 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Guided Safety Agent for Edge Robotics with an ISO-Compliant Perception-Compute-Control Architecture
Apr 22, 2026Ensuring functional safety in human-robot interaction is challenging because AI perception is inherently probabilistic, whereas industrial standards require deterministic behavior. We present an LLM-guided safety agent for edge robotics, built on an ISO-compliant low-latency perception-compute-control architecture. Our method translates natural-language safety regulations into executable predicates and deploys them through a redundant heterogeneous edge runtime. For fault-tolerant closed-loop execution under edge constraints, we adopt a symmetric dual-modular redundancy design with parallel independent execution for low-latency perception, computation, and control. We prototype the system on a dual-RK3588 platform and evaluate it in representative human-robot interaction scenarios. The results demonstrate a practical edge implementation path toward ISO 13849 Category 3 and PL d using cost-effective hardware, supporting practical deployment of safety-critical embodied AI.
Crafting Training Degradation Distribution for the Accuracy-Generalization Trade-off in Real-World Super-Resolution
Jun 01, 2023



Super-resolution (SR) techniques designed for real-world applications commonly encounter two primary challenges: generalization performance and restoration accuracy. We demonstrate that when methods are trained using complex, large-range degradations to enhance generalization, a decline in accuracy is inevitable. However, since the degradation in a certain real-world applications typically exhibits a limited variation range, it becomes feasible to strike a trade-off between generalization performance and testing accuracy within this scope. In this work, we introduce a novel approach to craft training degradation distributions using a small set of reference images. Our strategy is founded upon the binned representation of the degradation space and the Fr\'echet distance between degradation distributions. Our results indicate that the proposed technique significantly improves the performance of test images while preserving generalization capabilities in real-world applications.
Super-Resolution by Predicting Offsets: An Ultra-Efficient Super-Resolution Network for Rasterized Images
Oct 09, 2022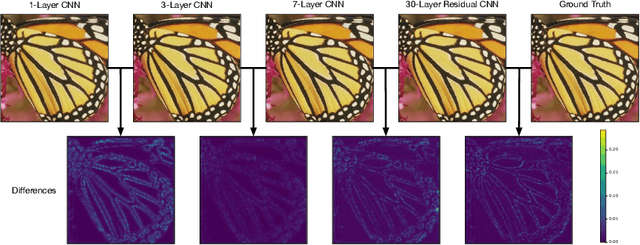
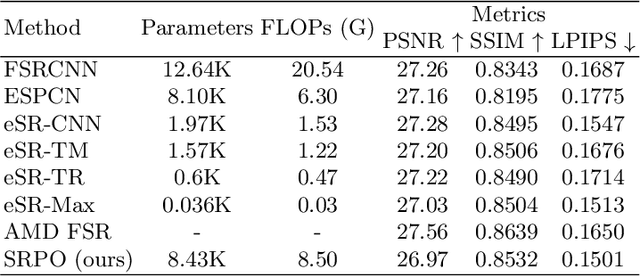
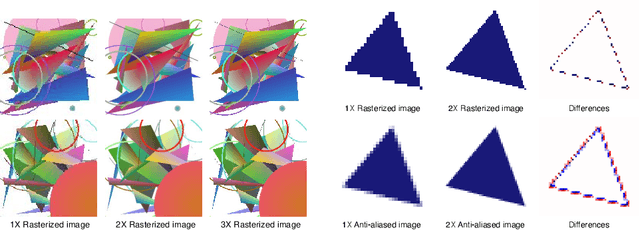
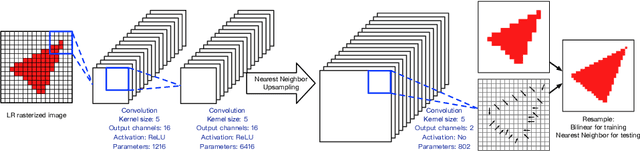
Rendering high-resolution (HR) graphics brings substantial computational costs. Efficient graphics super-resolution (SR) methods may achieve HR rendering with small computing resources and have attracted extensive research interests in industry and research communities. We present a new method for real-time SR for computer graphics, namely Super-Resolution by Predicting Offsets (SRPO). Our algorithm divides the image into two parts for processing, i.e., sharp edges and flatter areas. For edges, different from the previous SR methods that take the anti-aliased images as inputs, our proposed SRPO takes advantage of the characteristics of rasterized images to conduct SR on the rasterized images. To complement the residual between HR and low-resolution (LR) rasterized images, we train an ultra-efficient network to predict the offset maps to move the appropriate surrounding pixels to the new positions. For flat areas, we found simple interpolation methods can already generate reasonable output. We finally use a guided fusion operation to integrate the sharp edges generated by the network and flat areas by the interpolation method to get the final SR image. The proposed network only contains 8,434 parameters and can be accelerated by network quantization. Extensive experiments show that the proposed SRPO can achieve superior visual effects at a smaller computational cost than the existing state-of-the-art methods.