 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
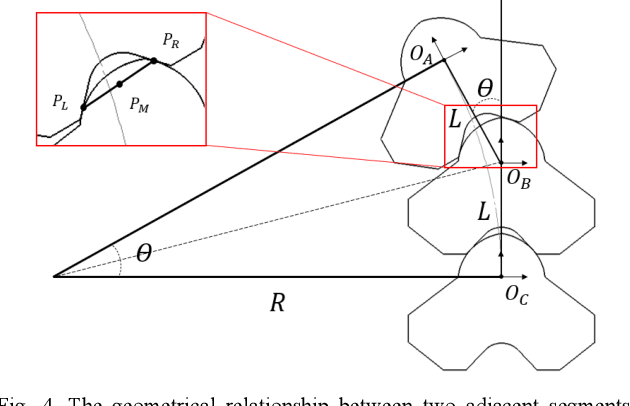
Add to EdgeBumper Drone: Elastic Morphology Design for Aerial Physical Interaction
Feb 21, 2026Aerial robots are evolving from avoiding obstacles to exploiting the environmental contact interactions for navigation, exploration and manipulation. A key challenge in such aerial physical interactions lies in handling uncertain contact forces on unknown targets, which typically demand accurate sensing and active control. We present a drone platform with elastic horns that enables touch-and-go manoeuvres - a self-regulated, consecutive bumping motion that allows the drone to maintain proximity to a wall without relying on active obstacle avoidance. It leverages environmental interaction as a form of embodied control, where low-level stabilisation and near-obstacle navigation emerge from the passive dynamic responses of the drone-obstacle system that resembles a mass-spring-damper system. Experiments show that the elastic horn can absorb impact energy while maintaining vehicle stability, reducing pitch oscillations by 38% compared to the rigid horn configuration. The lower horn arrangement was found to reduce pitch oscillations by approximately 54%. In addition to intermittent contact, the platform equipped with elastic horns also demonstrates stable, sustained contact with static objects, relying on a standard attitude PID controller.
Learning Agile Tensile Perching for Aerial Robots from Demonstrations
Jul 08, 2025Perching on structures such as trees, beams, and ledges is essential for extending the endurance of aerial robots by enabling energy conservation in standby or observation modes. A tethered tensile perching mechanism offers a simple, adaptable solution that can be retrofitted to existing robots and accommodates a variety of structure sizes and shapes. However, tethered tensile perching introduces significant modelling challenges which require precise management of aerial robot dynamics, including the cases of tether slack & tension, and momentum transfer. Achieving smooth wrapping and secure anchoring by targeting a specific tether segment adds further complexity. In this work, we present a novel trajectory framework for tethered tensile perching, utilizing reinforcement learning (RL) through the Soft Actor-Critic from Demonstrations (SACfD) algorithm. By incorporating both optimal and suboptimal demonstrations, our approach enhances training efficiency and responsiveness, achieving precise control over position and velocity. This framework enables the aerial robot to accurately target specific tether segments, facilitating reliable wrapping and secure anchoring. We validate our framework through extensive simulation and real-world experiments, and demonstrate effectiveness in achieving agile and reliable trajectory generation for tensile perching.
Low-Cost 3D printed, Biocompatible Ionic Polymer Membranes for Soft Actuators
Jan 21, 2025



Ionic polymer actuators, in essence, consist of ion exchange polymers sandwiched between layers of electrodes. They have recently gained recognition as promising candidates for soft actuators due to their lightweight nature, noise-free operation, and low-driving voltages. However, the materials traditionally utilized to develop them are often not human/environmentally friendly. Thus, to address this issue, researchers have been focusing on developing biocompatible versions of this actuator. Despite this, such actuators still face challenges in achieving high performance, in payload capacity, bending capabilities, and response time. In this paper, we present a biocompatible ionic polymer actuator whose membrane is fully 3D printed utilizing a direct ink writing method. The structure of the printed membranes consists of biodegradable ionic fluid encapsulated within layers of activated carbon polymers. From the microscopic observations of its structure, we confirmed that the ionic polymer is well encapsulated. The actuators can achieve a bending performance of up to 124$^\circ$ (curvature of 0.82 $\text{cm}^{-1}$), which, to our knowledge, is the highest curvature attained by any bending ionic polymer actuator to date. It can operate comfortably up to a 2 Hz driving frequency and can achieve blocked forces of up to 0.76 mN. Our results showcase a promising, high-performing biocompatible ionic polymer actuator, whose membrane can be easily manufactured in a single step using a standard FDM 3D printer. This approach paves the way for creating customized designs for functional soft robotic applications, including human-interactive devices, in the near future.
