 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Threats, Focused Defense: Criticality-Aware Robust Reinforcement Learning for Safe Autonomous Driving
Jan 05, 2026Reinforcement learning (RL) has shown considerable potential in autonomous driving (AD), yet its vulnerability to perturbations remains a critical barrier to real-world deployment. As a primary countermeasure, adversarial training improves policy robustness by training the AD agent in the presence of an adversary that deliberately introduces perturbations. Existing approaches typically model the interaction as a zero-sum game with continuous attacks. However, such designs overlook the inherent asymmetry between the agent and the adversary and then fail to reflect the sparsity of safety-critical risks, rendering the achieved robustness inadequate for practical AD scenarios. To address these limitations, we introduce criticality-aware robust RL (CARRL), a novel adversarial training approach for handling sparse, safety-critical risks in autonomous driving. CARRL consists of two interacting components: a risk exposure adversary (REA) and a risk-targeted robust agent (RTRA). We model the interaction between the REA and RTRA as a general-sum game, allowing the REA to focus on exposing safety-critical failures (e.g., collisions) while the RTRA learns to balance safety with driving efficiency. The REA employs a decoupled optimization mechanism to better identify and exploit sparse safety-critical moments under a constrained budget. However, such focused attacks inevitably result in a scarcity of adversarial data. The RTRA copes with this scarcity by jointly leveraging benign and adversarial experiences via a dual replay buffer and enforces policy consistency under perturbations to stabilize behavior. Experimental results demonstrate that our approach reduces the collision rate by at least 22.66\% across all cases compared to state-of-the-art baseline methods.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025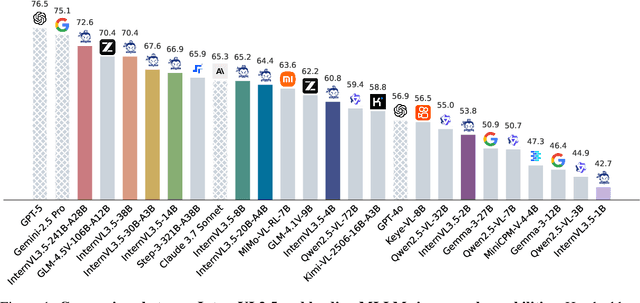
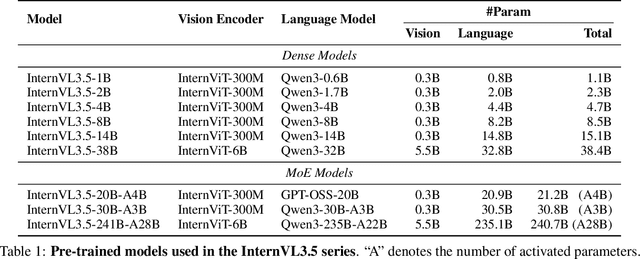
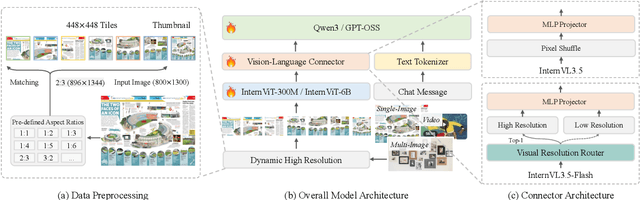
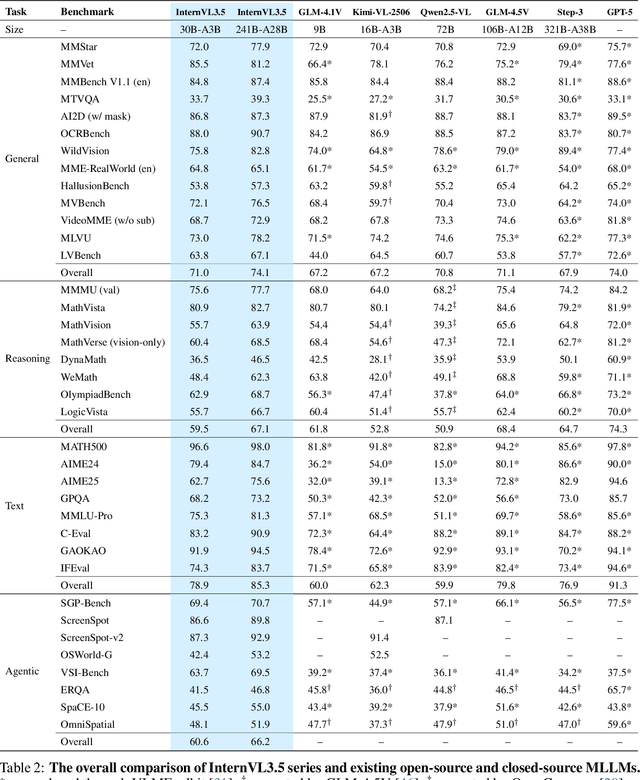
We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
Mapping at First Sense: A Lightweight Neural Network-Based Indoor Structures Prediction Method for Robot Autonomous Exploration
Apr 05, 2025Autonomous exploration in unknown environments is a critical challenge in robotics, particularly for applications such as indoor navigation, search and rescue, and service robotics. Traditional exploration strategies, such as frontier-based methods, often struggle to efficiently utilize prior knowledge of structural regularities in indoor spaces. To address this limitation, we propose Mapping at First Sense, a lightweight neural network-based approach that predicts unobserved areas in local maps, thereby enhancing exploration efficiency. The core of our method, SenseMapNet, integrates convolutional and transformerbased architectures to infer occluded regions while maintaining computational efficiency for real-time deployment on resourceconstrained robots. Additionally, we introduce SenseMapDataset, a curated dataset constructed from KTH and HouseExpo environments, which facilitates training and evaluation of neural models for indoor exploration. Experimental results demonstrate that SenseMapNet achieves an SSIM (structural similarity) of 0.78, LPIPS (perceptual quality) of 0.68, and an FID (feature distribution alignment) of 239.79, outperforming conventional methods in map reconstruction quality. Compared to traditional frontier-based exploration, our method reduces exploration time by 46.5% (from 2335.56s to 1248.68s) while maintaining a high coverage rate (88%) and achieving a reconstruction accuracy of 88%. The proposed method represents a promising step toward efficient, learning-driven robotic exploration in structured environments.
