 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFEAST: A Flexible Mealtime-Assistance System Towards In-the-Wild Personalization
Jun 17, 2025Physical caregiving robots hold promise for improving the quality of life of millions worldwide who require assistance with feeding. However, in-home meal assistance remains challenging due to the diversity of activities (e.g., eating, drinking, mouth wiping), contexts (e.g., socializing, watching TV), food items, and user preferences that arise during deployment. In this work, we propose FEAST, a flexible mealtime-assistance system that can be personalized in-the-wild to meet the unique needs of individual care recipients. Developed in collaboration with two community researchers and informed by a formative study with a diverse group of care recipients, our system is guided by three key tenets for in-the-wild personalization: adaptability, transparency, and safety. FEAST embodies these principles through: (i) modular hardware that enables switching between assisted feeding, drinking, and mouth-wiping, (ii) diverse interaction methods, including a web interface, head gestures, and physical buttons, to accommodate diverse functional abilities and preferences, and (iii) parameterized behavior trees that can be safely and transparently adapted using a large language model. We evaluate our system based on the personalization requirements identified in our formative study, demonstrating that FEAST offers a wide range of transparent and safe adaptations and outperforms a state-of-the-art baseline limited to fixed customizations. To demonstrate real-world applicability, we conduct an in-home user study with two care recipients (who are community researchers), feeding them three meals each across three diverse scenarios. We further assess FEAST's ecological validity by evaluating with an Occupational Therapist previously unfamiliar with the system. In all cases, users successfully personalize FEAST to meet their individual needs and preferences. Website: https://emprise.cs.cornell.edu/feast
Coloring Between the Lines: Personalization in the Null Space of Planning Constraints
May 21, 2025



Generalist robots must personalize in-the-wild to meet the diverse needs and preferences of long-term users. How can we enable flexible personalization without sacrificing safety or competency? This paper proposes Coloring Between the Lines (CBTL), a method for personalization that exploits the null space of constraint satisfaction problems (CSPs) used in robot planning. CBTL begins with a CSP generator that ensures safe and competent behavior, then incrementally personalizes behavior by learning parameterized constraints from online interaction. By quantifying uncertainty and leveraging the compositionality of planning constraints, CBTL achieves sample-efficient adaptation without environment resets. We evaluate CBTL in (1) three diverse simulation environments; (2) a web-based user study; and (3) a real-robot assisted feeding system, finding that CBTL consistently achieves more effective personalization with fewer interactions than baselines. Our results demonstrate that CBTL provides a unified and practical approach for continual, flexible, active, and safe robot personalization. Website: https://emprise.cs.cornell.edu/cbtl/
Kiri-Spoon: A Kirigami Utensil for Robot-Assisted Feeding
Jan 02, 2025



For millions of adults with mobility limitations, eating meals is a daily challenge. A variety of robotic systems have been developed to address this societal need. Unfortunately, end-user adoption of robot-assisted feeding is limited, in part because existing devices are unable to seamlessly grasp, manipulate, and feed diverse foods. Recent works seek to address this issue by creating new algorithms for food acquisition and bite transfer. In parallel to these algorithmic developments, however, we hypothesize that mechanical intelligence will make it fundamentally easier for robot arms to feed humans. We therefore propose Kiri-Spoon, a soft utensil specifically designed for robot-assisted feeding. Kiri-Spoon consists of a spoon-shaped kirigami structure: when actuated, the kirigami sheet deforms into a bowl of increasing curvature. Robot arms equipped with Kiri-Spoon can leverage the kirigami structure to wrap-around morsels during acquisition, contain those items as the robot moves, and then compliantly release the food into the user's mouth. Overall, Kiri-Spoon combines the familiar and comfortable shape of a standard spoon with the increased capabilities of soft robotic grippers. In what follows, we first apply a stakeholder-driven design process to ensure that Kiri-Spoon meets the needs of caregivers and users with physical disabilities. We next characterize the dynamics of Kiri-Spoon, and derive a mechanics model to relate actuation force to the spoon's shape. The paper concludes with three separate experiments that evaluate (a) the mechanical advantage provided by Kiri-Spoon, (b) the ways users with disabilities perceive our system, and (c) how the mechanical intelligence of Kiri-Spoon complements state-of-the-art algorithms. Our results suggest that Kiri-Spoon advances robot-assisted feeding across diverse foods, multiple robotic platforms, and different manipulation algorithms.