Features characterizing safe aerial-aquatic robots
Oct 31, 2024


This paper underscores the importance of environmental monitoring, and specifically of freshwater ecosystems, which play a critical role in sustaining life and global economy. Despite their importance, insufficient data availability prevents a comprehensive understanding of these ecosystems, thereby impeding informed decision-making concerning their preservation. Aerial-aquatic robots are identified as effective tools for freshwater sensing, offering rapid deployment and avoiding the need of using ships and manned teams. To advance the field of aerial aquatic robots, this paper conducts a comprehensive review of air-water transitions focusing on the water entry strategy of existing prototypes. This analysis also highlights the safety risks associated with each transition and proposes a set of design requirements relating to robots' tasks, mission objectives, and safety measures. To further explore the proposed design requirements, we present a novel robot with VTOL capability, enabling seamless air water transitions.
* Peer-reviewed and accepted in IEEE Ubiquitous Robots 2024, New York City
Exploring the Potential of Multi-modal Sensing Framework for Forest Ecology
Oct 30, 2024
Forests offer essential resources and services to humanity, yet preserving and restoring them presents challenges, particularly due to the limited availability of actionable data, especially in hard-to-reach areas like forest canopies. Accessibility continues to pose a challenge for biologists collecting data in forest environments, often requiring them to invest significant time and energy in climbing trees to place sensors. This operation not only consumes resources but also exposes them to danger. Efforts in robotics have been directed towards accessing the tree canopy using robots. A swarm of drones has showcased autonomous navigation through the canopy, maneuvering with agility and evading tree collisions, all aimed at mapping the area and collecting data. However, relying solely on free-flying drones has proven insufficient for data collection. Flying drones within the canopy generates loud noise, disturbing animals and potentially corrupting the data. Additionally, commercial drones often have limited autonomy for dexterous tasks where aerial physical interaction could be required, further complicating data acquisition efforts. Aerial deployed sensor placement methods such as bio-gliders and sensor shooting have proven effective for data collection within the lower canopy. However, these methods face challenges related to retrieving the data and sensors, often necessitating human intervention.
* Peer-reviewed and accepted in IEEE ICRA 2024 Workshop RUNE
Camber-changing flapping hydrofoils for efficient and environmental-safe water propulsion system
Oct 30, 2024



This research introduces a novel hydrofoil-based propulsion framework for unmanned aquatic robots, inspired by the undulating locomotion observed in select aquatic species. The proposed system incorporates a camber-modulating mechanism to enhance hydrofoil propulsive force generation and eventually efficiency. Through dynamic simulations, we validate the effectiveness of the camber-adjusting hydrofoil compared to a symmetric counterpart. The results demonstrate a significant improvement in horizontal thrust, emphasizing the potential of the cambering approach to enhance propulsive performance. Additionally, a prototype flipper design is presented, featuring individual control of heave and pitch motions, as well as a camber-adjustment mechanism. The integrated system not only provides efficient water-based propulsion but also offers the capacity for generating vertical forces during take-off maneuvers for seaplanes. The design is tailored to harness wave energy, contributing to the exploration of alternative energy resources. This work advances the understanding of bionic oscillatory principles for aquatic robots and provides a foundation for future developments in environmentally safe and agile underwater exploration.
