 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoupling Intent and Action for Pedestrian Crossing Behavior Prediction
May 10, 2021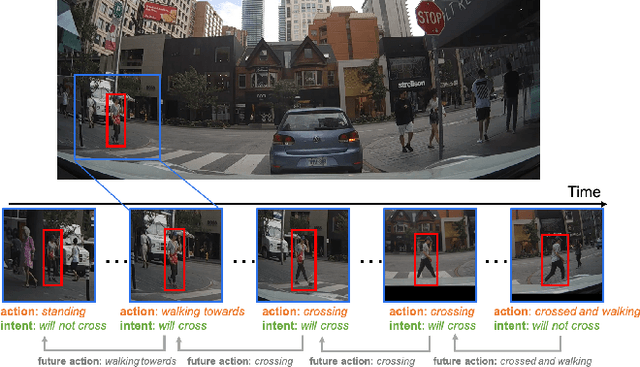
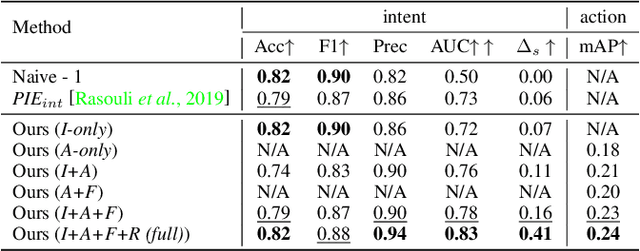
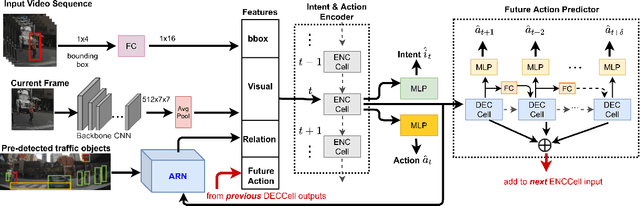
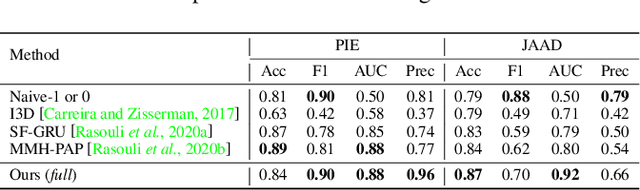
Accurate prediction of pedestrian crossing behaviors by autonomous vehicles can significantly improve traffic safety. Existing approaches often model pedestrian behaviors using trajectories or poses but do not offer a deeper semantic interpretation of a person's actions or how actions influence a pedestrian's intention to cross in the future. In this work, we follow the neuroscience and psychological literature to define pedestrian crossing behavior as a combination of an unobserved inner will (a probabilistic representation of binary intent of crossing vs. not crossing) and a set of multi-class actions (e.g., walking, standing, etc.). Intent generates actions, and the future actions in turn reflect the intent. We present a novel multi-task network that predicts future pedestrian actions and uses predicted future action as a prior to detect the present intent and action of the pedestrian. We also designed an attention relation network to incorporate external environmental contexts thus further improve intent and action detection performance. We evaluated our approach on two naturalistic driving datasets, PIE and JAAD, and extensive experiments show significantly improved and more explainable results for both intent detection and action prediction over state-of-the-art approaches. Our code is available at: https://github.com/umautobots/pedestrian_intent_action_detection.
