 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Critical LiDAR-Inertial Odometry with On-Manifold Deterministic Protection Level
May 10, 2026In safety-critical scenarios, the protection level of the autonomous navigation system is crucial for enabling mobile robots to perform safe tasks. However, existing studies on probabilistic navigation systems for robots usually perform offline accuracy evaluations using limited datasets and assume that the results can be applied to unknown real-world environments. As a result, current autonomous mobile robots often lack protection levels for online safety assessment. To fill this gap, we propose a safety-critical LiDAR-inertial odometry (LIO) that provides deterministic protection levels based on on-manifold deterministic state estimation. By adopting the unknown but bounded assumption, we derive a neat closed-form relationship between point cloud noise and the uncertainty of the estimation from the iterated closest point algorithm. Using this relationship, we design an on-manifold ellipsoidal set-membership filter and implement it within the LIO system. Leveraging the properties of the set-membership filter, our system offers the feasible sets of the estimated locations as the deterministic protection levels, serving as safety references for the robots' downstream autonomous operations. The experimental results show that our system can provide effective deterministic online safety references for diverse robots in various environments.
Autonomous UAV Pipeline Near-proximity Inspection via Disturbance-Aware Predictive Visual Servoing
Apr 21, 2026Reliable pipeline inspection is critical to safe energy transportation, but is constrained by long distances, complex terrain, and risks to human inspectors. Unmanned aerial vehicles provide a flexible sensing platform, yet reliable autonomous inspection remains challenging. This paper presents an autonomous quadrotor near-proximity pipeline inspection framework for three-dimensional scenarios based on image-based visual servoing model predictive control (VMPC). A unified predictive model couples quadrotor dynamics with image feature kinematics, enabling direct image-space prediction within the control loop. To address low-rate visual updates, measurement noise, and environmental uncertainties, an extended-state Kalman filtering scheme with image feature prediction (ESKF-PRE) is developed, and the estimated lumped disturbances are incorporated into the VMPC prediction model, yielding the ESKF-PRE-VMPC framework. A terrain-adaptive velocity design is introduced to maintain the desired cruising speed while generating vertical velocity references over unknown terrain slopes without prior terrain information. The framework is validated in high-fidelity Gazebo simulations and real-world experiments. In real-world tests, the proposed method reduces RMSE by 52.63% and 75.04% in pipeline orientation and lateral deviation in the image, respectively, for straight-pipeline inspection without wind, and successfully completes both wind-disturbance and bend-pipeline tasks where baseline method fails. An open-source nano quadrotor is modified for indoor experimentation.
MPC as a Copilot: A Predictive Filter Framework with Safety and Stability Guarantees
Mar 29, 2026Ensuring both safety and stability remains a fundamental challenge in learning-based control, where goal-oriented policies often neglect system constraints and closed-loop state convergence. To address this limitation, this paper introduces the Predictive Safety--Stability Filter (PS2F), a unified predictive filter framework that guarantees constraint satisfaction and asymptotic stability within a single architecture. The PS2F framework comprises two cascaded optimal control problems: a nominal model predictive control (MPC) layer that serves solely as a copilot, implicitly defining a Lyapunov function and generating safety- and stability-certified predicted trajectories, and a secondary filtering layer that adjusts external command to remain within a provably safe and stable region. This cascaded structure enables PS2F to inherit the theoretical guarantees of nominal MPC while accommodating goal-oriented external commands. Rigorous analysis establishes recursive feasibility and asymptotic stability of the closed-loop system without introducing additional conservatism beyond that associated with the nominal MPC. Furthermore, a time-varying parameterisation allows PS2F to transition smoothly between safety-prioritised and stability-oriented operation modes, providing a principled mechanism for balancing exploration and exploitation. The effectiveness of the proposed framework is demonstrated through comparative numerical experiments.
LEFT: Learnable Fusion of Tri-view Tokens for Unsupervised Time Series Anomaly Detection
Feb 09, 2026As a fundamental data mining task, unsupervised time series anomaly detection (TSAD) aims to build a model for identifying abnormal timestamps without assuming the availability of annotations. A key challenge in unsupervised TSAD is that many anomalies are too subtle to exhibit detectable deviation in any single view (e.g., time domain), and instead manifest as inconsistencies across multiple views like time, frequency, and a mixture of resolutions. However, most cross-view methods rely on feature or score fusion and do not enforce analysis-synthesis consistency, meaning the frequency branch is not required to reconstruct the time signal through an inverse transform, and vice versa. In this paper, we present Learnable Fusion of Tri-view Tokens (LEFT), a unified unsupervised TSAD framework that models anomalies as inconsistencies across complementary representations. LEFT learns feature tokens from three views of the same input time series: frequency-domain tokens that embed periodicity information, time-domain tokens that capture local dynamics, and multi-scale tokens that learns abnormal patterns at varying time series granularities. By learning a set of adaptive Nyquist-constrained spectral filters, the original time series is rescaled into multiple resolutions and then encoded, allowing these multi-scale tokens to complement the extracted frequency- and time-domain information. When generating the fused representation, we introduce a novel objective that reconstructs fine-grained targets from coarser multi-scale structure, and put forward an innovative time-frequency cycle consistency constraint to explicitly regularize cross-view agreement. Experiments on real-world benchmarks show that LEFT yields the best detection accuracy against SOTA baselines, while achieving a 5x reduction on FLOPs and 8x speed-up for training.