FLAIR: Feeding via Long-horizon AcquIsition of Realistic dishes
Jul 10, 2024



Robot-assisted feeding has the potential to improve the quality of life for individuals with mobility limitations who are unable to feed themselves independently. However, there exists a large gap between the homogeneous, curated plates existing feeding systems can handle, and truly in-the-wild meals. Feeding realistic plates is immensely challenging due to the sheer range of food items that a robot may encounter, each requiring specialized manipulation strategies which must be sequenced over a long horizon to feed an entire meal. An assistive feeding system should not only be able to sequence different strategies efficiently in order to feed an entire meal, but also be mindful of user preferences given the personalized nature of the task. We address this with FLAIR, a system for long-horizon feeding which leverages the commonsense and few-shot reasoning capabilities of foundation models, along with a library of parameterized skills, to plan and execute user-preferred and efficient bite sequences. In real-world evaluations across 6 realistic plates, we find that FLAIR can effectively tap into a varied library of skills for efficient food pickup, while adhering to the diverse preferences of 42 participants without mobility limitations as evaluated in a user study. We demonstrate the seamless integration of FLAIR with existing bite transfer methods [19, 28], and deploy it across 2 institutions and 3 robots, illustrating its adaptability. Finally, we illustrate the real-world efficacy of our system by successfully feeding a care recipient with severe mobility limitations. Supplementary materials and videos can be found at: https://emprise.cs.cornell.edu/flair .
To Ask or Not To Ask: Human-in-the-loop Contextual Bandits with Applications in Robot-Assisted Feeding
May 11, 2024



Robot-assisted bite acquisition involves picking up food items that vary in their shape, compliance, size, and texture. A fully autonomous strategy for bite acquisition is unlikely to efficiently generalize to this wide variety of food items. We propose to leverage the presence of the care recipient to provide feedback when the system encounters novel food items. However, repeatedly asking for help imposes cognitive workload on the user. In this work, we formulate human-in-the-loop bite acquisition within a contextual bandit framework and propose a novel method, LinUCB-QG, that selectively asks for help. This method leverages a predictive model of cognitive workload in response to different types and timings of queries, learned using data from 89 participants collected in an online user study. We demonstrate that this method enhances the balance between task performance and cognitive workload compared to autonomous and querying baselines, through experiments in a food dataset-based simulator and a user study with 18 participants without mobility limitations.
An Adaptable, Safe, and Portable Robot-Assisted Feeding System
Mar 07, 2024


We demonstrate a robot-assisted feeding system that enables people with mobility impairments to feed themselves. Our system design embodies Safety, Portability, and User Control, with comprehensive full-stack safety checks, the ability to be mounted on and powered by any powered wheelchair, and a custom web-app allowing care-recipients to leverage their own assistive devices for robot control. For bite acquisition, we leverage multi-modal online learning to tractably adapt to unseen food types. For bite transfer, we leverage real-time mouth perception and interaction-aware control. Co-designed with community researchers, our system has been validated through multiple end-user studies.
Feel the Bite: Robot-Assisted Inside-Mouth Bite Transfer using Robust Mouth Perception and Physical Interaction-Aware Control
Mar 06, 2024Robot-assisted feeding can greatly enhance the lives of those with mobility limitations. Modern feeding systems can pick up and position food in front of a care recipient's mouth for a bite. However, many with severe mobility constraints cannot lean forward and need direct inside-mouth food placement. This demands precision, especially for those with restricted mouth openings, and appropriately reacting to various physical interactions - incidental contacts as the utensil moves inside, impulsive contacts due to sudden muscle spasms, deliberate tongue maneuvers by the person being fed to guide the utensil, and intentional bites. In this paper, we propose an inside-mouth bite transfer system that addresses these challenges with two key components: a multi-view mouth perception pipeline robust to tool occlusion, and a control mechanism that employs multimodal time-series classification to discern and react to different physical interactions. We demonstrate the efficacy of these individual components through two ablation studies. In a full system evaluation, our system successfully fed 13 care recipients with diverse mobility challenges. Participants consistently emphasized the comfort and safety of our inside-mouth bite transfer system, and gave it high technology acceptance ratings - underscoring its transformative potential in real-world scenarios. Supplementary materials and videos can be found at http://emprise.cs.cornell.edu/bitetransfer/ .