Generating Continuous Motion and Force Plans in Real-Time for Legged Mobile Manipulation
Apr 23, 2021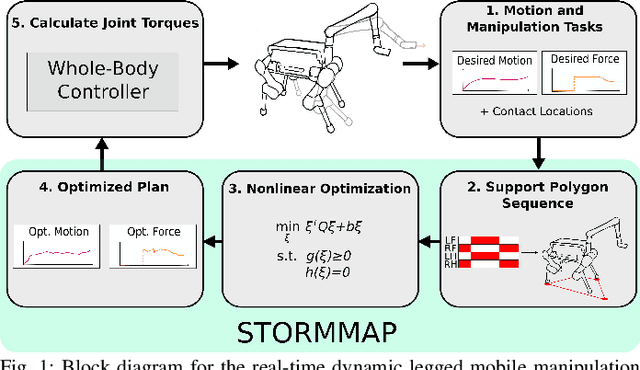
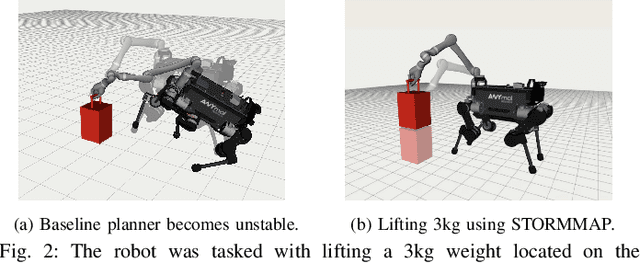
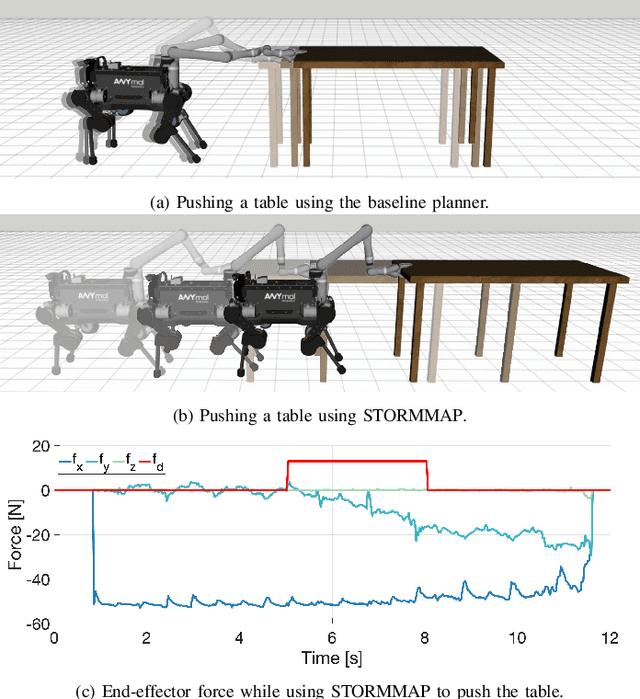
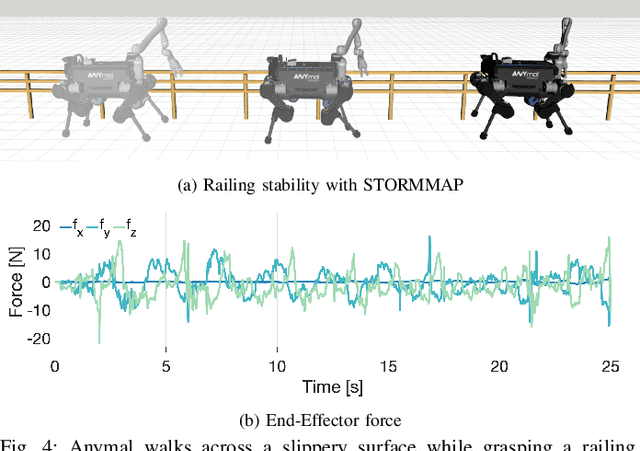
Manipulators can be added to legged robots, allowing them to interact with and change their environment. Legged mobile manipulation planners must consider how contact forces generated by these manipulators affect the system. Current planning strategies either treat these forces as immutable during planning or are unable to optimize over these contact forces while operating in real-time. This paper presents the Stability and Task Oriented Receding-Horizon Motion and Manipulation Autonomous Planner (STORMMAP) that is able to generate continuous plans for the robot's motion and manipulation force trajectories that ensure dynamic feasibility and stability of the platform, and incentivizes accomplishing manipulation and motion tasks specified by a user. STORMMAP uses a nonlinear optimization problem to compute these plans and is able to run in real-time by assuming contact locations are given a-priori, either by a user or an external algorithm. A variety of simulated experiments on a quadruped with a manipulator mounted to its torso demonstrate the versatility of STORMMAP. In contrast to existing state of the art methods, the approach described in this paper generates continuous plans in under ten milliseconds, an order of magnitude faster than previous strategies.
