 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Closed-Loop Performance of Latent World Models: Offline Checkpoint Selection for MPC and Model-Based RL Under Non-Markovian Rewards in LunarLander
Jul 02, 2026We study how to predict the downstream closed-loop performance of a learned latent world model from validation-time diagnostics alone. Choosing the right checkpoint from a world-model training run is difficult: validation loss and multi-step prediction RMSE keep improving long after closed-loop performance has collapsed. We present a suite of structural validation-time diagnostics drawn from optimal-control theory and apply them to Gymnasium's LunarLander v3, which features shaped rewards. We train an RSSM [5, 4] world model on it and treat per checkpoint CEM-MPC return as the oracle for closed-loop quality. By evaluating 40 metrics against this oracle, we find that the strongest single predictor is the Reward Observability Fraction (ROF), which measures the reward predictor's dependence on the observable subspace. We combine ROF with three structural regularizers into a single-number offline checkpoint selection score, the Composite Reward Observability Fraction (CROF). The CROF-selected world model trains a model-based A2C policy that beats a fairly evaluated model-free A2C baseline by ~24.5 return points while using ~65x fewer real-environment interactions, and the same world model also drives a strong zero-shot CEM-MPC policy. Code and data: https://github.com/nsmoly/LunarLander_RSSM.
Planning-aligned Token Compression for Long-Context Autonomous Driving
Jun 05, 2026Monolithic vision-action models represent an emerging paradigm in autonomous driving. However, this architecture produces token sequences that quickly exceed real-time computational budgets when encoding extended temporal context for complex interactions. While approaches like linear transformers and external memory try to make the context lightweight, token compression is most compatible with the architecture as it requires no backbone modifications. Yet existing compression adopts rule-based heuristics like temporal decay, decoupled from planning, risking loss of decision-critical information. We propose COMPACT-VA, a planning-aligned working memory framework built on conditional VQ-VAE, compressing extended context into bounded representations. Compression is conditioned on both historical trajectory and a learned planning intent that the posterior encoder distills from future trajectories during training, while the prior encoder learns to predict it from compressed observations. The compressed memory, concatenated with the predicted latent, feeds the policy for end-to-end optimization, planning with retained decision-critical information. We evaluate on high-signal dynamic scenarios where historical context is most critical for behavior correctness (e.g., stop, yield, or proceed), and accordingly design behavioral metrics. Under comparable token budgets, we achieve $>$6% improvement (68.3%) on success rates with consistent gains across metrics. Ablations validate planning-aligned coupling effectiveness. Closed-loop evaluation confirms that COMPACT-VA maintained general driving performance with 3.3* speedup and 2.7* memory reduction over uncompressed processing.
