 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGhosts in the Point Clouds: De-glaring LiDAR in the Transient Domain
May 23, 2026Modern LiDARs are rapidly transitioning from bulky, mechanically scanned systems to ultra-compact, low-cost, solid-state arrays. This miniaturization-while enabling scalability, affordability, and camera-like data structures-introduces a new and severe failure mode: internal-multipath glare. When light from a bright or retroreflective surface reflects and scatters within the LiDAR, light that should reach a single pixel spreads across the pixel array. The resulting artifacts create phantom objects, obscure real ones, and produce safety-critical "ghosts in the point clouds." This paper introduces a physically grounded sensing model and algorithmic techniques for addressing this effect. We show that internal glare can be represented as a linear, scene-independent operator-the Transient Glare Spread Function (TGSF)-acting on the transient measurements. Building on this model, we develop a training-free approach that operates on low-level LiDAR detections (or echoes) prior to point-cloud formation, leveraging knowledge of the glare spread function to reason about the likelihood of each detection arising from glare. The resulting approach is compatible with existing LiDAR signal-processing pipelines, and deployable on unmodified commercial sensors. Using experiments with real single-photon LiDAR hardware, we demonstrate substantial suppression of severe glare artifacts while preserving true scene structure.
Hexagon-MLIR: An AI Compilation Stack For Qualcomm's Neural Processing Units (NPUs)
Feb 23, 2026In this paper, we present Hexagon-MLIR,an open-source compilation stack that targets Qualcomm Hexagon Neural Processing Unit (NPU) and provides unified support for lowering Triton kernels and PyTorch models . Built using the MLIR framework, our compiler applies a structured sequence of passes to exploit NPU architectural features to accelerate AI workloads. It enables faster deployment of new Triton kernels (hand-written or subgraphs from PyTorch 2.0), for our target by providing automated compilation from kernel to binary. By ingesting Triton kernels, we generate mega-kernels that maximize data locality in the NPU's Tightly Coupled Memory (TCM), reducing the bandwidth bottlenecks inherent in library-based approaches. This initiative complements our commercial toolchains by providing developers with an open-source MLIR-based compilation stack that gives them a path to advance AI compilation capabilities through a more flexible approach. Hexagon-MLIR is a work-in-progress, and we are continuing to add many more optimizations and capabilities in this effort.
gQIR: Generative Quanta Image Reconstruction
Feb 23, 2026Capturing high-quality images from only a few detected photons is a fundamental challenge in computational imaging. Single-photon avalanche diode (SPAD) sensors promise high-quality imaging in regimes where conventional cameras fail, but raw \emph{quanta frames} contain only sparse, noisy, binary photon detections. Recovering a coherent image from a burst of such frames requires handling alignment, denoising, and demosaicing (for color) under noise statistics far outside those assumed by standard restoration pipelines or modern generative models. We present an approach that adapts large text-to-image latent diffusion models to the photon-limited domain of quanta burst imaging. Our method leverages the structural and semantic priors of internet-scale diffusion models while introducing mechanisms to handle Bernoulli photon statistics. By integrating latent-space restoration with burst-level spatio-temporal reasoning, our approach produces reconstructions that are both photometrically faithful and perceptually pleasing, even under high-speed motion. We evaluate the method on synthetic benchmarks and new real-world datasets, including the first color SPAD burst dataset and a challenging \textit{Deforming (XD)} video benchmark. Across all settings, the approach substantially improves perceptual quality over classical and modern learning-based baselines, demonstrating the promise of adapting large generative priors to extreme photon-limited sensing. Code at \href{https://github.com/Aryan-Garg/gQIR}{https://github.com/Aryan-Garg/gQIR}.