* Peer-reviewed and accepted in Ubiquitous Robots 2024, New York City
Hybrid Soft Electrostatic Metamaterial Gripper for Multi-surface, Multi-object Adaptation
Mar 10, 2024



One of the trendsetting themes in soft robotics has been the goal of developing the ultimate universal soft robotic gripper. One that is capable of manipulating items of various shapes, sizes, thicknesses, textures, and weights. All the while still being lightweight and scalable in order to adapt to use cases. In this work, we report a soft gripper that enables delicate and precise grasps of fragile, deformable, and flexible objects but also excels in lifting heavy objects of up to 1617x its own body weight. The principle behind the soft gripper is based on extending the capabilities of electroadhesion soft grippers through the enhancement principles found in metamaterial adhesion cut and patterning. This design amplifies the adhesion and grasping payload in one direction while reducing the adhesion capabilities in the other direction. This counteracts the residual forces during peeling (a common problem with electroadhesive grippers), thus increasing its speed of release. In essence, we are able to tune the maximum strength and peeling speed, beyond the capabilities of previous electroadhesive grippers. We study the capabilities of the system through a wide range of experiments with single and multiple-fingered peel tests. We also demonstrate its modular and adaptive capabilities in the real-world with a two-finger gripper, by performing grasping tests of up to $5$ different multi-surfaced objects.
Aerial Tensile Perching and Disentangling Mechanism for Long-Term Environmental Monitoring
Mar 05, 2024Aerial robots show significant potential for forest canopy research and environmental monitoring by providing data collection capabilities at high spatial and temporal resolutions. However, limited flight endurance hinders their application. Inspired by natural perching behaviours, we propose a multi-modal aerial robot system that integrates tensile perching for energy conservation and a suspended actuated pod for data collection. The system consists of a quadrotor drone, a slewing ring mechanism allowing 360{\deg} tether rotation, and a streamlined pod with two ducted propellers connected via a tether. Winding and unwinding the tether allows the pod to move within the canopy, and activating the propellers allows the tether to be wrapped around branches for perching or disentangling. We experimentally determined the minimum counterweights required for stable perching under various conditions. Building on this, we devised and evaluated multiple perching and disentangling strategies. Comparisons of perching and disentangling manoeuvres demonstrate energy savings that could be further maximized with the use of the pod or tether winding. These approaches can reduce energy consumption to only 22\% and 1.5\%, respectively, compared to a drone disentangling manoeuvre. We also calculated the minimum idle time required by the proposed system after the system perching and motor shut down to save energy on a mission, which is 48.9\% of the operating time. Overall, the integrated system expands the operational capabilities and enhances the energy efficiency of aerial robots for long-term monitoring tasks.
Gotta catch 'em all, safely! Aerial-deployed soft underwater gripper
Mar 04, 2024
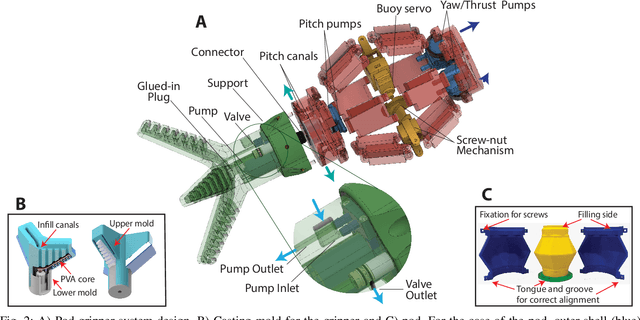


Underwater soft grippers exhibit potential for applications such as monitoring, research, and object retrieval. However, existing underwater gripping techniques frequently cause disturbances to ecosystems. In response to this challenge, we present a novel underwater gripping framework comprising a lightweight gripper affixed to a custom submarine pod deployable via drone. This approach minimizes water disturbance and enables efficient navigation to target areas, enhancing overall mission effectiveness. The pod allows for underwater motion and is characterized by four degrees of freedom. It is provided with a custom buoyancy system, two water pumps for differential thrust and two for pitching. The system allows for buoyancy adjustments up to a depth of 6 meters, as well as motion in the plane. The 3-fingered gripper is manufactured out of silicone and was successfully tested on objects with different shapes and sizes, demonstrating a maximum pulling force of up to 8 N when underwater. The reliability of the submarine pod was tested in a water tank by tracking its attitude and energy consumption during grasping maneuvers. The system also accomplished a successful mission in a lake, where it was deployed on a hexacopter. Overall, the integration of this system expands the operational capabilities of underwater grasping, makes grasping missions more efficient and easy to automate, as well as causing less disturbance to the water ecosystem.
