 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Generative Modeling with Manually Bridged Diffusion Models
Feb 27, 2025In this paper we describe a novel framework for diffusion-based generative modeling on constrained spaces. In particular, we introduce manual bridges, a framework that expands the kinds of constraints that can be practically used to form so-called diffusion bridges. We develop a mechanism for combining multiple such constraints so that the resulting multiply-constrained model remains a manual bridge that respects all constraints. We also develop a mechanism for training a diffusion model that respects such multiple constraints while also adapting it to match a data distribution. We develop and extend theory demonstrating the mathematical validity of our mechanisms. Additionally, we demonstrate our mechanism in constrained generative modeling tasks, highlighting a particular high-value application in modeling trajectory initializations for path planning and control in autonomous vehicles.
TorchDriveEnv: A Reinforcement Learning Benchmark for Autonomous Driving with Reactive, Realistic, and Diverse Non-Playable Characters
May 07, 2024



The training, testing, and deployment, of autonomous vehicles requires realistic and efficient simulators. Moreover, because of the high variability between different problems presented in different autonomous systems, these simulators need to be easy to use, and easy to modify. To address these problems we introduce TorchDriveSim and its benchmark extension TorchDriveEnv. TorchDriveEnv is a lightweight reinforcement learning benchmark programmed entirely in Python, which can be modified to test a number of different factors in learned vehicle behavior, including the effect of varying kinematic models, agent types, and traffic control patterns. Most importantly unlike many replay based simulation approaches, TorchDriveEnv is fully integrated with a state of the art behavioral simulation API. This allows users to train and evaluate driving models alongside data driven Non-Playable Characters (NPC) whose initializations and driving behavior are reactive, realistic, and diverse. We illustrate the efficiency and simplicity of TorchDriveEnv by evaluating common reinforcement learning baselines in both training and validation environments. Our experiments show that TorchDriveEnv is easy to use, but difficult to solve.
Semantically Consistent Video Inpainting with Conditional Diffusion Models
Apr 30, 2024Current state-of-the-art methods for video inpainting typically rely on optical flow or attention-based approaches to inpaint masked regions by propagating visual information across frames. While such approaches have led to significant progress on standard benchmarks, they struggle with tasks that require the synthesis of novel content that is not present in other frames. In this paper we reframe video inpainting as a conditional generative modeling problem and present a framework for solving such problems with conditional video diffusion models. We highlight the advantages of using a generative approach for this task, showing that our method is capable of generating diverse, high-quality inpaintings and synthesizing new content that is spatially, temporally, and semantically consistent with the provided context.
Nearest Neighbour Score Estimators for Diffusion Generative Models
Feb 12, 2024



Score function estimation is the cornerstone of both training and sampling from diffusion generative models. Despite this fact, the most commonly used estimators are either biased neural network approximations or high variance Monte Carlo estimators based on the conditional score. We introduce a novel nearest neighbour score function estimator which utilizes multiple samples from the training set to dramatically decrease estimator variance. We leverage our low variance estimator in two compelling applications. Training consistency models with our estimator, we report a significant increase in both convergence speed and sample quality. In diffusion models, we show that our estimator can replace a learned network for probability-flow ODE integration, opening promising new avenues of future research.
Don't be so negative! Score-based Generative Modeling with Oracle-assisted Guidance
Jul 31, 2023The maximum likelihood principle advocates parameter estimation via optimization of the data likelihood function. Models estimated in this way can exhibit a variety of generalization characteristics dictated by, e.g. architecture, parameterization, and optimization bias. This work addresses model learning in a setting where there further exists side-information in the form of an oracle that can label samples as being outside the support of the true data generating distribution. Specifically we develop a new denoising diffusion probabilistic modeling (DDPM) methodology, Gen-neG, that leverages this additional side-information. Our approach builds on generative adversarial networks (GANs) and discriminator guidance in diffusion models to guide the generation process towards the positive support region indicated by the oracle. We empirically establish the utility of Gen-neG in applications including collision avoidance in self-driving simulators and safety-guarded human motion generation.