Fine-Tuning Flow Matching via Maximum Likelihood Estimation of Reconstructions
Oct 02, 2025



Flow Matching (FM) algorithm achieves remarkable results in generative tasks especially in robotic manipulation. Building upon the foundations of diffusion models, the simulation-free paradigm of FM enables simple and efficient training, but inherently introduces a train-inference gap. Specifically, we cannot assess the model's output during the training phase. In contrast, other generative models including Variational Autoencoder (VAE), Normalizing Flow and Generative Adversarial Networks (GANs) directly optimize on the reconstruction loss. Such a gap is particularly evident in scenarios that demand high precision, such as robotic manipulation. Moreover, we show that FM's over-pursuit of straight predefined paths may introduce some serious problems such as stiffness into the system. These motivate us to fine-tune FM via Maximum Likelihood Estimation of reconstructions - an approach made feasible by FM's underlying smooth ODE formulation, in contrast to the stochastic differential equations (SDEs) used in diffusion models. This paper first theoretically analyzes the relation between training loss and inference error in FM. Then we propose a method of fine-tuning FM via Maximum Likelihood Estimation of reconstructions, which includes both straightforward fine-tuning and residual-based fine-tuning approaches. Furthermore, through specifically designed architectures, the residual-based fine-tuning can incorporate the contraction property into the model, which is crucial for the model's robustness and interpretability. Experimental results in image generation and robotic manipulation verify that our method reliably improves the inference performance of FM.
Learning and Current Prediction of PMSM Drive via Differential Neural Networks
Dec 12, 2024Learning models for dynamical systems in continuous time is significant for understanding complex phenomena and making accurate predictions. This study presents a novel approach utilizing differential neural networks (DNNs) to model nonlinear systems, specifically permanent magnet synchronous motors (PMSMs), and to predict their current trajectories. The efficacy of our approach is validated through experiments conducted under various load disturbances and no-load conditions. The results demonstrate that our method effectively and accurately reconstructs the original systems, showcasing strong short-term and long-term prediction capabilities and robustness. This study provides valuable insights into learning the inherent dynamics of complex dynamical data and holds potential for further applications in fields such as weather forecasting, robotics, and collective behavior analysis.
ICODE: Modeling Dynamical Systems with Extrinsic Input Information
Nov 21, 2024



Learning models of dynamical systems with external inputs, that may be, for example, nonsmooth or piecewise, is crucial for studying complex phenomena and predicting future state evolution, which is essential for applications such as safety guarantees and decision-making. In this work, we introduce \emph{Input Concomitant Neural ODEs (ICODEs)}, which incorporate precise real-time input information into the learning process of the models, rather than treating the inputs as hidden parameters to be learned. The sufficient conditions to ensure the model's contraction property are provided to guarantee that system trajectories of the trained model converge to a fixed point, regardless of initial conditions across different training processes. We validate our method through experiments on several representative real dynamics: Single-link robot, DC-to-DC converter, motion dynamics of a rigid body, Rabinovich-Fabrikant equation, Glycolytic-glycogenolytic pathway model, and heat conduction equation. The experimental results demonstrate that our proposed ICODEs efficiently learn the ground truth systems, achieving superior prediction performance under both typical and atypical inputs. This work offers a valuable class of neural ODE models for understanding physical systems with explicit external input information, with potential promising applications in fields such as physics and robotics.
ControlSynth Neural ODEs: Modeling Dynamical Systems with Guaranteed Convergence
Nov 04, 2024



Neural ODEs (NODEs) are continuous-time neural networks (NNs) that can process data without the limitation of time intervals. They have advantages in learning and understanding the evolution of complex real dynamics. Many previous works have focused on NODEs in concise forms, while numerous physical systems taking straightforward forms, in fact, belong to their more complex quasi-classes, thus appealing to a class of general NODEs with high scalability and flexibility to model those systems. This, however, may result in intricate nonlinear properties. In this paper, we introduce ControlSynth Neural ODEs (CSODEs). We show that despite their highly nonlinear nature, convergence can be guaranteed via tractable linear inequalities. In the composition of CSODEs, we introduce an extra control term for learning the potential simultaneous capture of dynamics at different scales, which could be particularly useful for partial differential equation-formulated systems. Finally, we compare several representative NNs with CSODEs on important physical dynamics under the inductive biases of CSODEs, and illustrate that CSODEs have better learning and predictive abilities in these settings.
