.e., tasks which can be executed by rendering subsets of the task space asymptotically stable or forward invariant. We propose a mathematical representation of such tasks that allows for the execution of more complex and time-varying prioritized stacks of tasks using kinematic and dynamic robot models alike. We present and analyze an optimization-based framework which is computationally efficient, accounts for input bounds, and allows for the stable execution of time-varying prioritized stacks of extended set-based tasks. The proposed framework is validated using extensive simulations and experiments with robotic manipulators.
Learning to Navigate in Turbulent Flows with Aerial Robot Swarms: A Cooperative Deep Reinforcement Learning Approach
Jun 07, 2023Aerial operation in turbulent environments is a challenging problem due to the chaotic behavior of the flow. This problem is made even more complex when a team of aerial robots is trying to achieve coordinated motion in turbulent wind conditions. In this paper, we present a novel multi-robot controller to navigate in turbulent flows, decoupling the trajectory-tracking control from the turbulence compensation via a nested control architecture. Unlike previous works, our method does not learn to compensate for the air-flow at a specific time and space. Instead, our method learns to compensate for the flow based on its effect on the team. This is made possible via a deep reinforcement learning approach, implemented via a Graph Convolutional Neural Network (GCNN)-based architecture, which enables robots to achieve better wind compensation by processing the spatial-temporal correlation of wind flows across the team. Our approach scales well to large robot teams -- as each robot only uses information from its nearest neighbors -- , and generalizes well to robot teams larger than seen in training. Simulated experiments demonstrate how information sharing improves turbulence compensation in a team of aerial robots and demonstrate the flexibility of our method over different team configurations.
