 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDV-World: Benchmarking Data Visualization Agents in Real-World Scenarios
Apr 28, 2026Real-world data visualization (DV) requires native environmental grounding, cross-platform evolution, and proactive intent alignment. Yet, existing benchmarks often suffer from code-sandbox confinement, single-language creation-only tasks, and assumption of perfect intent. To bridge these gaps, we introduce DV-World, a benchmark of 260 tasks designed to evaluate DV agents across real-world professional lifecycles. DV-World spans three domains: DV-Sheet for native spreadsheet manipulation including chart and dashboard creation as well as diagnostic repair; DV-Evolution for adapting and restructuring reference visual artifacts to fit new data across diverse programming paradigms and DV-Interact for proactive intent alignment with a user simulator that mimics real-world ambiguous requirements. Our hybrid evaluation framework integrates Table-value Alignment for numerical precision and MLLM-as-a-Judge with rubrics for semantic-visual assessment. Experiments reveal that state-of-the-art models achieve less than 50% overall performance, exposing critical deficits in handling the complex challenges of real-world data visualization. DV-World provides a realistic testbed to steer development toward the versatile expertise required in enterprise workflows. Our data and code are available at \href{https://github.com/DA-Open/DV-World}{this project page}.
MMR-Life: Piecing Together Real-life Scenes for Multimodal Multi-image Reasoning
Mar 02, 2026Recent progress in the reasoning capabilities of multimodal large language models (MLLMs) has empowered them to address more complex tasks such as scientific analysis and mathematical reasoning. Despite their promise, MLLMs' reasoning abilities across different scenarios in real life remain largely unexplored and lack standardized benchmarks for evaluation. To address this gap, we introduce MMR-Life, a comprehensive benchmark designed to evaluate the diverse multimodal multi-image reasoning capabilities of MLLMs across real-life scenarios. MMR-Life consists of 2,646 multiple-choice questions based on 19,108 images primarily sourced from real-world contexts, comprehensively covering seven reasoning types: abductive, analogical, causal, deductive, inductive, spatial, and temporal. Unlike existing reasoning benchmarks, MMR-Life does not rely on domain-specific expertise but instead requires models to integrate information across multiple images and apply diverse reasoning abilities. The evaluation of 37 advanced models highlights the substantial challenge posed by MMR-Life. Even top models like GPT-5 achieve only 58% accuracy and display considerable variance in performance across reasoning types. Moreover, we analyze the reasoning paradigms of existing MLLMs, exploring how factors such as thinking length, reasoning method, and reasoning type affect their performance. In summary, MMR-Life establishes a comprehensive foundation for evaluating, analyzing, and improving the next generation of multimodal reasoning systems.
Robotic Electrospinning Actuated by Non-Circular Joint Continuum Manipulator for Endoluminal Therapy
Jun 07, 2021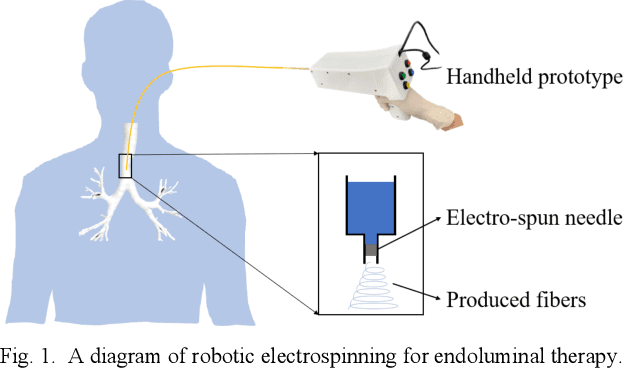
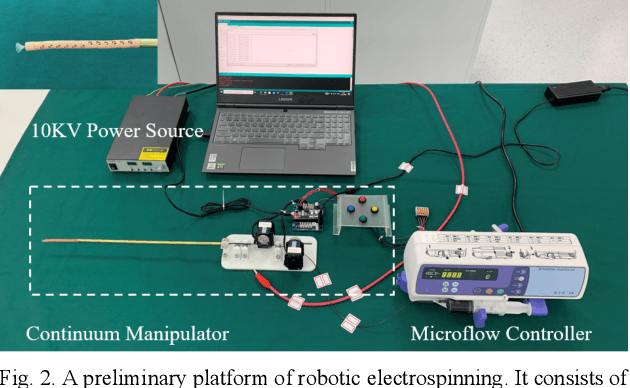
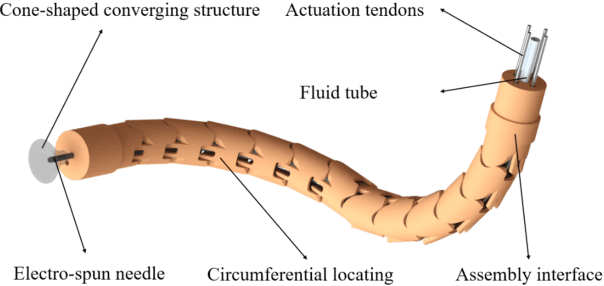
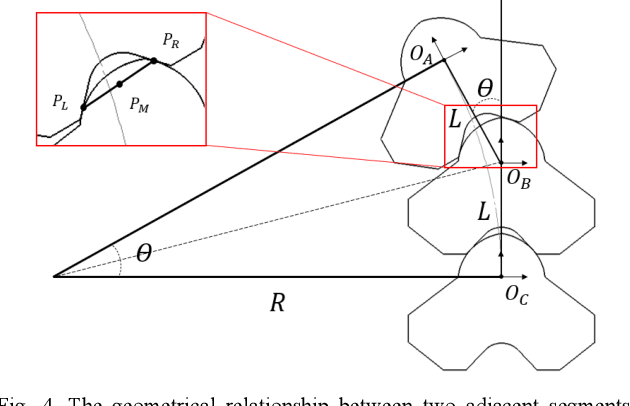
Electrospinning has exhibited excellent benefits to treat the trauma for tissue engineering due to its produced micro/nano fibrous structure. It can effectively adhere to the tissue surface for long-term continuous therapy. This paper develops a robotic electrospinning platform for endoluminal therapy. The platform consists of a continuum manipulator, the electrospinning device, and the actuation unit. The continuum manipulator has two bending sections to facilitate the steering of the tip needle for a controllable spinning direction. Non-circular joint profile is carefully designed to enable a constant length of the centreline of a continuum manipulator for stable fluid transmission inside it. Experiments are performed on a bronchus phantom, and the steering ability and bending limitation in each direction are also investigated. The endoluminal electrospinning is also fulfilled by a trajectory following and points targeting experiments. The effective adhesive area of the produced fibre is also illustrated. The proposed robotic electrospinning shows its feasibility to precisely spread more therapeutic drug to construct fibrous structure for potential endoluminal treatment.