A Kinematic Model for Trajectory Prediction in General Highway Scenarios
Mar 30, 2021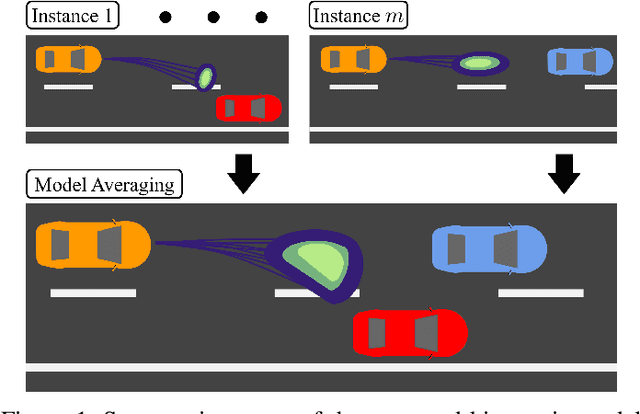
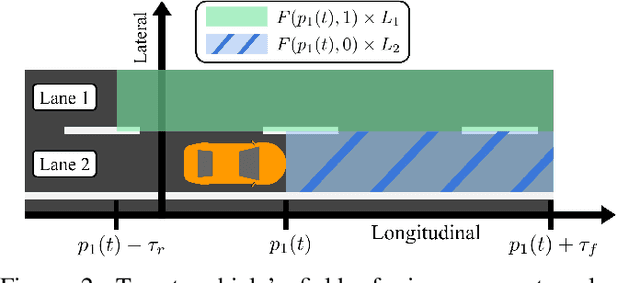
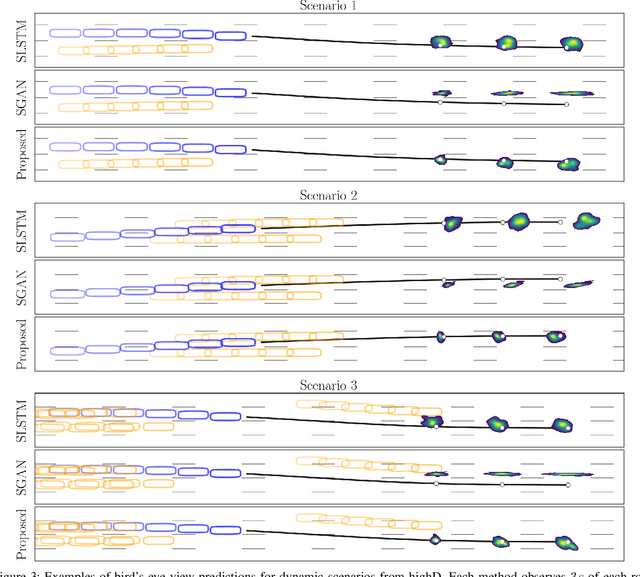
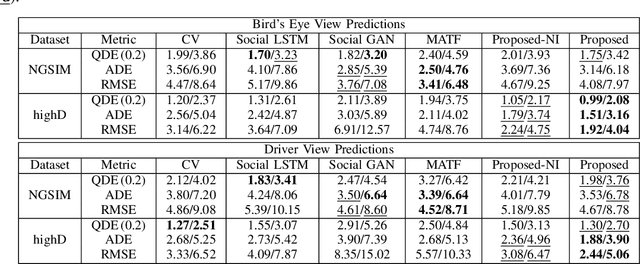
Highway driving invariably combines high speeds with the need to interact closely with other drivers. Prediction methods enable autonomous vehicles (AVs) to anticipate drivers' future trajectories and plan accordingly. Kinematic methods for prediction have traditionally ignored the presence of other drivers, or made predictions only for a limited set of scenarios. Data-driven approaches fill this gap by learning from large datasets to predict trajectories in general scenarios. While they achieve high accuracy, they also lose the interpretability and tools for model validation enjoyed by kinematic methods. This letter proposes a novel kinematic model to describe car-following and lane change behavior, and extends it to predict trajectories in general scenarios. Experiments on highway datasets under varied sensing conditions demonstrate that the proposed method outperforms state-of-the-art methods.
Learning Rotation-Invariant Representations of Point Clouds Using Aligned Edge Convolutional Neural Networks
Jan 02, 2021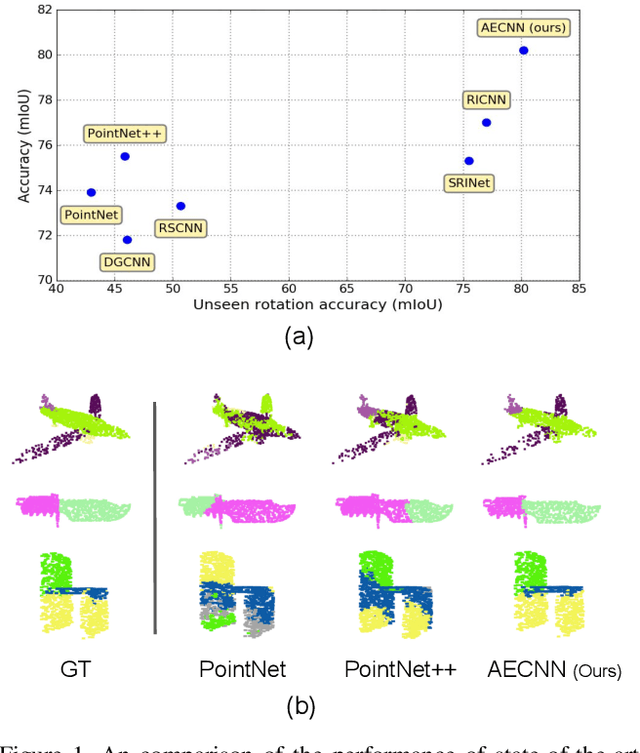
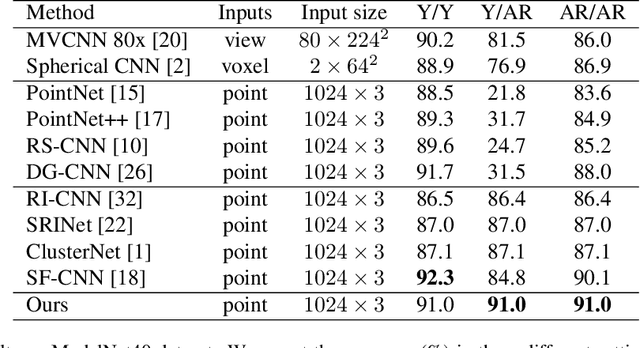
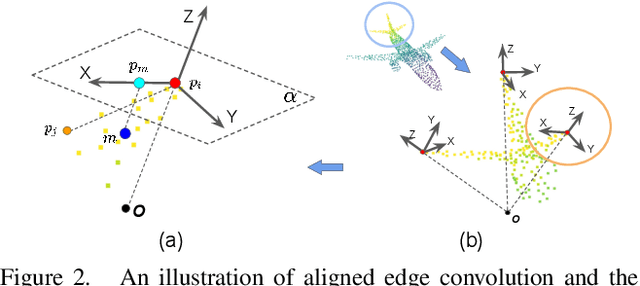
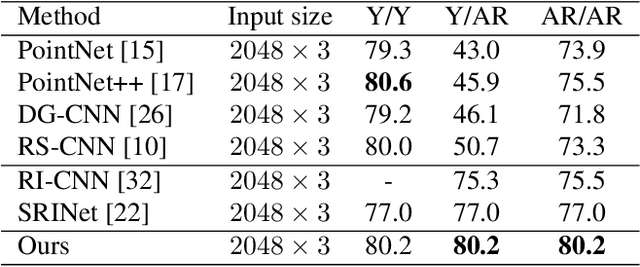
Point cloud analysis is an area of increasing interest due to the development of 3D sensors that are able to rapidly measure the depth of scenes accurately. Unfortunately, applying deep learning techniques to perform point cloud analysis is non-trivial due to the inability of these methods to generalize to unseen rotations. To address this limitation, one usually has to augment the training data, which can lead to extra computation and require larger model complexity. This paper proposes a new neural network called the Aligned Edge Convolutional Neural