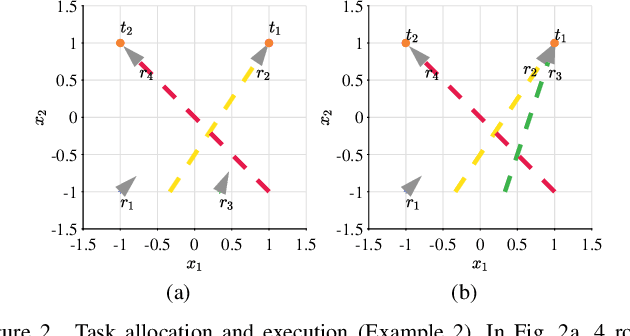
Multi-Robot Coordination and Cooperation with Task Precedence Relationships
Sep 28, 2022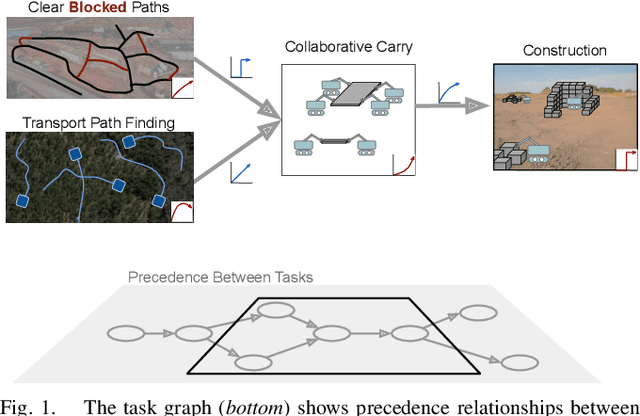

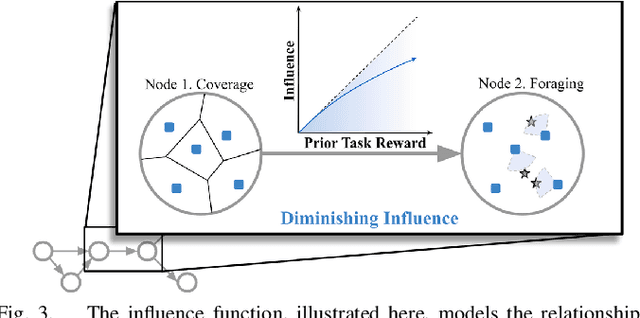
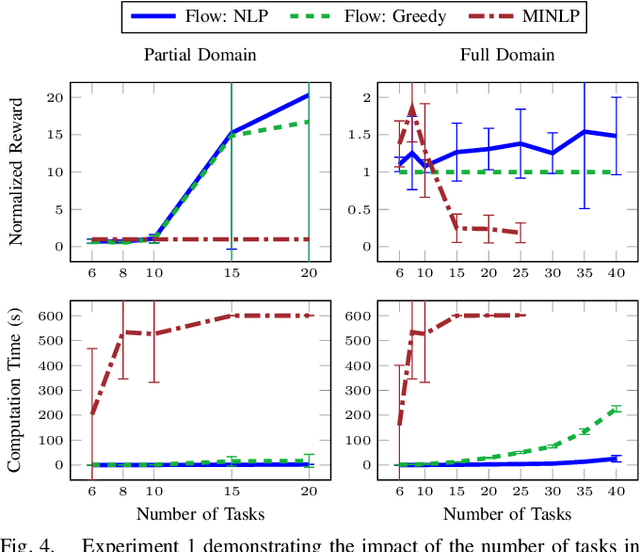
We propose a new formulation for the multi-robot task planning and allocation problem that incorporates (a) precedence relationships between tasks; (b) coordination for tasks allowing multiple robots to achieve increased efficiency; and (c) cooperation through the formation of robot coalitions for tasks that cannot be performed by individual robots alone. In our formulation, the tasks and the relationships between the tasks are specified by a task graph. We define a set of reward functions over the task graph's nodes and edges. These functions model the effect of robot coalition size on the task performance, and incorporate the influence of one task's performance on a dependent task. Solving this problem optimally is NP-hard. However, using the task graph formulation allows us to leverage min-cost network flow approaches to obtain approximate solutions efficiently. Additionally, we explore a mixed integer programming approach, which gives optimal solutions for small instances of the problem but is computationally expensive. We also develop a greedy heuristic algorithm as a baseline. Our modeling and solution approaches result in task plans that leverage task precedence relationships and robot coordination and cooperation to achieve high mission performance, even in large missions with many agents.
What Can Robots Teach Us About The COVID-19 Pandemic? Interactive Demonstrations of Epidemiological Models Using a Swarm of Brushbots
Jun 15, 2022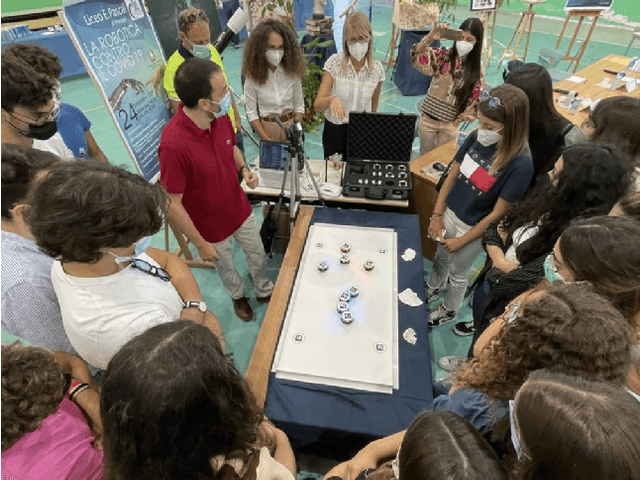
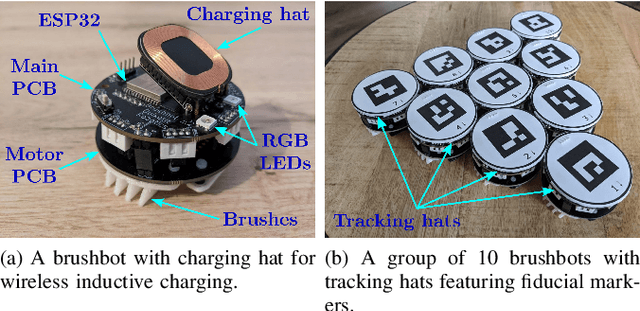
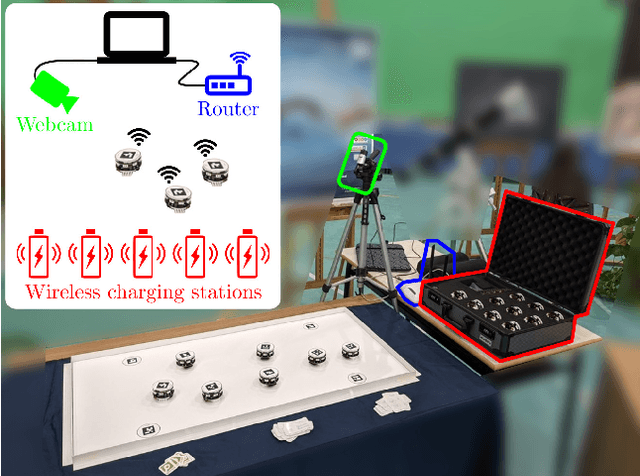
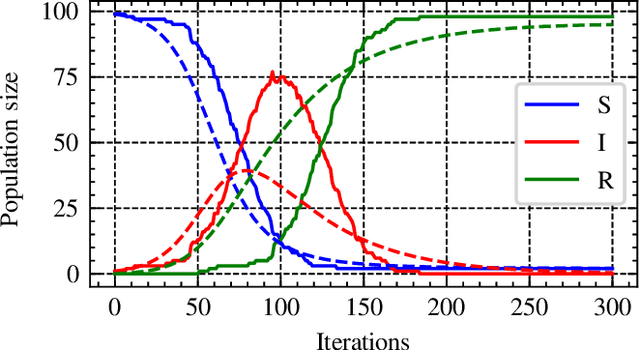
