 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREPA-E: Unlocking VAE for End-to-End Tuning with Latent Diffusion Transformers
Apr 14, 2025In this paper we tackle a fundamental question: "Can we train latent diffusion models together with the variational auto-encoder (VAE) tokenizer in an end-to-end manner?" Traditional deep-learning wisdom dictates that end-to-end training is often preferable when possible. However, for latent diffusion transformers, it is observed that end-to-end training both VAE and diffusion-model using standard diffusion-loss is ineffective, even causing a degradation in final performance. We show that while diffusion loss is ineffective, end-to-end training can be unlocked through the representation-alignment (REPA) loss -- allowing both VAE and diffusion model to be jointly tuned during the training process. Despite its simplicity, the proposed training recipe (REPA-E) shows remarkable performance; speeding up diffusion model training by over 17x and 45x over REPA and vanilla training recipes, respectively. Interestingly, we observe that end-to-end tuning with REPA-E also improves the VAE itself; leading to improved latent space structure and downstream generation performance. In terms of final performance, our approach sets a new state-of-the-art; achieving FID of 1.26 and 1.83 with and without classifier-free guidance on ImageNet 256 x 256. Code is available at https://end2end-diffusion.github.io.
Transfer between Modalities with MetaQueries
Apr 08, 2025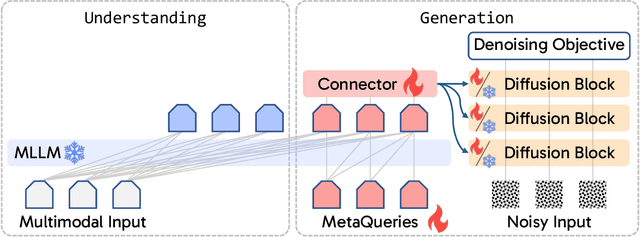


Unified multimodal models aim to integrate understanding (text output) and generation (pixel output), but aligning these different modalities within a single architecture often demands complex training recipes and careful data balancing. We introduce MetaQueries, a set of learnable queries that act as an efficient interface between autoregressive multimodal LLMs (MLLMs) and diffusion models. MetaQueries connects the MLLM's latents to the diffusion decoder, enabling knowledge-augmented image generation by leveraging the MLLM's deep understanding and reasoning capabilities. Our method simplifies training, requiring only paired image-caption data and standard diffusion objectives. Notably, this transfer is effective even when the MLLM backbone remains frozen, thereby preserving its state-of-the-art multimodal understanding capabilities while achieving strong generative performance. Additionally, our method is flexible and can be easily instruction-tuned for advanced applications such as image editing and subject-driven generation.
Scaling Language-Free Visual Representation Learning
Apr 01, 2025



Visual Self-Supervised Learning (SSL) currently underperforms Contrastive Language-Image Pretraining (CLIP) in multimodal settings such as Visual Question Answering (VQA). This multimodal gap is often attributed to the semantics introduced by language supervision, even though visual SSL and CLIP models are often trained on different data. In this work, we ask the question: "Do visual self-supervised approaches lag behind CLIP due to the lack of language supervision, or differences in the training data?" We study this question by training both visual SSL and CLIP models on the same MetaCLIP data, and leveraging VQA as a diverse testbed for vision encoders. In this controlled setup, visual SSL models scale better than CLIP models in terms of data and model capacity, and visual SSL performance does not saturate even after scaling up to 7B parameters. Consequently, we observe visual SSL methods achieve CLIP-level performance on a wide range of VQA and classic vision benchmarks. These findings demonstrate that pure visual SSL can match language-supervised visual pretraining at scale, opening new opportunities for vision-centric representation learning.
PISA Experiments: Exploring Physics Post-Training for Video Diffusion Models by Watching Stuff Drop
Mar 12, 2025



Large-scale pre-trained video generation models excel in content creation but are not reliable as physically accurate world simulators out of the box. This work studies the process of post-training these models for accurate world modeling through the lens of the simple, yet fundamental, physics task of modeling object freefall. We show state-of-the-art video generation models struggle with this basic task, despite their visually impressive outputs. To remedy this problem, we find that fine-tuning on a relatively small amount of simulated videos is effective in inducing the dropping behavior in the model, and we can further improve results through a novel reward modeling procedure we introduce. Our study also reveals key limitations of post-training in generalization and distribution modeling. Additionally, we release a benchmark for this task that may serve as a useful diagnostic tool for tracking physical accuracy in large-scale video generative model development.
SFT Memorizes, RL Generalizes: A Comparative Study of Foundation Model Post-training
Jan 28, 2025



Supervised fine-tuning (SFT) and reinforcement learning (RL) are widely used post-training techniques for foundation models. However, their roles in enhancing model generalization capabilities remain unclear. This paper studies the difference between SFT and RL on generalization and memorization, focusing on text-based rule variants and visual variants. We introduce GeneralPoints, an arithmetic reasoning card game, and adopt V-IRL, a real-world navigation environment, to assess how models trained with SFT and RL generalize to unseen variants in both textual and visual domains. We show that RL, especially when trained with an outcome-based reward, generalizes across both rule-based textual and visual variants. SFT, in contrast, tends to memorize training data and struggles to generalize out-of-distribution scenarios. Further analysis reveals that RL improves the model's underlying visual recognition capabilities, contributing to its enhanced generalization in the visual domain. Despite RL's superior generalization, we show that SFT remains essential for effective RL training; SFT stabilizes the model's output format, enabling subsequent RL to achieve its performance gains. These findings demonstrates the capability of RL for acquiring generalizable knowledge in complex, multi-modal tasks.
Inference-Time Scaling for Diffusion Models beyond Scaling Denoising Steps
Jan 16, 2025