RangeAugment: Efficient Online Augmentation with Range Learning
Dec 20, 2022



State-of-the-art automatic augmentation methods (e.g., AutoAugment and RandAugment) for visual recognition tasks diversify training data using a large set of augmentation operations. The range of magnitudes of many augmentation operations (e.g., brightness and contrast) is continuous. Therefore, to make search computationally tractable, these methods use fixed and manually-defined magnitude ranges for each operation, which may lead to sub-optimal policies. To answer the open question on the importance of magnitude ranges for each augmentation operation, we introduce RangeAugment that allows us to efficiently learn the range of magnitudes for individual as well as composite augmentation operations. RangeAugment uses an auxiliary loss based on image similarity as a measure to control the range of magnitudes of augmentation operations. As a result, RangeAugment has a single scalar parameter for search, image similarity, which we simply optimize via linear search. RangeAugment integrates seamlessly with any model and learns model- and task-specific augmentation policies. With extensive experiments on the ImageNet dataset across different networks, we show that RangeAugment achieves competitive performance to state-of-the-art automatic augmentation methods with 4-5 times fewer augmentation operations. Experimental results on semantic segmentation, object detection, foundation models, and knowledge distillation further shows RangeAugment's effectiveness.
Flexible Diffusion Modeling of Long Videos
May 23, 2022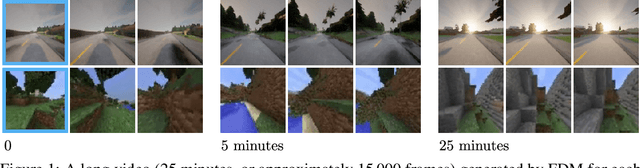
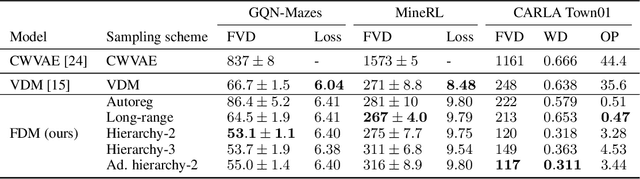
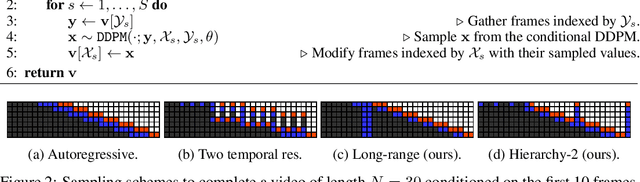
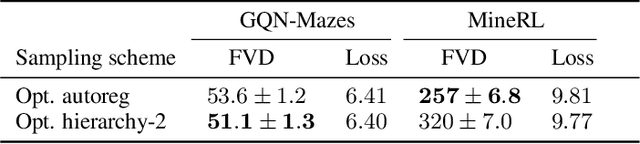
We present a framework for video modeling based on denoising diffusion probabilistic models that produces long-duration video completions in a variety of realistic environments. We introduce a generative model that can at test-time sample any arbitrary subset of video frames conditioned on any other subset and present an architecture adapted for this purpose. Doing so allows us to efficiently compare and optimize a variety of schedules for the order in which frames in a long video are sampled and use selective sparse and long-range conditioning on previously sampled frames. We demonstrate improved video modeling over prior work on a number of datasets and sample temporally coherent videos over 25 minutes in length. We additionally release a new video modeling dataset and semantically meaningful metrics based on videos generated in the CARLA self-driving car simulator.