SenseExpo: Efficient Autonomous Exploration with Prediction Information from Lightweight Neural Networks
Mar 20, 2025This paper proposes SenseExpo, an efficient autonomous exploration framework based on a lightweight prediction network, which addresses the limitations of traditional methods in computational overhead and environmental generalization. By integrating Generative Adversarial Networks (GANs), Transformer, and Fast Fourier Convolution (FFC), we designed a lightweight prediction model with merely 709k parameters. Our smallest model achieves better performance on the KTH dataset than U-net (24.5M) and LaMa (51M), delivering PSNR 9.026 and SSIM 0.718, particularly representing a 38.7% PSNR improvement over the 51M-parameter LaMa model. Cross-domain testing demonstrates its strong generalization capability, with an FID score of 161.55 on the HouseExpo dataset, significantly outperforming comparable methods. Regarding exploration efficiency, on the KTH dataset,SenseExpo demonstrates approximately a 67.9% time reduction in exploration time compared to MapEx. On the MRPB 1.0 dataset, SenseExpo achieves 77.1% time reduction roughly compared to MapEx. Deployed as a plug-and-play ROS node, the framework seamlessly integrates with existing navigation systems, providing an efficient solution for resource-constrained devices.
Candidate Pseudolabel Learning: Enhancing Vision-Language Models by Prompt Tuning with Unlabeled Data
Jun 15, 2024Fine-tuning vision-language models (VLMs) with abundant unlabeled data recently has attracted increasing attention. Existing methods that resort to the pseudolabeling strategy would suffer from heavily incorrect hard pseudolabels when VLMs exhibit low zero-shot performance in downstream tasks. To alleviate this issue, we propose a Candidate Pseudolabel Learning method, termed CPL, to fine-tune VLMs with suitable candidate pseudolabels of unlabeled data in downstream tasks. The core of our method lies in the generation strategy of candidate pseudolabels, which progressively generates refined candidate pseudolabels by both intra- and inter-instance label selection, based on a confidence score matrix for all unlabeled data. This strategy can result in better performance in true label inclusion and class-balanced instance selection. In this way, we can directly apply existing loss functions to learn with generated candidate psueudolabels. Extensive experiments on nine benchmark datasets with three learning paradigms demonstrate the effectiveness of our method. Our code can be found at https://github.com/vanillaer/CPL-ICML2024.
BDetCLIP: Multimodal Prompting Contrastive Test-Time Backdoor Detection
May 24, 2024Multimodal contrastive learning methods (e.g., CLIP) have shown impressive zero-shot classification performance due to their strong ability to joint representation learning for visual and textual modalities. However, recent research revealed that multimodal contrastive learning on poisoned pre-training data with a small proportion of maliciously backdoored data can induce backdoored CLIP that could be attacked by inserted triggers in downstream tasks with a high success rate. To defend against backdoor attacks on CLIP, existing defense methods focus on either the pre-training stage or the fine-tuning stage, which would unfortunately cause high computational costs due to numerous parameter updates. In this paper, we provide the first attempt at a computationally efficient backdoor detection method to defend against backdoored CLIP in the inference stage. We empirically find that the visual representations of backdoored images are insensitive to both benign and malignant changes in class description texts. Motivated by this observation, we propose BDetCLIP, a novel test-time backdoor detection method based on contrastive prompting. Specifically, we first prompt the language model (e.g., GPT-4) to produce class-related description texts (benign) and class-perturbed random texts (malignant) by specially designed instructions. Then, the distribution difference in cosine similarity between images and the two types of class description texts can be used as the criterion to detect backdoor samples. Extensive experiments validate that our proposed BDetCLIP is superior to state-of-the-art backdoor detection methods, in terms of both effectiveness and efficiency.