Network (AECNN) that learns a feature representation of point clouds relative to Local Reference Frames (LRFs) to ensure invariance to rotation. In particular, features are learned locally and aligned with respect to the LRF of an automatically computed reference point. The proposed approach is evaluated on point cloud classification and part segmentation tasks. This paper illustrates that the proposed technique outperforms a variety of state of the art approaches (even those trained on augmented datasets) in terms of robustness to rotation without requiring any additional data augmentation.
Reachability-based Trajectory Safeguard (RTS): A Safe and Fast Reinforcement Learning Safety Layer for Continuous Control
Nov 17, 2020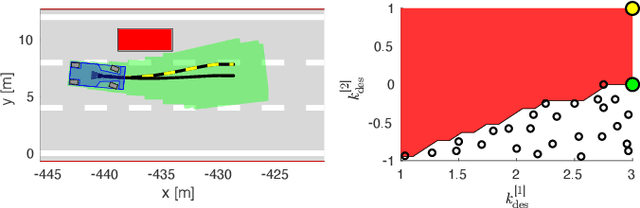
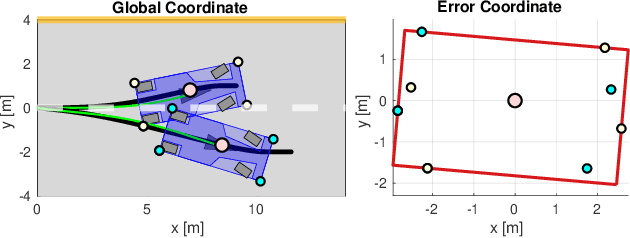
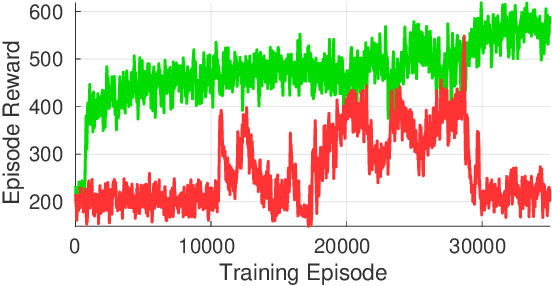
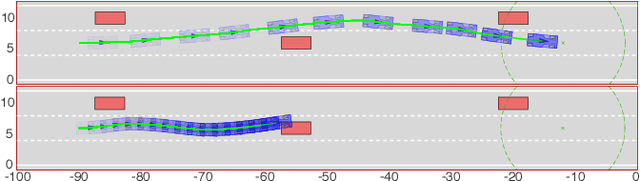
Reinforcement Learning (RL) algorithms have achieved remarkable performance in decision making and control tasks due to their ability to reason about long-term, cumulative reward using trial and error. However, during RL training, applying this trial-and-error approach to real-world robots operating in safety critical environment may lead to collisions. To address this challenge, this paper proposes a Reachability-based Trajectory Safeguard (RTS), which leverages trajectory parameterization and reachability analysis to ensure safety while a policy is being learned. This method ensures a robot with continuous action space can be trained from scratch safely in real-time. Importantly, this safety layer can still be applied after a policy has been learned. The efficacy of this method is illustrated on three nonlinear robot models, including a 12-D quadrotor drone, in simulation. By ensuring safety with RTS, this paper demonstrates that the proposed algorithm is not only safe, but can achieve a higher reward in a considerably shorter training time when compared to a non-safe counterpart.