NVRadarNet: Real-Time Radar Obstacle and Free Space Detection for Autonomous Driving
Sep 29, 2022
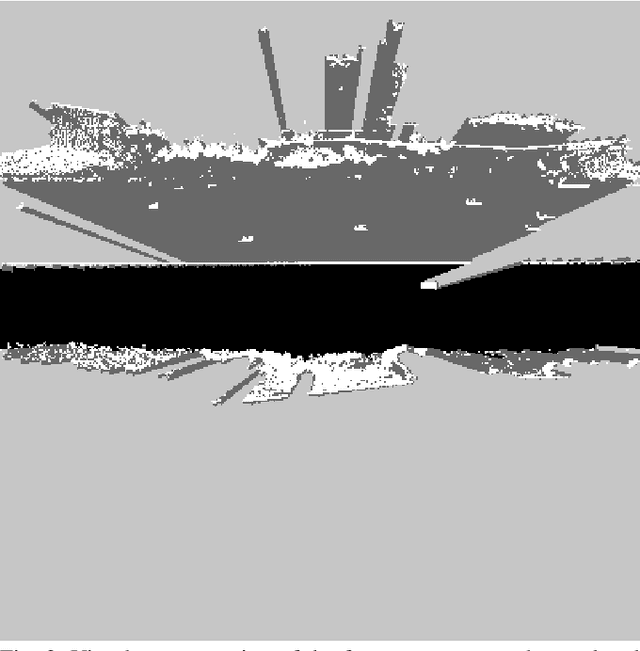
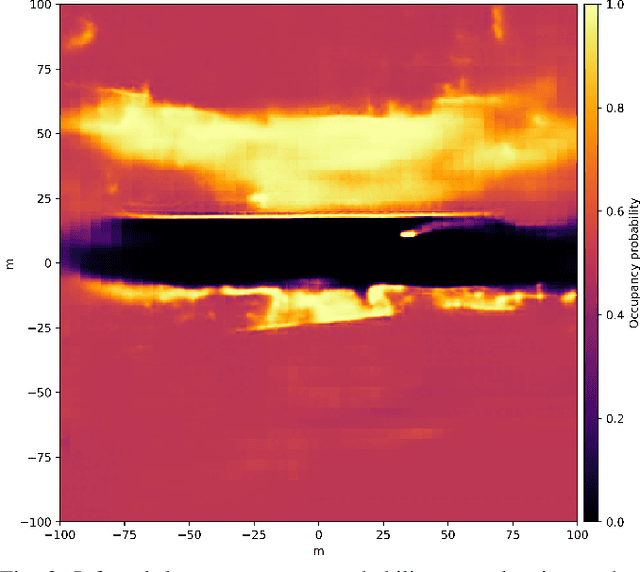
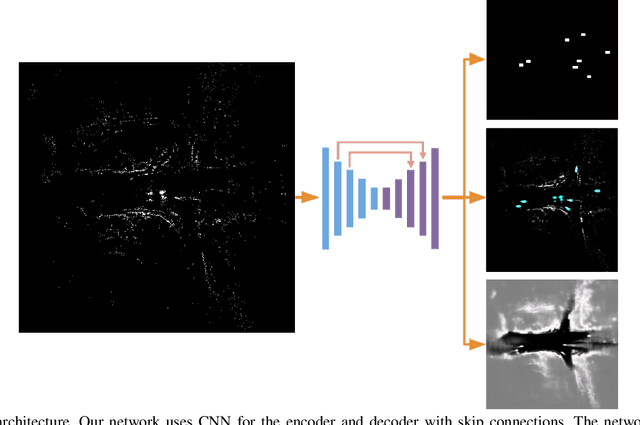
Detecting obstacles is crucial for safe and efficient autonomous driving. To this end, we present NVRadarNet, a deep neural network (DNN) that detects dynamic obstacles and drivable free space using automotive RADAR sensors. The network utilizes temporally accumulated data from multiple RADAR sensors to detect dynamic obstacles and compute their orientation in a top-down bird's-eye view (BEV). The network also regresses drivable free space to detect unclassified obstacles. Our DNN is the first of its kind to utilize sparse RADAR signals in order to perform obstacle and free space detection in real time from RADAR data only. The network has been successfully used for perception on our autonomous vehicles in real self-driving scenarios. The network runs faster than real time on an embedded GPU and shows good generalization across geographic regions.
PredictionNet: Real-Time Joint Probabilistic Traffic Prediction for Planning, Control, and Simulation
Sep 23, 2021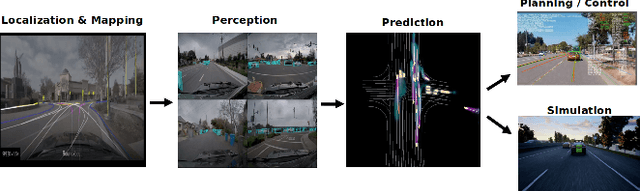
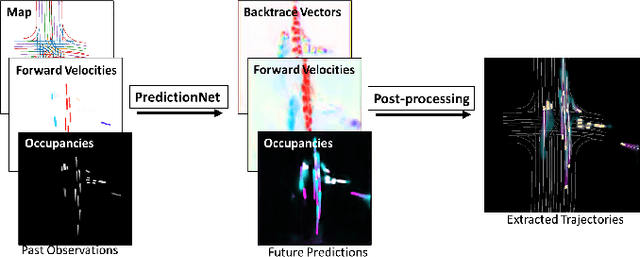
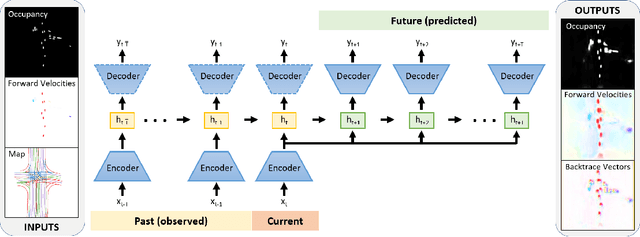
Predicting the future motion of traffic agents is crucial for safe and efficient autonomous driving. To this end, we present PredictionNet, a deep neural network (DNN) that predicts the motion of all surrounding traffic agents together with the ego-vehicle's motion. All predictions are probabilistic and are represented in a simple top-down rasterization that allows an arbitrary number of agents. Conditioned on a multilayer map with lane information, the network outputs future positions, velocities, and backtrace vectors jointly for all agents including the ego-vehicle in a single pass. Trajectories are then extracted from the output. The network can be used to simulate realistic traffic, and it produces competitive results on popular benchmarks. More importantly, it has been used to successfully control a real-world vehicle for hundreds of kilometers, by combining it with a motion planning/control subsystem. The network runs faster than real-time on an embedded GPU, and the system shows good generalization (across sensory modalities and locations) due to the choice of input representation. Furthermore, we demonstrate that by extending the DNN with reinforcement learning (RL), it can better handle rare or unsafe events like aggressive maneuvers and crashes.
