 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMPC as a Copilot: A Predictive Filter Framework with Safety and Stability Guarantees
Mar 29, 2026Ensuring both safety and stability remains a fundamental challenge in learning-based control, where goal-oriented policies often neglect system constraints and closed-loop state convergence. To address this limitation, this paper introduces the Predictive Safety--Stability Filter (PS2F), a unified predictive filter framework that guarantees constraint satisfaction and asymptotic stability within a single architecture. The PS2F framework comprises two cascaded optimal control problems: a nominal model predictive control (MPC) layer that serves solely as a copilot, implicitly defining a Lyapunov function and generating safety- and stability-certified predicted trajectories, and a secondary filtering layer that adjusts external command to remain within a provably safe and stable region. This cascaded structure enables PS2F to inherit the theoretical guarantees of nominal MPC while accommodating goal-oriented external commands. Rigorous analysis establishes recursive feasibility and asymptotic stability of the closed-loop system without introducing additional conservatism beyond that associated with the nominal MPC. Furthermore, a time-varying parameterisation allows PS2F to transition smoothly between safety-prioritised and stability-oriented operation modes, providing a principled mechanism for balancing exploration and exploitation. The effectiveness of the proposed framework is demonstrated through comparative numerical experiments.
Redundant Observer-Based Tracking Control for Object Extraction Using a Cable Connected UAV
Oct 31, 2024



A new disturbance observer based control scheme is developed for a quadrotor under the concurrent disturbances from a lightweight elastic tether cable and a lumped vertical disturbance. This elastic tether is unusual as it creates a disturbance proportional to the multicopter's translational movement. This paper takes an observer-based approach to estimate the stiffness coefficient of the cable and uses the system model to update the estimates of the external forces, which are then compensated in the control action. Given that the tethered cable force affects both horizontal channels of the quadrotor and is also coupled with the vertical channel, the proposed disturbance observer is constructed to exploit the redundant measurements across all three channels to jointly estimate the cable stiffness and the vertical disturbance. A pseudo-inverse method is used to determine the observer gain functions, such that the estimation of the two quantities is decoupled and stable. Compared to standard disturbance observers which assume nearly constant disturbances, the proposed approach can quickly adjust its total force estimate as the tethered quadrotor changes its position or tautness of the tether. This is applied to two experiments - a tracking performance test where the multicopter moves under a constant tether strain, and an object extraction test. In the second test, the multicopter manipulates a nonlinear mechanism mimicking the extraction of a wedged object. In both cases, the proposed approach shows significant improvement over standard Disturbance Observer and Extended State Observer approaches. A video summary of the experiments can be found at https://youtu.be/9gKr13WTj-k.
Guarding Force: Safety-Critical Compliant Control for Robot-Environment Interaction
May 08, 2024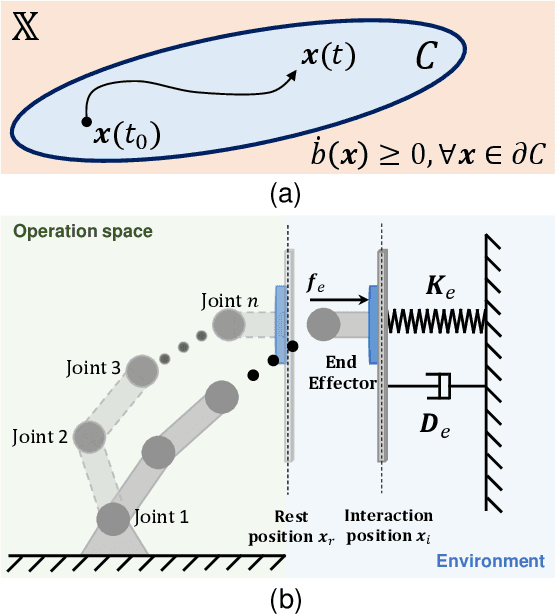
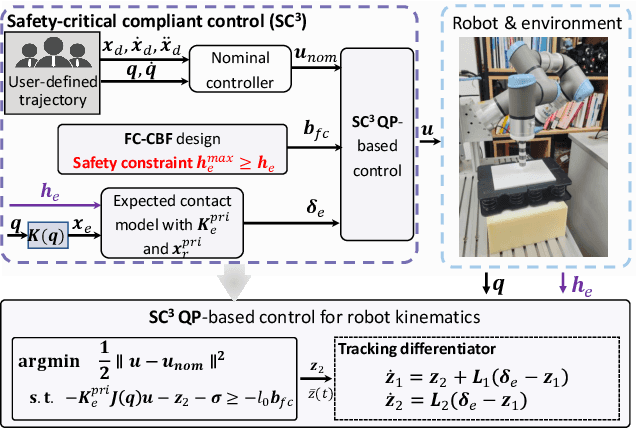
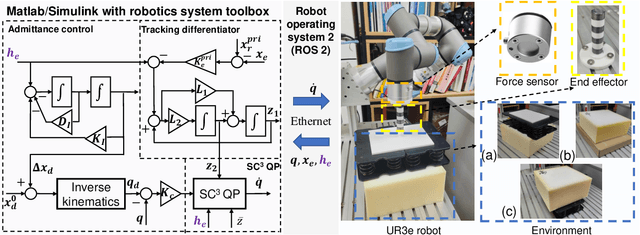
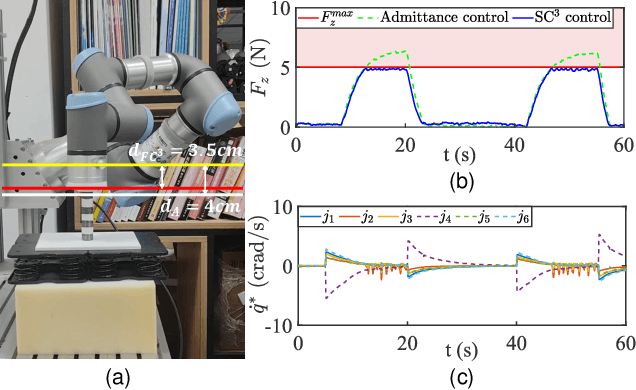
In this study, we propose a safety-critical compliant control strategy designed to strictly enforce interaction force constraints during the physical interaction of robots with unknown environments. The interaction force constraint is interpreted as a new force-constrained control barrier function (FC-CBF) by exploiting the generalized contact model and the prior information of the environment, i.e., the prior stiffness and rest position, for robot kinematics. The difference between the real environment and the generalized contact model is approximated by constructing a tracking differentiator, and its estimation error is quantified based on Lyapunov theory. By interpreting strict interaction safety specification as a dynamic constraint, restricting the desired joint angular rates in kinematics, the proposed approach modifies nominal compliant controllers using quadratic programming, ensuring adherence to interaction force constraints in unknown environments. The strict force constraint and the stability of the closed-loop system are rigorously analyzed. Experimental tests using a UR3e industrial robot with different environments verify the effectiveness of the proposed method in achieving the force constraints in unknown environments.