Advantages of Bilinear Koopman Realizations for the Modeling and Control of Systems with Unknown Dynamics
Oct 26, 2020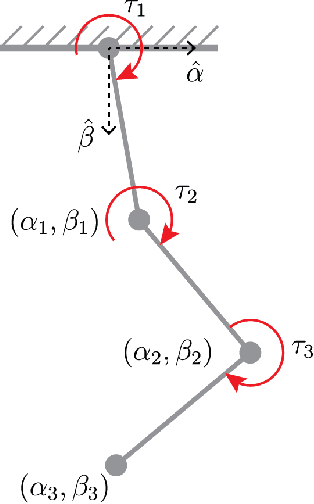
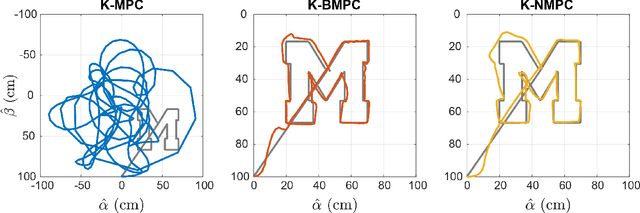
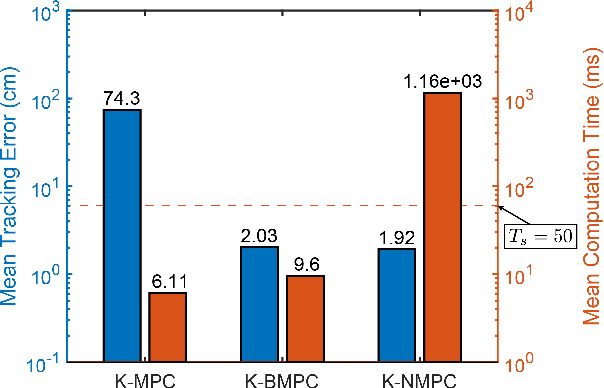
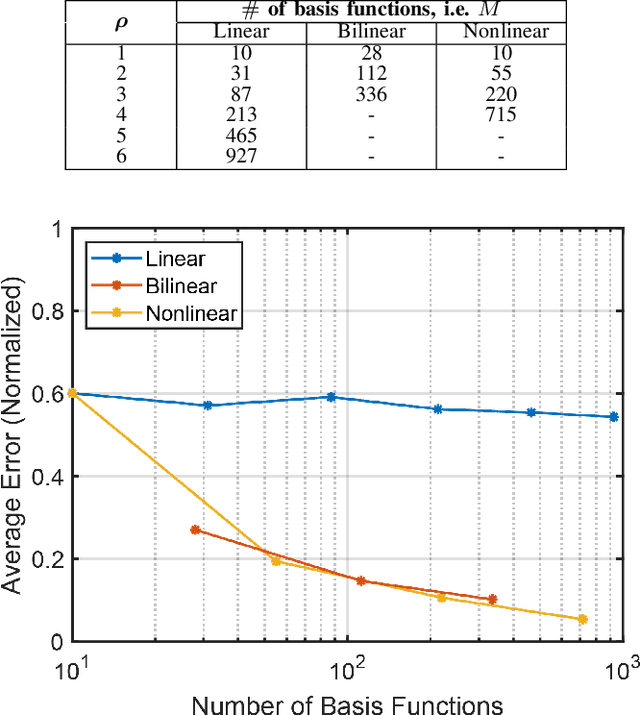
Nonlinear dynamical systems can be made easier to control by lifting them into the space of observable functions, where their evolution is described by the linear Koopman operator. This paper describes how the Koopman operator can be used to generate approximate linear, bilinear, and nonlinear model realizations from data, and argues in favor of bilinear realizations for characterizing systems with unknown dynamics. Necessary and sufficient conditions for a dynamical system to have a valid linear or bilinear realization over a given set of observable functions are presented and used to show that every control-affine system admits an infinite-dimensional bilinear realization, but does not necessarily admit a linear one. Therefore, approximate bilinear realizations constructed from generic sets of basis functions tend to improve as the number of basis functions increases, whereas approximate linear realizations may not. To demonstrate the advantages of bilinear Koopman realizations for control, a linear, bilinear, and nonlinear Koopman model realization of a simulated robot arm are constructed from data. In a trajectory following task, the bilinear realization exceeds the prediction accuracy of the linear realization and the computational efficiency of the nonlinear realization when incorporated into a model predictive control framework.