Recovering Parametric Scenes from Very Few Time-of-Flight Pixels
Sep 19, 2025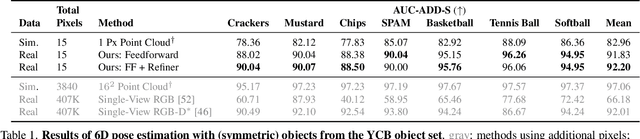
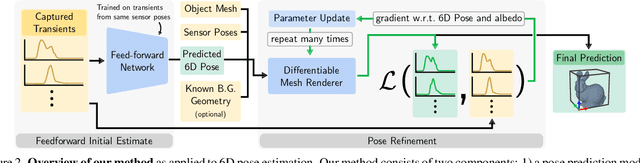
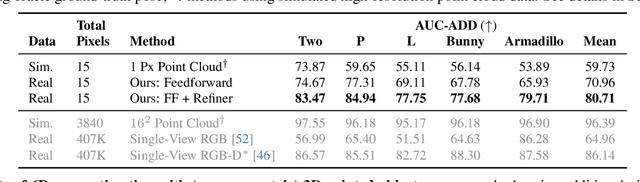
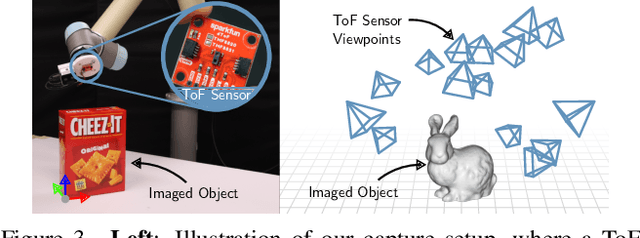
We aim to recover the geometry of 3D parametric scenes using very few depth measurements from low-cost, commercially available time-of-flight sensors. These sensors offer very low spatial resolution (i.e., a single pixel), but image a wide field-of-view per pixel and capture detailed time-of-flight data in the form of time-resolved photon counts. This time-of-flight data encodes rich scene information and thus enables recovery of simple scenes from sparse measurements. We investigate the feasibility of using a distributed set of few measurements (e.g., as few as 15 pixels) to recover the geometry of simple parametric scenes with a strong prior, such as estimating the 6D pose of a known object. To achieve this, we design a method that utilizes both feed-forward prediction to infer scene parameters, and differentiable rendering within an analysis-by-synthesis framework to refine the scene parameter estimate. We develop hardware prototypes and demonstrate that our method effectively recovers object pose given an untextured 3D model in both simulations and controlled real-world captures, and show promising initial results for other parametric scenes. We additionally conduct experiments to explore the limits and capabilities of our imaging solution.
Efficient Detection of Objects Near a Robot Manipulator via Miniature Time-of-Flight Sensors
Sep 19, 2025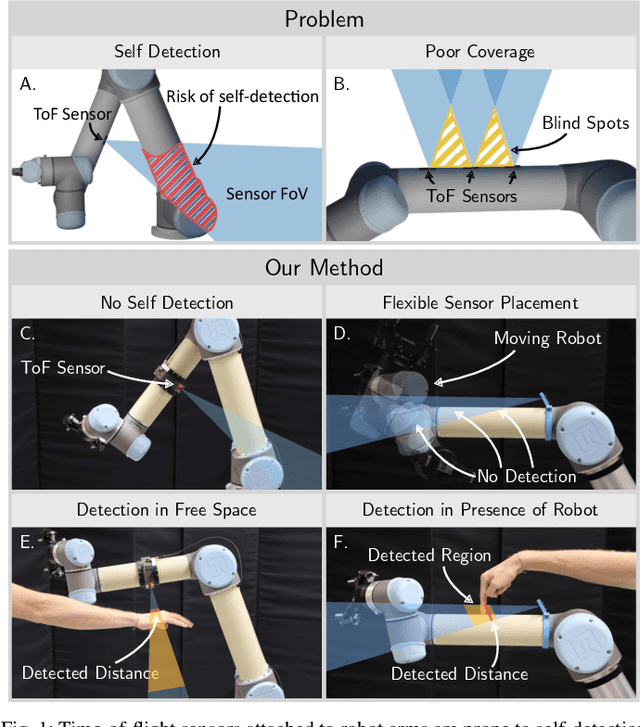
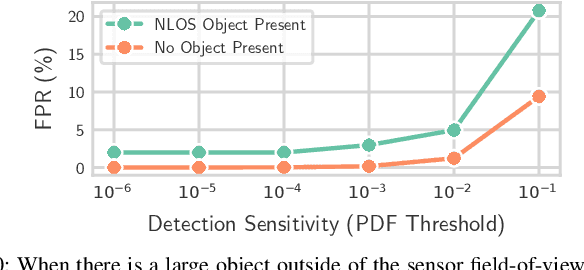
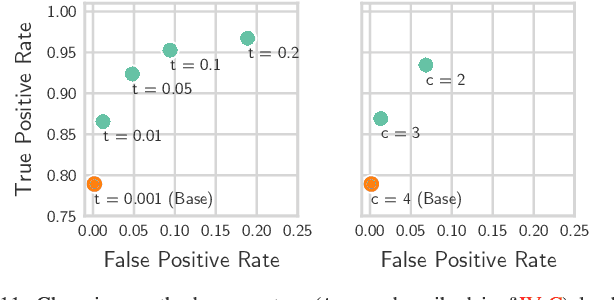
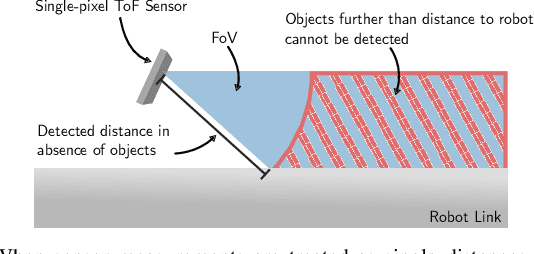
We provide a method for detecting and localizing objects near a robot arm using arm-mounted miniature time-of-flight sensors. A key challenge when using arm-mounted sensors is differentiating between the robot itself and external objects in sensor measurements. To address this challenge, we propose a computationally lightweight method which utilizes the raw time-of-flight information captured by many off-the-shelf, low-resolution time-of-flight sensor. We build an empirical model of expected sensor measurements in the presence of the robot alone, and use this model at runtime to detect objects in proximity to the robot. In addition to avoiding robot self-detections in common sensor configurations, the proposed method enables extra flexibility in sensor placement, unlocking configurations which achieve more efficient coverage of a radius around the robot arm. Our method can detect small