This paper describes the methodology and outcomes of a series of educational events conducted in 2021 which leveraged robot swarms to educate high-school and university students about epidemiological models and how they can inform societal and governmental policies. With a specific focus on the COVID-19 pandemic, the events consisted of 4 online and 3 in-person workshops where students had the chance to interact with a swarm of 20 custom-built brushbots -- small-scale vibration-driven robots optimized for portability and robustness. Through the analysis of data collected during a post-event survey, this paper shows how the events positively impacted the students' views on the scientific method to guide real-world decision making, as well as their interest in robotics.
Coverage Control in Multi-Robot Systems via Graph Neural Networks
Sep 30, 2021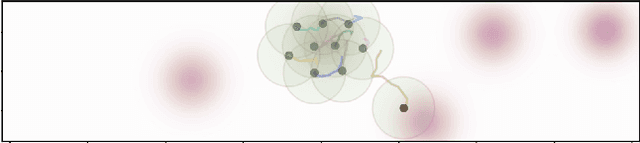
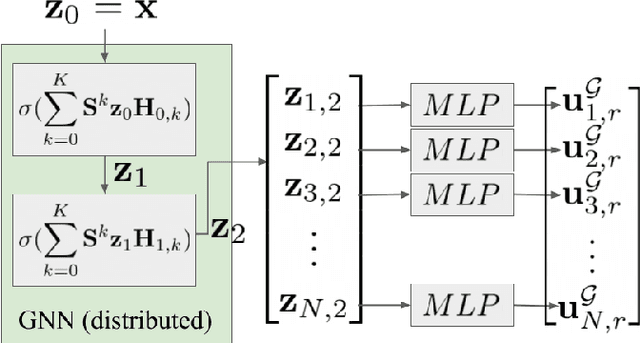
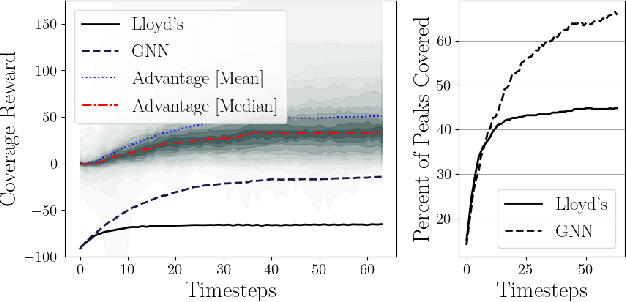
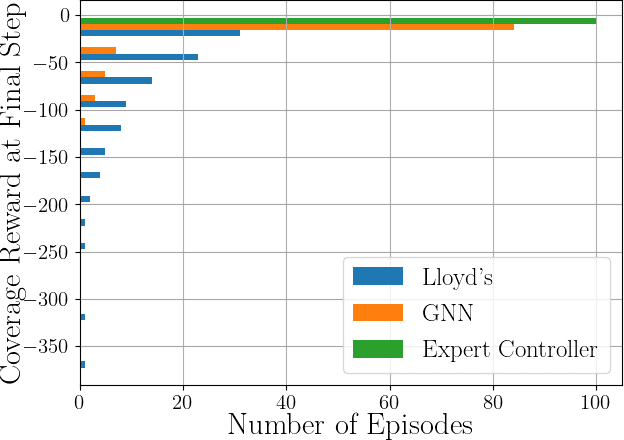
This paper develops a decentralized approach to mobile sensor coverage by a multi-robot system. We consider a scenario where a team of robots with limited sensing range must position itself to effectively detect events of interest in a region characterized by areas of varying importance. Towards this end, we develop a decentralized control policy for the robots -- realized via a Graph Neural Network -- which uses inter-robot communication to leverage non-local information for control decisions. By explicitly sharing information between multi-hop neighbors, the decentralized controller achieves a higher quality of coverage when compared to classical approaches that do not communicate and leverage only local information available to each robot. Simulated experiments demonstrate the efficacy of multi-hop communication for multi-robot coverage and evaluate the scalability and transferability of the learning-based controllers.