Trip Recovery in Lower-Limb Prostheses using Reachable Sets of Predicted Human Motion
Oct 21, 2020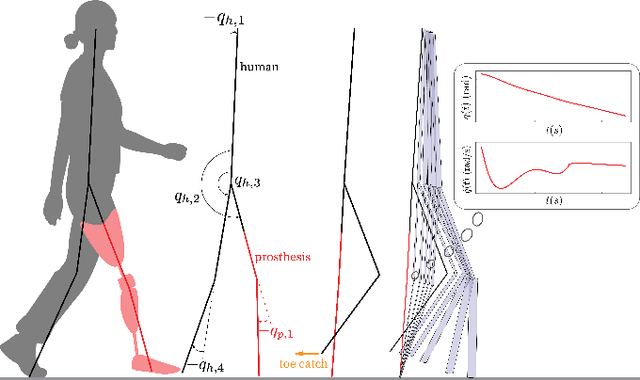
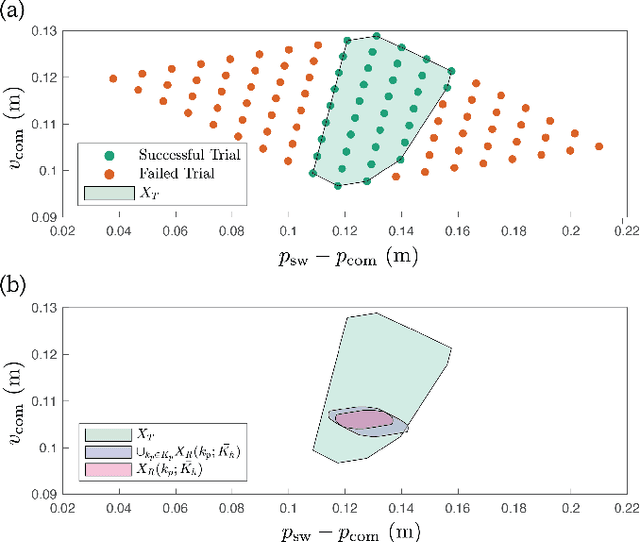
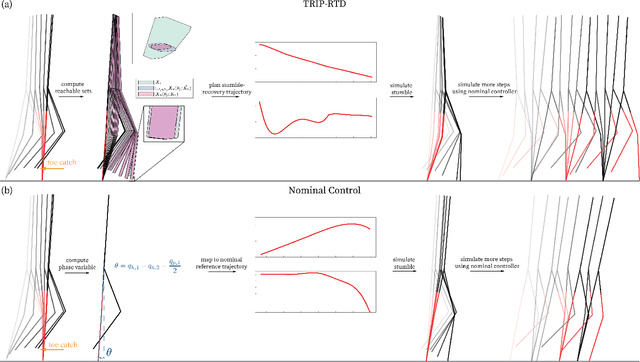
People with lower-limb loss, the majority of which use passive prostheses, exhibit a high incidence of falls each year. Powered lower-limb prostheses have the potential to reduce fall rates by actively helping the user recover from a stumble, but the unpredictability of the human response makes it difficult to design controllers that ensure a successful recovery. This paper presents a method called TRIP-RTD (Trip Recovery in Prostheses via Reachability-based Trajectory Design) for online trajectory planning in a knee prosthesis during and after a stumble that can accommodate a set of possible predictions of human behavior. Using this predicted set of human behavior, the proposed method computes a parameterized reachable set of trajectories for the human-prosthesis system. To ensure safety at run-time, TRIP-RTD selects a trajectory for the prosthesis that guarantees that all possible states of the human-prosthesis system at touchdown arrive in the basin of attraction of the nominal behavior of the system. In simulated stumble experiments where a nominal phase-based controller was unable to help the system recover, TRIP-RTD produced trajectories in under 101 ms that led to successful recoveries for all feasible solutions found.