Robotic Electrospinning Actuated by Non-Circular Joint Continuum Manipulator for Endoluminal Therapy
Jun 07, 2021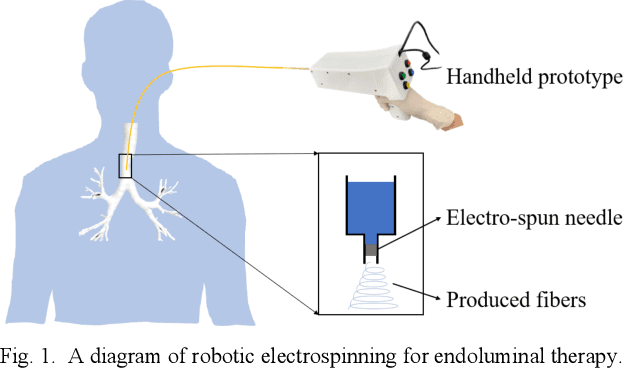
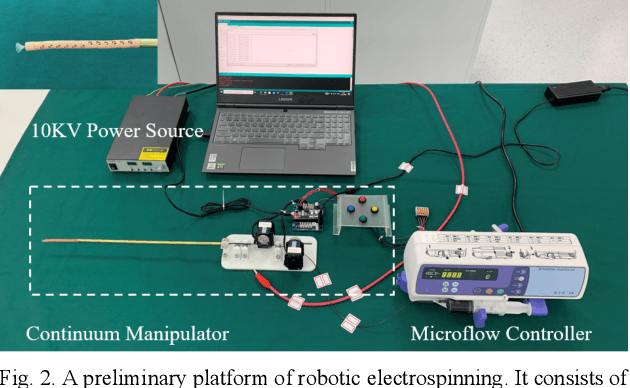
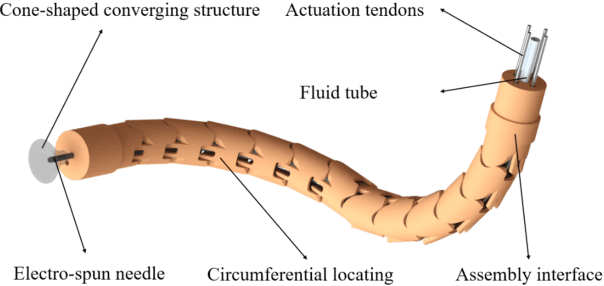
Electrospinning has exhibited excellent benefits to treat the trauma for tissue engineering due to its produced micro/nano fibrous structure. It can effectively adhere to the tissue surface for long-term continuous therapy. This paper develops a robotic electrospinning platform for endoluminal therapy. The platform consists of a continuum manipulator, the electrospinning device, and the actuation unit. The continuum manipulator has two bending sections to facilitate the steering of the tip needle for a controllable spinning direction. Non-circular joint profile is carefully designed to enable a constant length of the centreline of a continuum manipulator for stable fluid transmission inside it. Experiments are performed on a bronchus phantom, and the steering ability and bending limitation in each direction are also investigated. The endoluminal electrospinning is also fulfilled by a trajectory following and points targeting experiments. The effective adhesive area of the produced fibre is also illustrated. The proposed robotic electrospinning shows its feasibility to precisely spread more therapeutic drug to construct fibrous structure for potential endoluminal treatment.