Generative models have made significant impacts across various domains, largely due to their ability to scale during training by increasing data, computational resources, and model size, a phenomenon characterized by the scaling laws. Recent research has begun to explore inference-time scaling behavior in Large Language Models (LLMs), revealing how performance can further improve with additional computation during inference. Unlike LLMs, diffusion models inherently possess the flexibility to adjust inference-time computation via the number of denoising steps, although the performance gains typically flatten after a few dozen. In this work, we explore the inference-time scaling behavior of diffusion models beyond increasing denoising steps and investigate how the generation performance can further improve with increased computation. Specifically, we consider a search problem aimed at identifying better noises for the diffusion sampling process. We structure the design space along two axes: the verifiers used to provide feedback, and the algorithms used to find better noise candidates. Through extensive experiments on class-conditioned and text-conditioned image generation benchmarks, our findings reveal that increasing inference-time compute leads to substantial improvements in the quality of samples generated by diffusion models, and with the complicated nature of images, combinations of the components in the framework can be specifically chosen to conform with different application scenario.
Thinking in Space: How Multimodal Large Language Models See, Remember, and Recall Spaces
Dec 18, 2024



Humans possess the visual-spatial intelligence to remember spaces from sequential visual observations. However, can Multimodal Large Language Models (MLLMs) trained on million-scale video datasets also ``think in space'' from videos? We present a novel video-based visual-spatial intelligence benchmark (VSI-Bench) of over 5,000 question-answer pairs, and find that MLLMs exhibit competitive - though subhuman - visual-spatial intelligence. We probe models to express how they think in space both linguistically and visually and find that while spatial reasoning capabilities remain the primary bottleneck for MLLMs to reach higher benchmark performance, local world models and spatial awareness do emerge within these models. Notably, prevailing linguistic reasoning techniques (e.g., chain-of-thought, self-consistency, tree-of-thoughts) fail to improve performance, whereas explicitly generating cognitive maps during question-answering enhances MLLMs' spatial distance ability.
MetaMorph: Multimodal Understanding and Generation via Instruction Tuning
Dec 18, 2024



In this work, we propose Visual-Predictive Instruction Tuning (VPiT) - a simple and effective extension to visual instruction tuning that enables a pretrained LLM to quickly morph into an unified autoregressive model capable of generating both text and visual tokens. VPiT teaches an LLM to predict discrete text tokens and continuous visual tokens from any input sequence of image and text data curated in an instruction-following format. Our empirical investigation reveals several intriguing properties of VPiT: (1) visual generation ability emerges as a natural byproduct of improved visual understanding, and can be unlocked efficiently with a small amount of generation data; (2) while we find understanding and generation to be mutually beneficial, understanding data contributes to both capabilities more effectively than generation data. Building upon these findings, we train our MetaMorph model and achieve competitive performance on both visual understanding and generation. In visual generation, MetaMorph can leverage the world knowledge and reasoning abilities gained from LLM pretraining, and overcome common failure modes exhibited by other generation models. Our results suggest that LLMs may have strong "prior" vision capabilities that can be efficiently adapted to both visual understanding and generation with a relatively simple instruction tuning process.
Altogether: Image Captioning via Re-aligning Alt-text
Oct 22, 2024



This paper focuses on creating synthetic data to improve the quality of image captions. Existing works typically have two shortcomings. First, they caption images from scratch, ignoring existing alt-text metadata, and second, lack transparency if the captioners' training data (e.g. GPT) is unknown. In this paper, we study a principled approach Altogether based on the key idea to edit and re-align existing alt-texts associated with the images. To generate training data, we perform human annotation where annotators start with the existing alt-text and re-align it to the image content in multiple rounds, consequently constructing captions with rich visual concepts. This differs from prior work that carries out human annotation as a one-time description task solely based on images and annotator knowledge. We train a captioner on this data that generalizes the process of re-aligning alt-texts at scale. Our results show our Altogether approach leads to richer image captions that also improve text-to-image generation and zero-shot image classification tasks.
Representation Alignment for Generation: Training Diffusion Transformers Is Easier Than You Think
Oct 09, 2024



Recent studies have shown that the denoising process in (generative) diffusion models can induce meaningful (discriminative) representations inside the model, though the quality of these representations still lags behind those learned through recent self-supervised learning methods. We argue that one main bottleneck in training large-scale diffusion models for generation lies in effectively learning these representations. Moreover, training can be made easier by incorporating high-quality external visual representations, rather than relying solely on the diffusion models to learn them independently. We study this by introducing a straightforward regularization called REPresentation Alignment (REPA), which aligns the projections of noisy input hidden states in denoising networks with clean image representations obtained from external, pretrained visual encoders. The results are striking: our simple strategy yields significant improvements in both training efficiency and generation quality when applied to popular diffusion and flow-based transformers, such as DiTs and SiTs. For instance, our method can speed up SiT training by over 17.5$\times$, matching the performance (without classifier-free guidance) of a SiT-XL model trained for 7M steps in less than 400K steps. In terms of final generation quality, our approach achieves state-of-the-art results of FID=1.42 using classifier-free guidance with the guidance interval.