BiTraP: Bi-directional Pedestrian Trajectory Prediction with Multi-modal Goal Estimation
Jul 29, 2020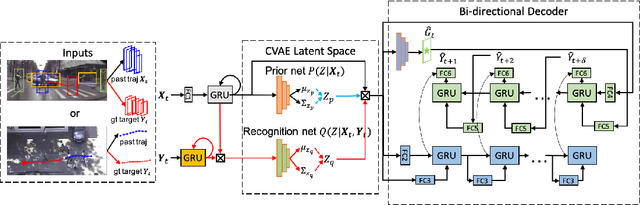
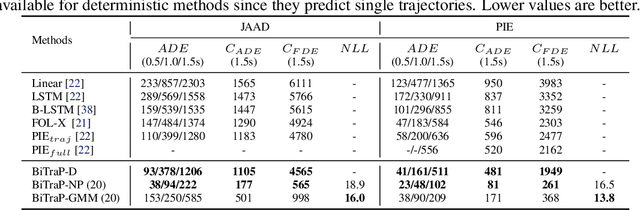
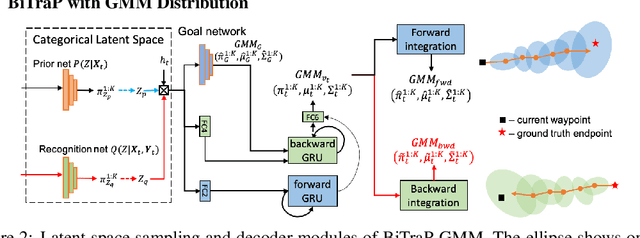
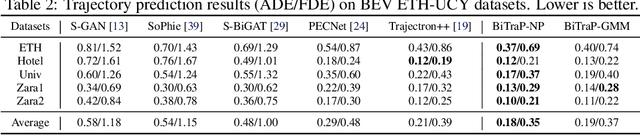
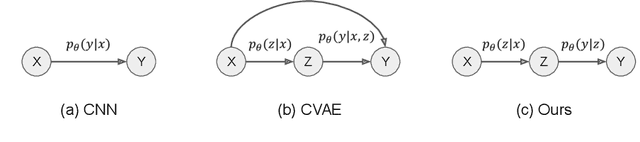
Pedestrian trajectory prediction is an essential task in robotic applications such as autonomous driving and robot navigation. State-of-the-art trajectory predictors use a conditional variational autoencoder (CVAE) with recurrent neural networks (RNNs) to encode observed trajectories and decode multi-modal future trajectories. This process can suffer from accumulated errors over long prediction horizons (>=2 seconds). This paper presents BiTraP, a goal-conditioned bi-directional multi-modal trajectory prediction method based on the CVAE. BiTraP estimates the goal (end-point) of trajectories and introduces a novel bi-directional decoder to improve longer-term trajectory prediction accuracy. Extensive experiments show that BiTraP generalizes to both first-person view (FPV) and bird's-eye view (BEV) scenarios and outperforms state-of-the-art results by ~10-50%. We also show that different choices of non-parametric versus parametric target models in the CVAE directly influence the predicted multi-modal trajectory distributions. These results provide guidance on trajectory predictor design for robotic applications such as collision avoidance and navigation systems.
Point Set Voting for Partial Point Cloud Analysis
Jul 09, 2020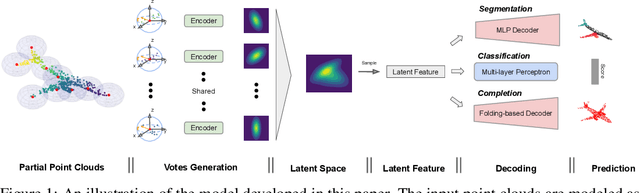
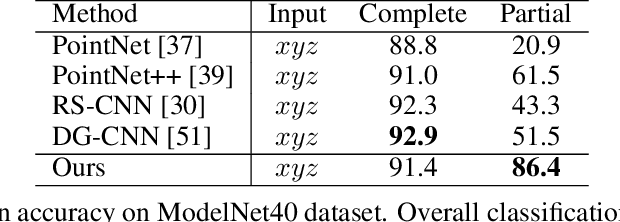
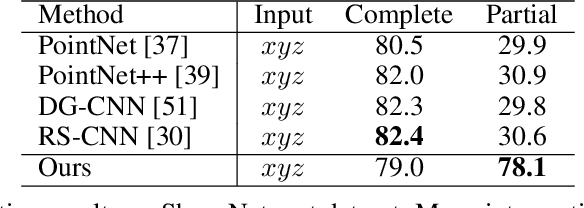
The continual improvement of 3D sensors has driven the development of algorithms to perform point cloud analysis. In fact, techniques for point cloud classification and segmentation have in recent years achieved incredible performance driven in part by leveraging large synthetic datasets. Unfortunately these same state-of-the-art approaches perform poorly when applied to incomplete point clouds. This limitation of existing algorithms is particularly concerning since point clouds generated by 3D sensors in the real world are usually incomplete due to perspective view or occlusion by other objects. This paper proposes a general model for partial point clouds analysis wherein the latent feature encoding a complete point clouds is inferred by applying a local point set voting strategy. In particular, each local point set constructs a vote that corresponds to a distribution in the latent space, and the optimal latent feature is the one with the highest probability. This approach ensures that any subsequent point cloud analysis is robust to partial observation while simultaneously guaranteeing that the proposed model is able to output multiple possible results. This paper illustrates that this proposed method achieves state-of-the-art performance on shape classification, part segmentation and point cloud completion.