A Resilient and Energy-Aware Task Allocation Framework for Heterogeneous Multi-Robot Systems
May 12, 2021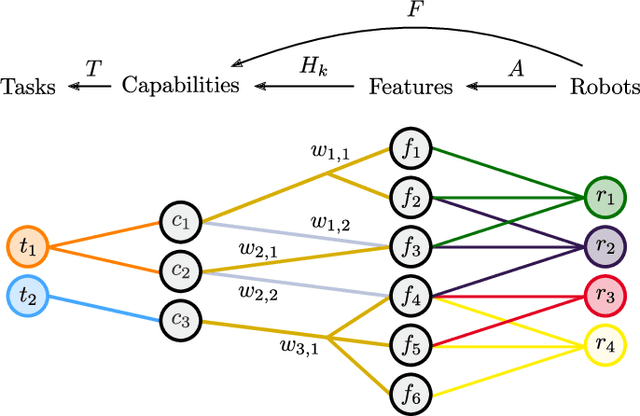
In the context of heterogeneous multi-robot teams deployed for executing multiple tasks, this paper develops an energy-aware framework for allocating tasks to robots in an online fashion. With a primary focus on long-duration autonomy applications, we opt for a survivability-focused approach. Towards this end, the task prioritization and execution -- through which the allocation of tasks to robots is effectively realized -- are encoded as constraints within an optimization problem aimed at minimizing the energy consumed by the robots at each point in time. In this context, an allocation is interpreted as a prioritization of a task over all others by each of the robots. Furthermore, we present a novel framework to represent the heterogeneous capabilities of the robots, by distinguishing between the features available on the robots, and the capabilities enabled by these features. By embedding these descriptions within the optimization problem, we make the framework resilient to situations where environmental conditions make certain features unsuitable to support a capability and when component failures on the robots occur. We demonstrate the efficacy and resilience of the proposed approach in a variety of use-case scenarios, consisting of simulations and real robot experiments.