Flexible Active Safety Motion Control for Robotic Obstacle Avoidance: A CBF-Guided MPC Approach
May 20, 2024



A flexible active safety motion (FASM) control approach is proposed for the avoidance of dynamic obstacles and the reference tracking in robot manipulators. The distinctive feature of the proposed method lies in its utilization of control barrier functions (CBF) to design flexible CBF-guided safety criteria (CBFSC) with dynamically optimized decay rates, thereby offering flexibility and active safety for robot manipulators in dynamic environments. First, discrete-time CBFs are employed to formulate the novel flexible CBFSC with dynamic decay rates for robot manipulators. Following that, the model predictive control (MPC) philosophy is applied, integrating flexible CBFSC as safety constraints into the receding-horizon optimization problem. Significantly, the decay rates of the designed CBFSC are incorporated as decision variables in the optimization problem, facilitating the dynamic enhancement of flexibility during the obstacle avoidance process. In particular, a novel cost function that integrates a penalty term is designed to dynamically adjust the safety margins of the CBFSC. Finally, experiments are conducted in various scenarios using a Universal Robots 5 (UR5) manipulator to validate the effectiveness of the proposed approach.
Guarding Force: Safety-Critical Compliant Control for Robot-Environment Interaction
May 08, 2024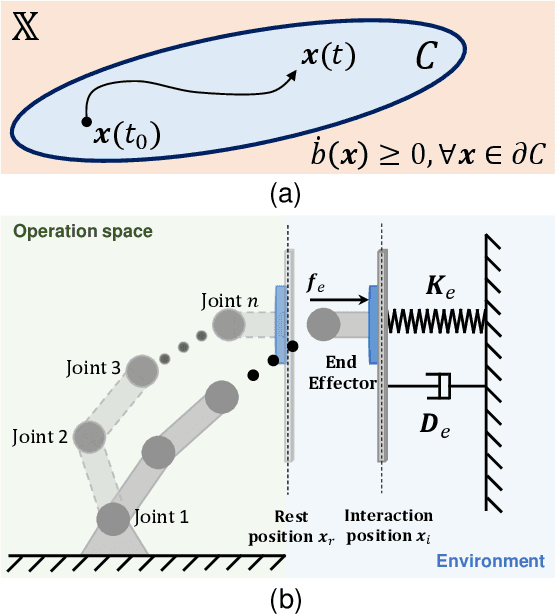
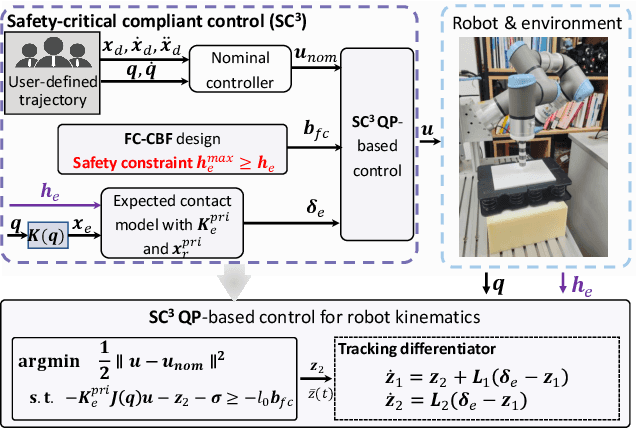
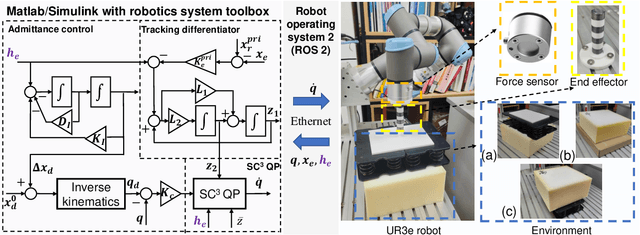
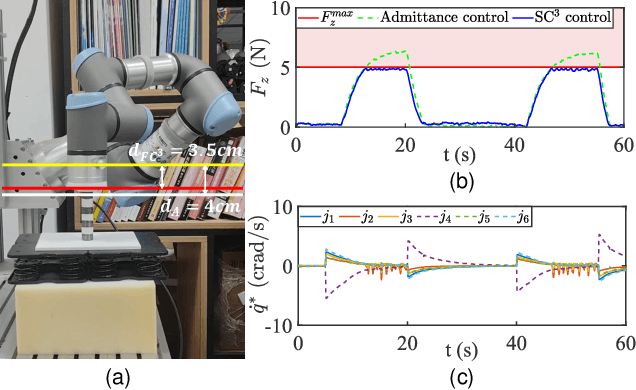
In this study, we propose a safety-critical compliant control strategy designed to strictly enforce interaction force constraints during the physical interaction of robots with unknown environments. The interaction force constraint is interpreted as a new force-constrained control barrier function (FC-CBF) by exploiting the generalized contact model and the prior information of the environment, i.e., the prior stiffness and rest position, for robot kinematics. The difference between the real environment and the generalized contact model is approximated by constructing a tracking differentiator, and its estimation error is quantified based on Lyapunov theory. By interpreting strict interaction safety specification as a dynamic constraint, restricting the desired joint angular rates in kinematics, the proposed approach modifies nominal compliant controllers using quadratic programming, ensuring adherence to interaction force constraints in unknown environments. The strict force constraint and the stability of the closed-loop system are rigorously analyzed. Experimental tests using a UR3e industrial robot with different environments verify the effectiveness of the proposed method in achieving the force constraints in unknown environments.