Pixel-Wise Motion Deblurring of Thermal Videos
Jun 08, 2020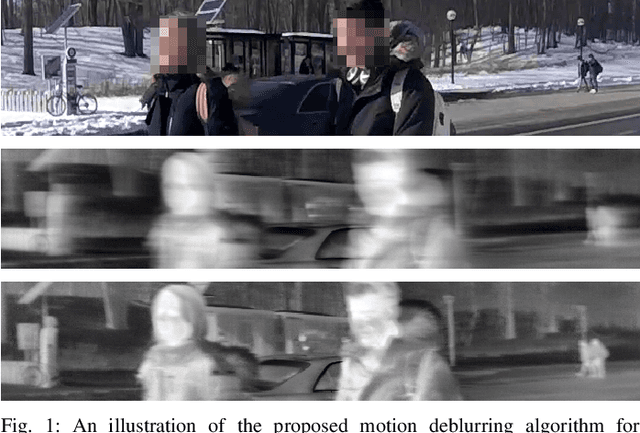
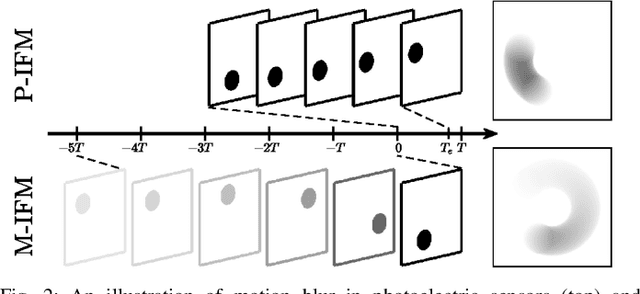
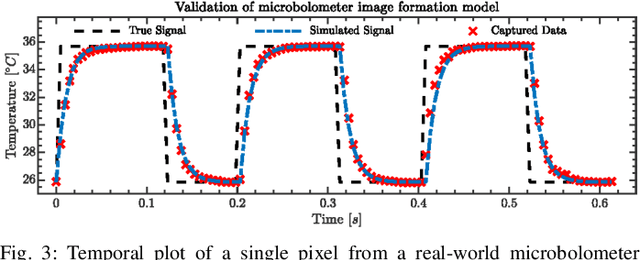
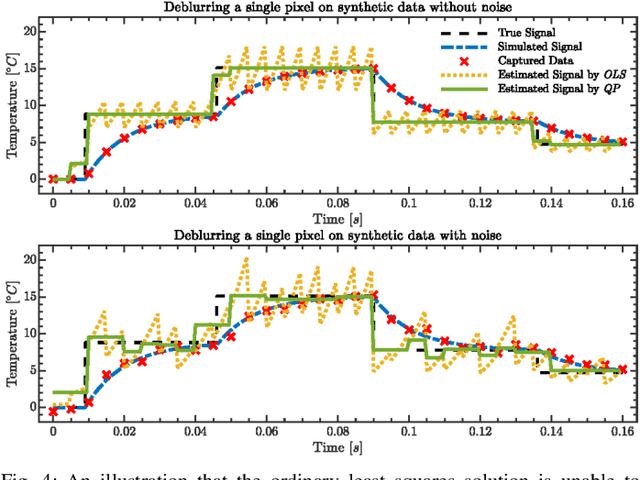
Uncooled microbolometers can enable robots to see in the absence of visible illumination by imaging the "heat" radiated from the scene. Despite this ability to see in the dark, these sensors suffer from significant motion blur. This has limited their application on robotic systems. As described in this paper, this motion blur arises due to the thermal inertia of each pixel. This has meant that traditional motion deblurring techniques, which rely on identifying an appropriate spatial blur kernel to perform spatial deconvolution, are unable to reliably perform motion deblurring on thermal camera images. To address this problem, this paper formulates reversing the effect of thermal inertia at a single pixel as a Least Absolute Shrinkage and Selection Operator (LASSO) problem which we can solve rapidly using a quadratic programming solver. By leveraging sparsity and a high frame rate, this pixel-wise LASSO formulation is able to recover motion deblurred frames of thermal videos without using any spatial information. To compare its quality against state-of-the-art visible camera based deblurring methods, this paper evaluated the performance of a family of pre-trained object detectors on a set of images restored by different deblurring algorithms. All evaluated object detectors performed systematically better on images restored by the proposed algorithm rather than any other tested, state-of-the-art methods.