objects near the arm and localize the position of objects along the length of a robot link to reasonable precision. We evaluate the performance of the method with respect to object type, location, and ambient light level, and identify limiting factors on performance inherent in the measurement principle. The proposed method has potential applications in collision avoidance and in facilitating safe human-robot interaction.
Agentic LLMs for Question Answering over Tabular Data
Sep 11, 2025
Question Answering over Tabular Data (Table QA) presents unique challenges due to the diverse structure, size, and data types of real-world tables. The SemEval 2025 Task 8 (DataBench) introduced a benchmark composed of large-scale, domain-diverse datasets to evaluate the ability of models to accurately answer structured queries. We propose a Natural Language to SQL (NL-to-SQL) approach leveraging large language models (LLMs) such as GPT-4o, GPT-4o-mini, and DeepSeek v2:16b to generate SQL queries dynamically. Our system follows a multi-stage pipeline involving example selection, SQL query generation, answer extraction, verification, and iterative refinement. Experiments demonstrate the effectiveness of our approach, achieving 70.5\% accuracy on DataBench QA and 71.6\% on DataBench Lite QA, significantly surpassing baseline scores of 26\% and 27\% respectively. This paper details our methodology, experimental results, and alternative approaches, providing insights into the strengths and limitations of LLM-driven Table QA.
Improving Narrative Classification and Explanation via Fine Tuned Language Models
Sep 04, 2025Understanding covert narratives and implicit messaging is essential for analyzing bias and sentiment. Traditional NLP methods struggle with detecting subtle phrasing and hidden agendas. This study tackles two key challenges: (1) multi-label classification of narratives and sub-narratives in news articles, and (2) generating concise, evidence-based explanations for dominant narratives. We fine-tune a BERT model with a recall-oriented approach for comprehensive narrative detection, refining predictions using a GPT-4o pipeline for consistency. For narrative explanation, we propose a ReACT (Reasoning + Acting) framework with semantic retrieval-based few-shot prompting, ensuring grounded and relevant justifications. To enhance factual accuracy and reduce hallucinations, we incorporate a structured taxonomy table as an auxiliary knowledge base. Our results show that integrating auxiliary knowledge in prompts improves classification accuracy and justification reliability, with applications in media analysis, education, and intelligence gathering.