RCareWorld: A Human-centric Simulation World for Caregiving Robots
Oct 19, 2022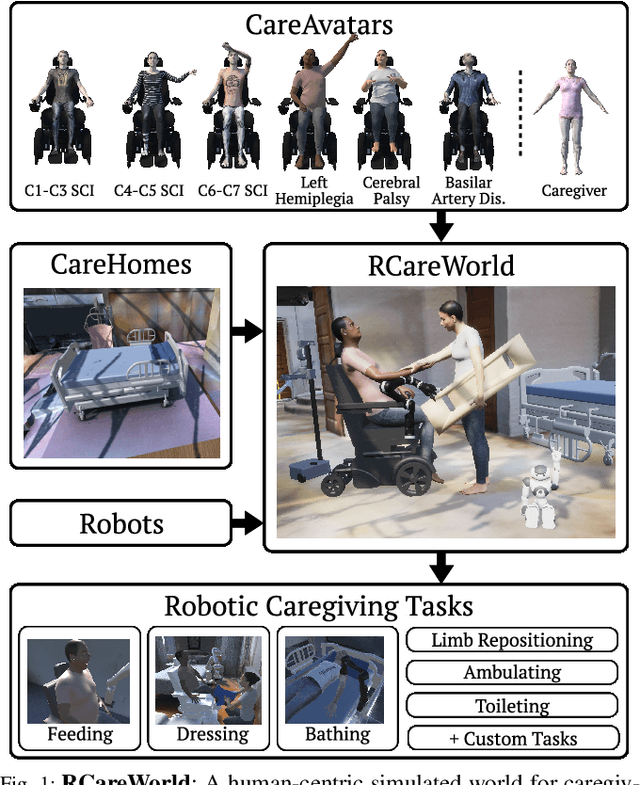
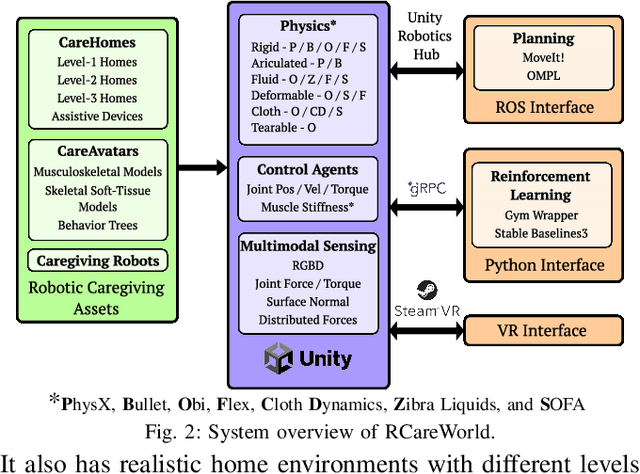
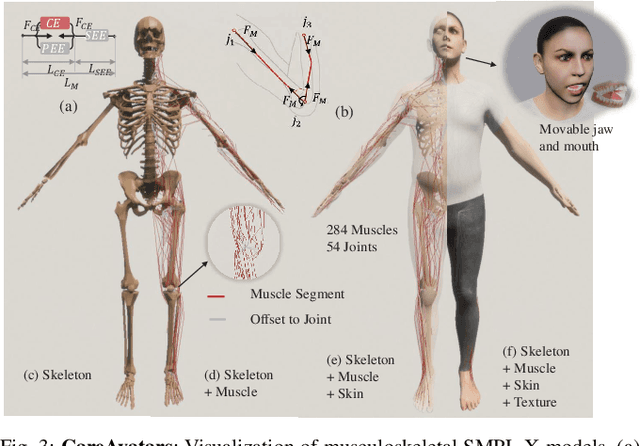
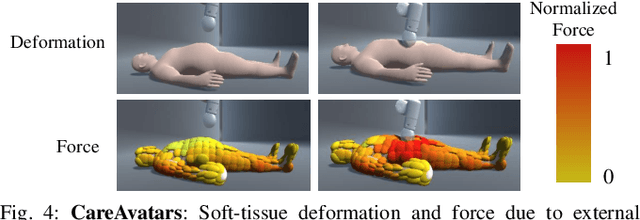
We present RCareWorld, a human-centric simulation world for physical and social robotic caregiving designed with inputs from stakeholders, including care recipients, caregivers, occupational therapists, and roboticists. RCareWorld has realistic human models of care recipients with mobility limitations and caregivers, home environments with multiple levels of accessibility and assistive devices, and robots commonly used for caregiving. It interfaces with various physics engines to model diverse material types necessary for simulating caregiving scenarios, and provides the capability to plan, control, and learn both human and robot control policies by integrating with state-of-the-art external planning and learning libraries, and VR devices. We propose a set of realistic caregiving tasks in RCareWorld as a benchmark for physical robotic caregiving and provide baseline control policies for them. We illustrate the high-fidelity simulation capabilities of RCareWorld by demonstrating the execution of a policy learnt in simulation for one of these tasks on a real-world setup. Additionally, we perform a real-world social robotic caregiving experiment using behaviors modeled in RCareWorld. Robotic caregiving, though potentially impactful towards enhancing the quality of life of care recipients and caregivers, is a field with many barriers to entry due to its interdisciplinary facets. RCareWorld takes the first step towards building a realistic simulation world for robotic caregiving that would enable researchers worldwide to contribute to this impactful field. Demo videos and supplementary materials can be found at: https://emprise.cs.cornell.edu/rcareworld/.