Empirical Studies of Propagation Characteristics and Modeling Based on XL-MIMO Channel Measurement: From Far-Field to Near-Field
Apr 26, 2024In the sixth-generation (6G), the extremely large-scale multiple-input-multiple-output (XL-MIMO) is considered a promising enabling technology. With the further expansion of array element number and frequency bands, near-field effects will be more likely to occur in 6G communication systems. The near-field radio communications (NFRC) will become crucial in 6G communication systems. It is known that the channel research is very important for the development and performance evaluation of the communication systems. In this paper, we will systematically investigate the channel measurements and modeling for the emerging NFRC. First, the principle design of massive MIMO channel measurement platform are solved. Second, an indoor XL-MIMO channel measurement campaign with 1600 array elements is conducted, and the channel characteristics are extracted and validated in the near-field region. Then, the outdoor XL-MIMO channel measurement campaign with 320 array elements is conducted, and the channel characteristics are extracted and modeled from near-field to far-field (NF-FF) region. The spatial non-stationary characteristics of angular spread at the transmitting end are more important in modeling. We hope that this work will give some reference to the near-field and far-field research for 6G.
Debiased Sample Selection for Combating Noisy Labels
Jan 25, 2024



Learning with noisy labels aims to ensure model generalization given a label-corrupted training set. The sample selection strategy achieves promising performance by selecting a label-reliable subset for model training. In this paper, we empirically reveal that existing sample selection methods suffer from both data and training bias that are represented as imbalanced selected sets and accumulation errors in practice, respectively. However, only the training bias was handled in previous studies. To address this limitation, we propose a noIse-Tolerant Expert Model (ITEM) for debiased learning in sample selection. Specifically, to mitigate the training bias, we design a robust network architecture that integrates with multiple experts. Compared with the prevailing double-branch network, our network exhibits better performance of selection and prediction by ensembling these experts while training with fewer parameters. Meanwhile, to mitigate the data bias, we propose a mixed sampling strategy based on two weight-based data samplers. By training on the mixture of two class-discriminative mini-batches, the model mitigates the effect of the imbalanced training set while avoiding sparse representations that are easily caused by sampling strategies. Extensive experiments and analyses demonstrate the effectiveness of ITEM. Our code is available at this url \href{https://github.com/1998v7/ITEM}{ITEM}.
Improving Generalization in Meta-Learning via Meta-Gradient Augmentation
Jun 14, 2023



Meta-learning methods typically follow a two-loop framework, where each loop potentially suffers from notorious overfitting, hindering rapid adaptation and generalization to new tasks. Existing schemes solve it by enhancing the mutual-exclusivity or diversity of training samples, but these data manipulation strategies are data-dependent and insufficiently flexible. This work alleviates overfitting in meta-learning from the perspective of gradient regularization and proposes a data-independent \textbf{M}eta-\textbf{G}radient \textbf{Aug}mentation (\textbf{MGAug}) method. The key idea is to first break the rote memories by network pruning to address memorization overfitting in the inner loop, and then the gradients of pruned sub-networks naturally form the high-quality augmentation of the meta-gradient to alleviate learner overfitting in the outer loop. Specifically, we explore three pruning strategies, including \textit{random width pruning}, \textit{random parameter pruning}, and a newly proposed \textit{catfish pruning} that measures a Meta-Memorization Carrying Amount (MMCA) score for each parameter and prunes high-score ones to break rote memories as much as possible. The proposed MGAug is theoretically guaranteed by the generalization bound from the PAC-Bayes framework. In addition, we extend a lightweight version, called MGAug-MaxUp, as a trade-off between performance gains and resource overhead. Extensive experiments on multiple few-shot learning benchmarks validate MGAug's effectiveness and significant improvement over various meta-baselines. The code is publicly available at \url{https://github.com/xxLifeLover/Meta-Gradient-Augmentation}.
Fine-Grained Classification with Noisy Labels
Mar 04, 2023



Learning with noisy labels (LNL) aims to ensure model generalization given a label-corrupted training set. In this work, we investigate a rarely studied scenario of LNL on fine-grained datasets (LNL-FG), which is more practical and challenging as large inter-class ambiguities among fine-grained classes cause more noisy labels. We empirically show that existing methods that work well for LNL fail to achieve satisfying performance for LNL-FG, arising the practical need of effective solutions for LNL-FG. To this end, we propose a novel framework called stochastic noise-tolerated supervised contrastive learning (SNSCL) that confronts label noise by encouraging distinguishable representation. Specifically, we design a noise-tolerated supervised contrastive learning loss that incorporates a weight-aware mechanism for noisy label correction and selectively updating momentum queue lists. By this mechanism, we mitigate the effects of noisy anchors and avoid inserting noisy labels into the momentum-updated queue. Besides, to avoid manually-defined augmentation strategies in contrastive learning, we propose an efficient stochastic module that samples feature embeddings from a generated distribution, which can also enhance the representation ability of deep models. SNSCL is general and compatible with prevailing robust LNL strategies to improve their performance for LNL-FG. Extensive experiments demonstrate the effectiveness of SNSCL.