Robust 3D Object Detection using Probabilistic Point Clouds from Single-Photon LiDARs
Jul 31, 2025LiDAR-based 3D sensors provide point clouds, a canonical 3D representation used in various scene understanding tasks. Modern LiDARs face key challenges in several real-world scenarios, such as long-distance or low-albedo objects, producing sparse or erroneous point clouds. These errors, which are rooted in the noisy raw LiDAR measurements, get propagated to downstream perception models, resulting in potentially severe loss of accuracy. This is because conventional 3D processing pipelines do not retain any uncertainty information from the raw measurements when constructing point clouds. We propose Probabilistic Point Clouds (PPC), a novel 3D scene representation where each point is augmented with a probability attribute that encapsulates the measurement uncertainty (or confidence) in the raw data. We further introduce inference approaches that leverage PPC for robust 3D object detection; these methods are versatile and can be used as computationally lightweight drop-in modules in 3D inference pipelines. We demonstrate, via both simulations and real captures, that PPC-based 3D inference methods outperform several baselines using LiDAR as well as camera-LiDAR fusion models, across challenging indoor and outdoor scenarios involving small, distant, and low-albedo objects, as well as strong ambient light. Our project webpage is at https://bhavyagoyal.github.io/ppc .
INSPIRE-GNN: Intelligent Sensor Placement to Improve Sparse Bicycling Network Prediction via Reinforcement Learning Boosted Graph Neural Networks
Jul 31, 2025Accurate link-level bicycling volume estimation is essential for sustainable urban transportation planning. However, many cities face significant challenges of high data sparsity due to limited bicycling count sensor coverage. To address this issue, we propose INSPIRE-GNN, a novel Reinforcement Learning (RL)-boosted hybrid Graph Neural Network (GNN) framework designed to optimize sensor placement and improve link-level bicycling volume estimation in data-sparse environments. INSPIRE-GNN integrates Graph Convolutional Networks (GCN) and Graph Attention Networks (GAT) with a Deep Q-Network (DQN)-based RL agent, enabling a data-driven strategic selection of sensor locations to maximize estimation performance. Applied to Melbourne's bicycling network, comprising 15,933 road segments with sensor coverage on only 141 road segments (99% sparsity) - INSPIRE-GNN demonstrates significant improvements in volume estimation by strategically selecting additional sensor locations in deployments of 50, 100, 200 and 500 sensors. Our framework outperforms traditional heuristic methods for sensor placement such as betweenness centrality, closeness centrality, observed bicycling activity and random placement, across key metrics such as Mean Squared Error (MSE), Root Mean Squared Error (RMSE) and Mean Absolute Error (MAE). Furthermore, our experiments benchmark INSPIRE-GNN against standard machine learning and deep learning models in the bicycle volume estimation performance, underscoring its effectiveness. Our proposed framework provides transport planners actionable insights to effectively expand sensor networks, optimize sensor placement and maximize volume estimation accuracy and reliability of bicycling data for informed transportation planning decisions.
Med-CoDE: Medical Critique based Disagreement Evaluation Framework
Apr 21, 2025The emergence of large language models (LLMs) has significantly influenced numerous fields, including healthcare, by enhancing the capabilities of automated systems to process and generate human-like text. However, despite their advancements, the reliability and accuracy of LLMs in medical contexts remain critical concerns. Current evaluation methods often lack robustness and fail to provide a comprehensive assessment of LLM performance, leading to potential risks in clinical settings. In this work, we propose Med-CoDE, a specifically designed evaluation framework for medical LLMs to address these challenges. The framework leverages a critique-based approach to quantitatively measure the degree of disagreement between model-generated responses and established medical ground truths. This framework captures both accuracy and reliability in medical settings. The proposed evaluation framework aims to fill the existing gap in LLM assessment by offering a systematic method to evaluate the quality and trustworthiness of medical LLMs. Through extensive experiments and case studies, we illustrate the practicality of our framework in providing a comprehensive and reliable evaluation of medical LLMs.