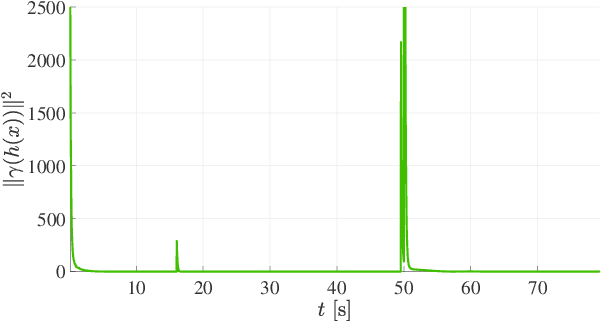
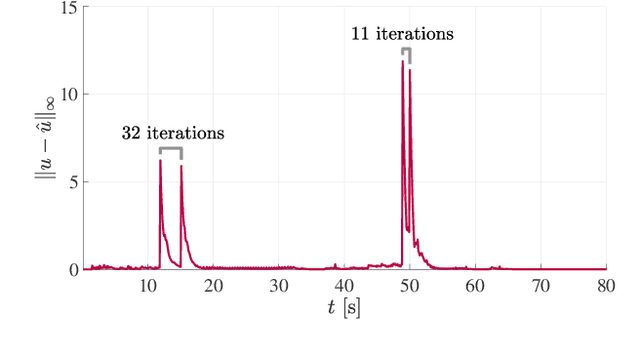
Adaptive and Risk-Aware Target Tracking with Heterogeneous Robot Teams
May 09, 2021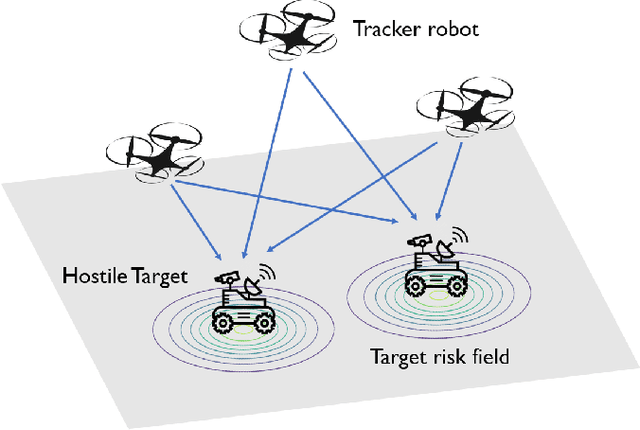
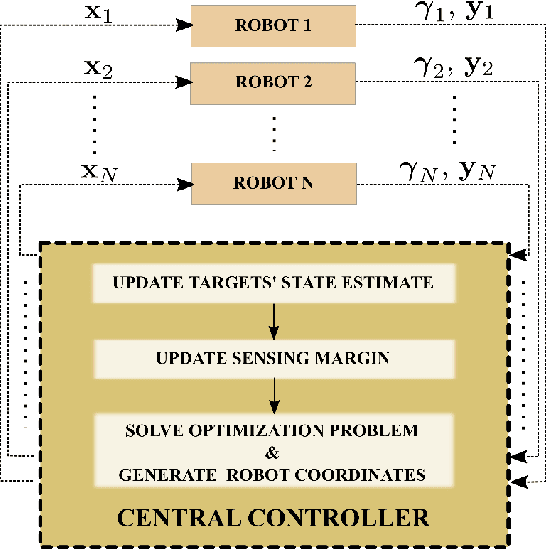
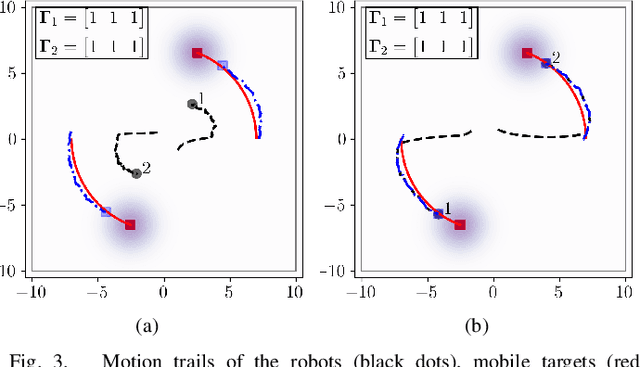
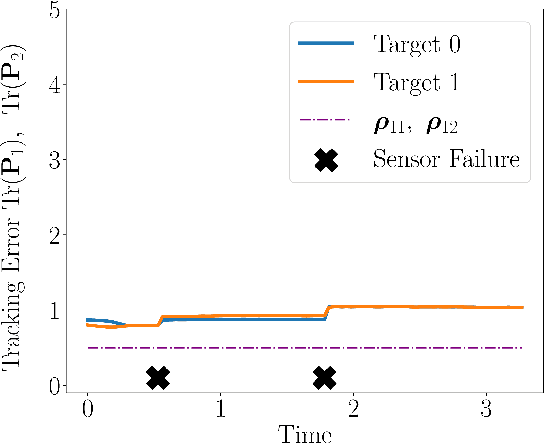
We consider a scenario where a team of robots with heterogeneous sensors must track a set of hostile targets which induce sensory failures on the robots. In particular, the likelihood of failures depends on the proximity between the targets and the robots. We propose a control framework that implicitly addresses the competing objectives of performance maximization and sensor preservation (which impacts the future performance of the team). Our framework consists of a predictive component -- which accounts for the risk of being detected by the target, and a reactive component -- which maximizes the performance of the team regardless of the failures that have already occurred. Based on a measure of the abundance of sensors in the team, our framework can generate aggressive and risk-averse robot configurations to track the targets. Crucially, the heterogeneous sensing capabilities of the robots are explicitly considered in each step, allowing for a more expressive risk-performance trade-off. Simulated experiments with induced sensor failures demonstrate the efficacy of the proposed approach.