Deep Two-View Structure-from-Motion Revisited
Apr 01, 2021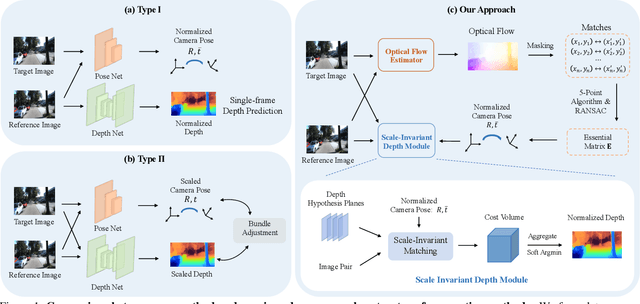
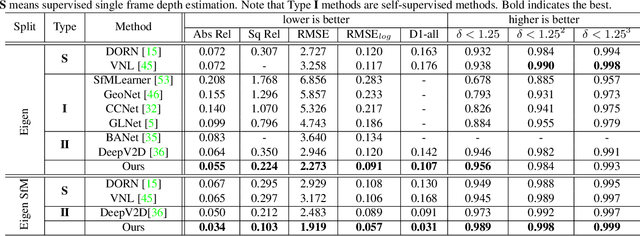
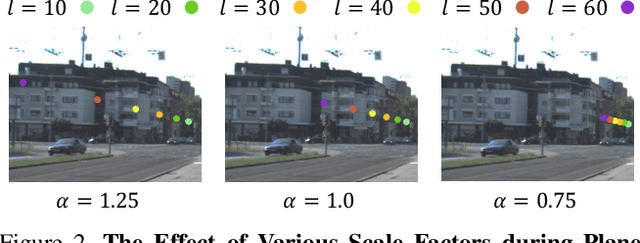

Two-view structure-from-motion (SfM) is the cornerstone of 3D reconstruction and visual SLAM. Existing deep learning-based approaches formulate the problem by either recovering absolute pose scales from two consecutive frames or predicting a depth map from a single image, both of which are ill-posed problems. In contrast, we propose to revisit the problem of deep two-view SfM by leveraging the well-posedness of the classic pipeline. Our method consists of 1) an optical flow estimation network that predicts dense correspondences between two frames; 2) a normalized pose estimation module that computes relative camera poses from the 2D optical flow correspondences, and 3) a scale-invariant depth estimation network that leverages epipolar geometry to reduce the search space, refine the dense correspondences, and estimate relative depth maps. Extensive experiments show that our method outperforms all state-of-the-art two-view SfM methods by a clear margin on KITTI depth, KITTI VO, MVS, Scenes11, and SUN3D datasets in both relative pose and depth estimation.