Robotic Motion Planning using Learned Critical Sources and Local Sampling
Jun 07, 2020
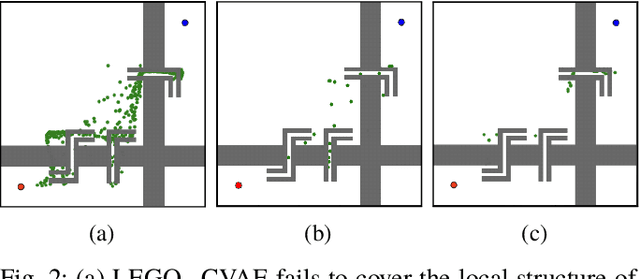
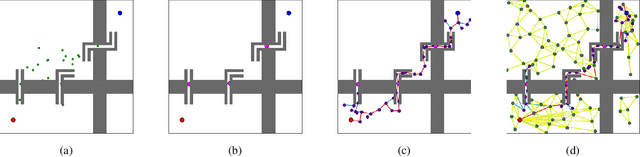
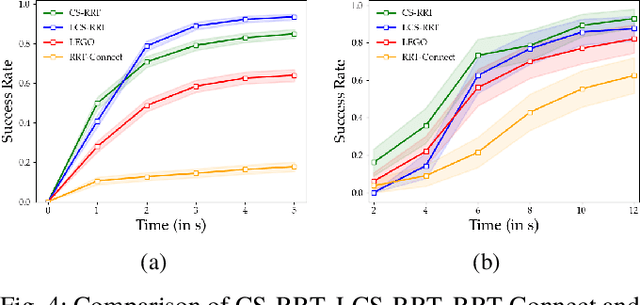
Sampling based methods are widely used for robotic motion planning. Traditionally, these samples are drawn from probabilistic ( or deterministic ) distributions to cover the state space uniformly. Despite being probabilistically complete, they fail to find a feasible path in a reasonable amount of time in constrained environments where it is essential to go through narrow passages (bottleneck regions). Current state of the art techniques train a learning model (learner) to predict samples selectively on these bottleneck regions. However, these algorithms depend completely on samples generated by this learner to navigate through the bottleneck regions. As the complexity of the planning problem increases, the amount of data and time required to make this learner robust to fine variations in the structure of the workspace becomes computationally intractable. In this work, we present (1) an efficient and robust method to use a learner to locate the bottleneck regions and (2) two algorithms that use local sampling methods to leverage the location of these bottleneck regions for efficient motion planning while maintaining probabilistic completeness. We test our algorithms on 2 dimensional planning problems and 7 dimensional robotic arm planning, and report significant gains over heuristics as well as learned baselines.