Resilient Task Allocation in Heterogeneous Multi-Robot Systems
Sep 09, 2020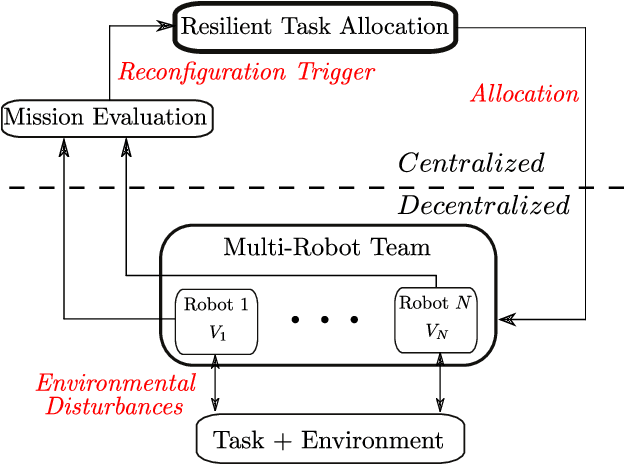
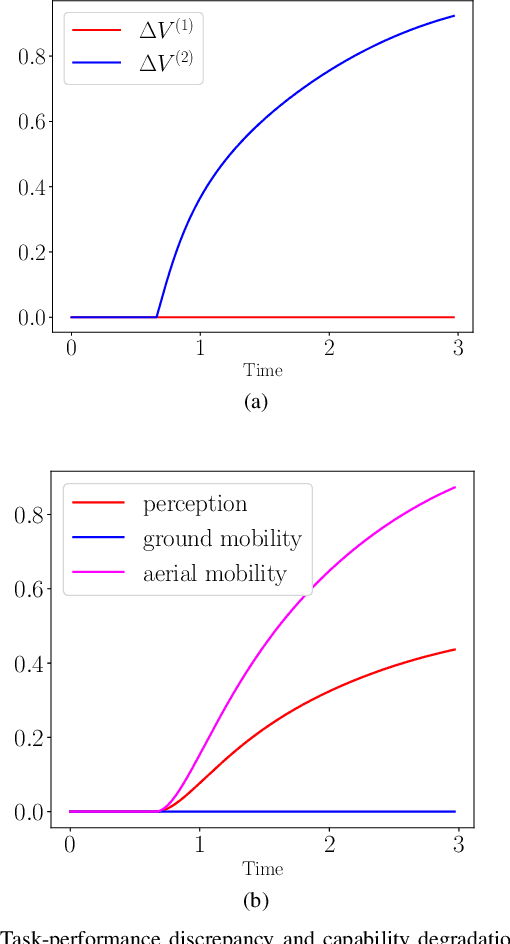
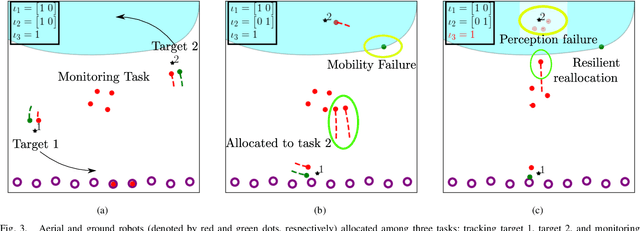
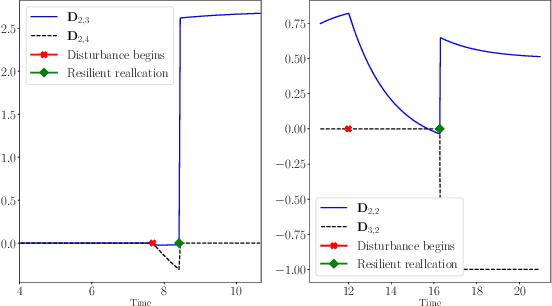
For a multi-robot system equipped with heterogeneous capabilities, this paper presents a mechanism to allocate robots to tasks in a resilient manner when anomalous environmental conditions such as weather events or adversarial attacks affect the performance of robots within the tasks. Our primary objective is to ensure that each task is assigned the requisite level of resources, measured as the aggregated capabilities of the robots allocated to the task. By keeping track of task performance deviations under external perturbations, our framework quantifies the extent to which robot capabilities (e.g., visual sensing or aerial mobility) are affected by environmental conditions. This enables an optimization-based framework to flexibly reallocate robots to tasks based on the most degraded capabilities within each task. In the face of resource limitations and adverse environmental conditions, our algorithm minimally relaxes the resource constraints corresponding to some tasks, thus exhibiting a graceful degradation of performance. Simulated experiments in a multi-robot coverage and target tracking scenario demonstrate the efficacy of the proposed approach.