MVLidarNet: Real-Time Multi-Class Scene Understanding for Autonomous Driving Using Multiple Views
Jun 09, 2020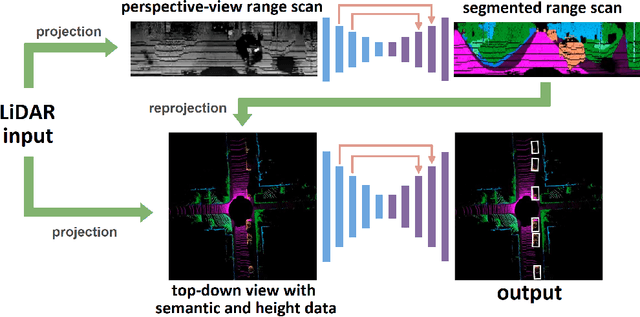
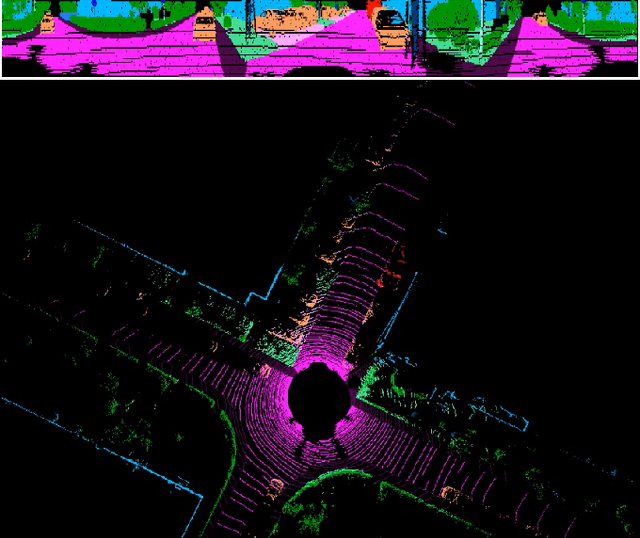
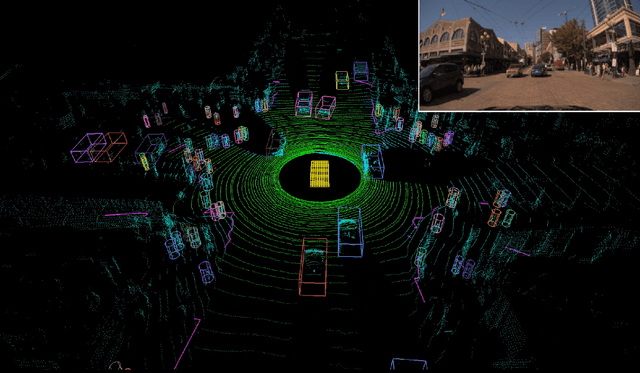
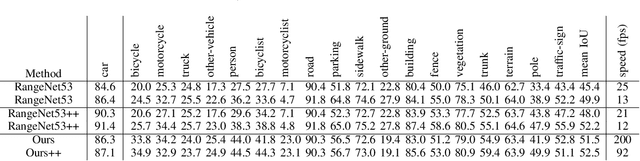
Autonomous driving requires the inference of actionable information such as detecting and classifying objects, and determining the drivable space. To this end, we present a two-stage deep neural network (MVLidarNet) for multi-class object detection and drivable segmentation using multiple views of a single LiDAR point cloud. The first stage processes the point cloud projected onto a perspective view in order to semantically segment the scene. The second stage then processes the point cloud (along with semantic labels from the first stage) projected onto a bird's eye view, to detect and classify objects. Both stages are simple encoder-decoders. We show that our multi-view, multi-stage, multi-class approach is able to detect and classify objects while simultaneously determining the drivable space using a single LiDAR scan as input, in challenging scenes with more than one hundred vehicles and pedestrians at a time. The system operates efficiently at 150 fps on an embedded GPU designed for a self-driving car, including a postprocessing step to maintain identities over time. We show results on both KITTI and a much larger internal dataset, thus demonstrating the method's ability to scale by an order of magnitude.