Image Completion via Inference in Deep Generative Models
Feb 24, 2021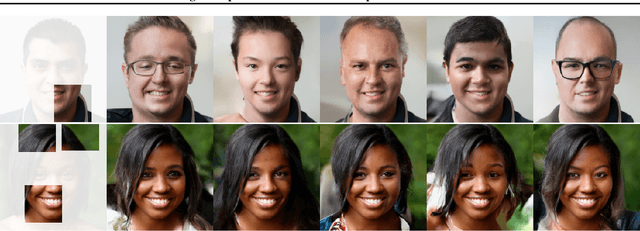
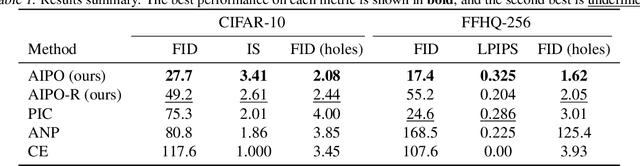
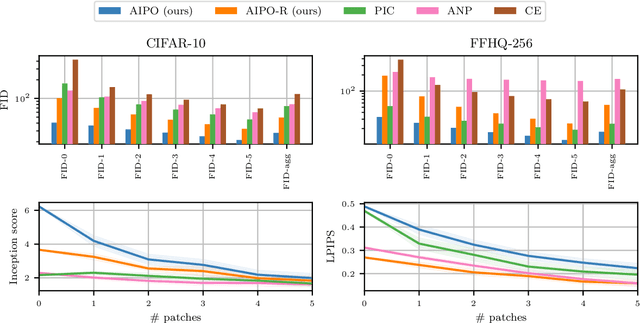
We consider image completion from the perspective of amortized inference in an image generative model. We leverage recent state of the art variational auto-encoder architectures that have been shown to produce photo-realistic natural images at non-trivial resolutions. Through amortized inference in such a model we can train neural artifacts that produce diverse, realistic image completions even when the vast majority of an image is missing. We demonstrate superior sample quality and diversity compared to prior art on the CIFAR-10 and FFHQ-256 datasets. We conclude by describing and demonstrating an application that requires an in-painting model with the capabilities ours exhibits: the use of Bayesian optimal experimental design to select the most informative sequence of small field of view x-rays for chest pathology detection.
Uncertainty in Neural Processes
Oct 08, 2020



We explore the effects of architecture and training objective choice on amortized posterior predictive inference in probabilistic conditional generative models. We aim this work to be a counterpoint to a recent trend in the literature that stresses achieving good samples when the amount of conditioning data is large. We instead focus our attention on the case where the amount of conditioning data is small. We highlight specific architecture and objective choices that we find lead to qualitative and quantitative improvement to posterior inference in this low data regime. Specifically we explore the effects of choices of pooling operator and variational family on posterior quality in neural processes. Superior posterior predictive samples drawn from our novel neural process architectures are demonstrated via image completion/in-painting experiments.
Planning as Inference in Epidemiological Models
Apr 03, 2020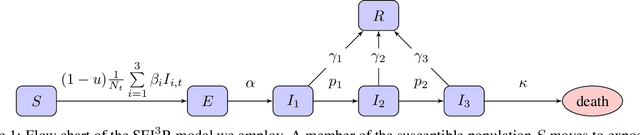
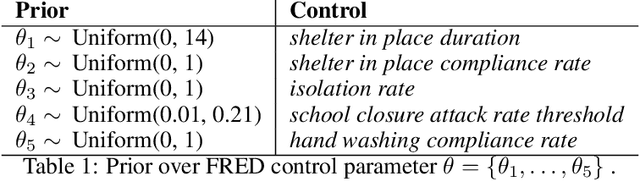
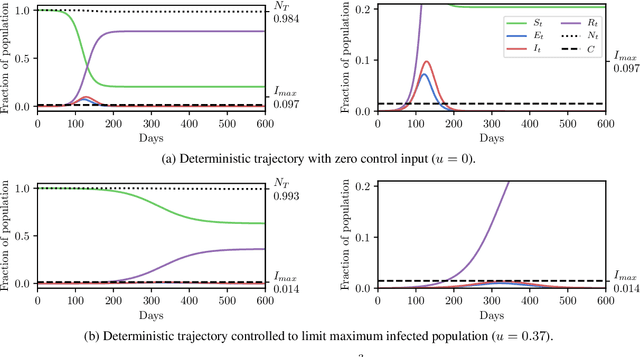
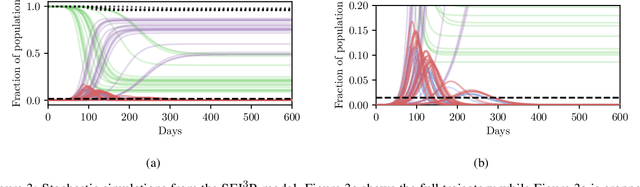
In this work we demonstrate how existing software tools can be used to automate parts of infectious disease-control policy-making via performing inference in existing epidemiological dynamics models. The kind of inference tasks undertaken include computing, for planning purposes, the posterior distribution over putatively controllable, via direct policy-making choices, simulation model parameters that give rise to acceptable disease progression outcomes. Neither the full capabilities of such inference automation software tools nor their utility for planning is widely disseminated at the current time. Timely gains in understanding about these tools and how they can be used may lead to more fine-grained and less economically damaging policy prescriptions, particularly during the current COVID-19 pandemic.