Adaptive Task Allocation for Heterogeneous Multi-Robot Teams with Evolving and Unknown Robot Capabilities
Mar 06, 2020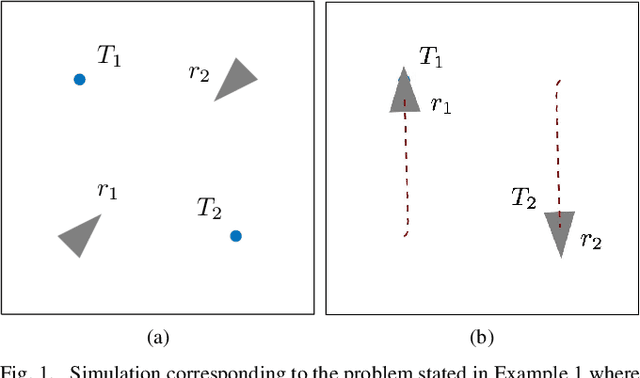
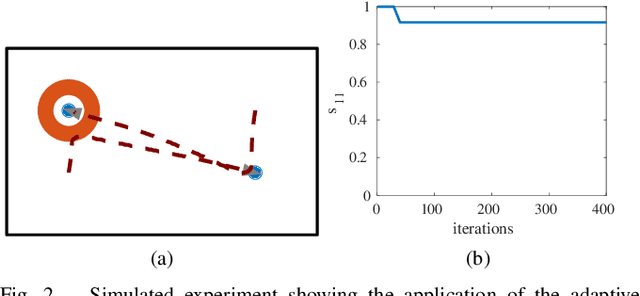
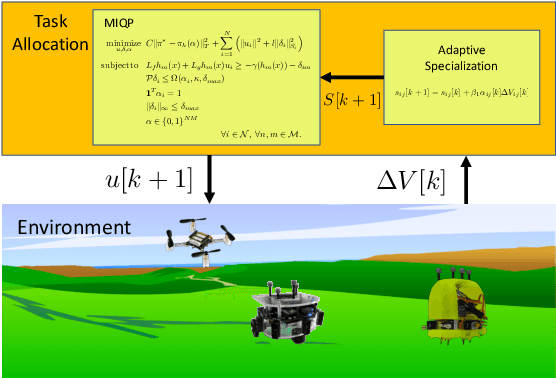
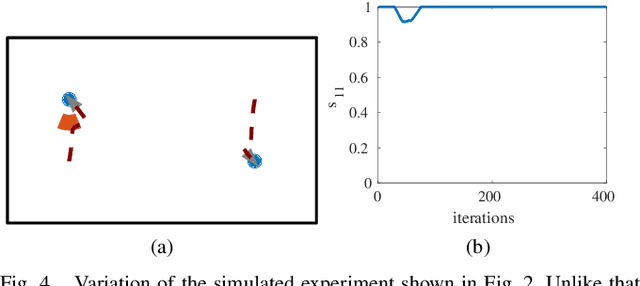
For multi-robot teams with heterogeneous capabilities, typical task allocation methods assign tasks to robots based on the suitability of the robots to perform certain tasks as well as the requirements of the task itself. However, in real-world deployments of robot teams, the suitability of a robot might be unknown prior to deployment, or might vary due to changing environmental conditions. This paper presents an adaptive task allocation and task execution framework which allows individual robots to prioritize among tasks while explicitly taking into account their efficacy at performing the tasks---the parameters of which might be unknown before deployment and/or might vary over time. Such a \emph{specialization} parameter---encoding the effectiveness of a given robot towards a task---is updated on-the-fly, allowing our algorithm to reassign tasks among robots with the aim of executing them. The developed framework requires no explicit model of the changing environment or of the unknown robot capabilities---it only takes into account the progress made by the robots at completing the tasks. Simulations and experiments demonstrate the efficacy of the proposed approach during variations in environmental conditions and when robot capabilities are unknown before deployment.