On the Importance of Stereo for Accurate Depth Estimation: An Efficient Semi-Supervised Deep Neural Network Approach
Apr 20, 2018
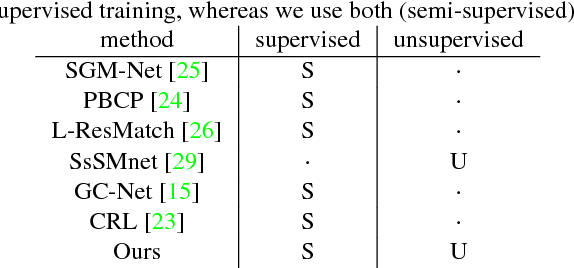
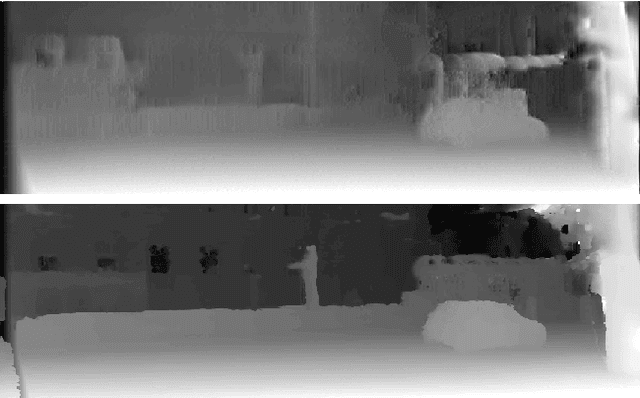
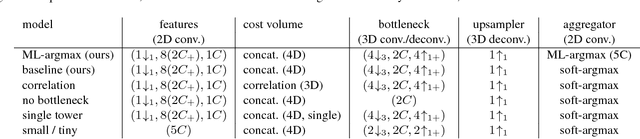
We revisit the problem of visual depth estimation in the context of autonomous vehicles. Despite the progress on monocular depth estimation in recent years, we show that the gap between monocular and stereo depth accuracy remains large$-$a particularly relevant result due to the prevalent reliance upon monocular cameras by vehicles that are expected to be self-driving. We argue that the challenges of removing this gap are significant, owing to fundamental limitations of monocular vision. As a result, we focus our efforts on depth estimation by stereo. We propose a novel semi-supervised learning approach to training a deep stereo neural network, along with a novel architecture containing a machine-learned argmax layer and a custom runtime (that will be shared publicly) that enables a smaller version of our stereo DNN to run on an embedded GPU. Competitive results are shown on the KITTI 2015 stereo dataset. We also evaluate the recent progress of stereo algorithms by measuring the impact upon accuracy of various design criteria.
Toward Low-Flying Autonomous MAV Trail Navigation using Deep Neural Networks for Environmental Awareness
Jul 22, 2017
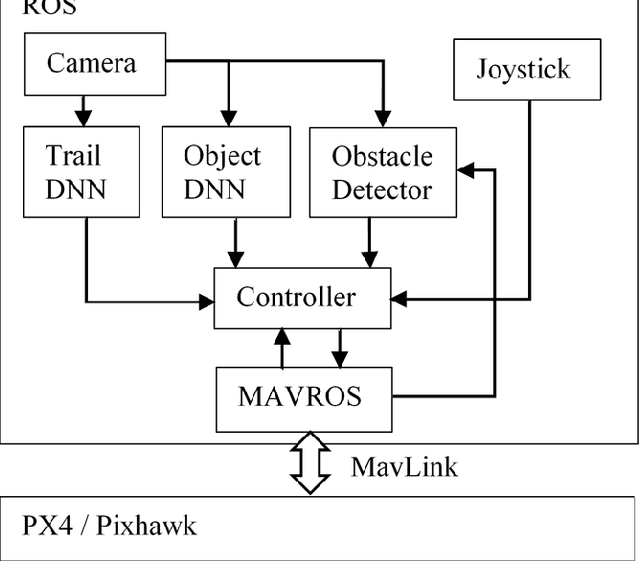

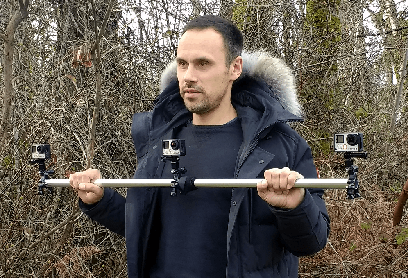
We present a micro aerial vehicle (MAV) system, built with inexpensive off-the-shelf hardware, for autonomously following trails in unstructured, outdoor environments such as forests. The system introduces a deep neural network (DNN) called TrailNet for estimating the view orientation and lateral offset of the MAV with respect to the trail center. The DNN-based controller achieves stable flight without oscillations by avoiding overconfident behavior through a loss function that includes both label smoothing and entropy reward. In addition to the TrailNet DNN, the system also utilizes vision modules for environmental awareness, including another DNN for object detection and a visual odometry component for estimating depth for the purpose of low-level obstacle detection. All vision systems run in real time on board the MAV via a Jetson TX1. We provide details on the hardware and software used, as well as implementation details. We present experiments showing the ability of our system to navigate forest trails more robustly than previous techniques, including autonomous flights of 1 km.