 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Energy and Spectral Efficiency in IoT-Cellular Networks via Active SIM-Equipped LEO Satellites
Aug 23, 2025



This paper investigates a low Earth orbit (LEO) satellite communication system enhanced by an active stacked intelligent metasurface (ASIM), mounted on the backplate of the satellite solar panels to efficiently utilize limited onboard space and reduce the main satellite power amplifier requirements. The system serves multiple ground users via rate-splitting multiple access (RSMA) and IoT devices through a symbiotic radio network. Multi-layer sequential processing in the ASIM improves effective channel gains and suppresses inter-user interference, outperforming active RIS and beyond-diagonal RIS designs. Three optimization approaches are evaluated: block coordinate descent with successive convex approximation (BCD-SCA), model-assisted multi-agent constraint soft actor-critic (MA-CSAC), and multi-constraint proximal policy optimization (MCPPO). Simulation results show that BCD-SCA converges fast and stably in convex scenarios without learning, MCPPO achieves rapid initial convergence with moderate stability, and MA-CSAC attains the highest long-term spectral and energy efficiency in large-scale networks. Energy-spectral efficiency trade-offs are analyzed for different ASIM elements, satellite antennas, and transmit power. Overall, the study demonstrates that integrating multi-layer ASIM with suitable optimization algorithms offers a scalable, energy-efficient, and high-performance solution for next-generation LEO satellite communications.
Energy Efficient Design of Active STAR-RIS-Aided SWIPT Systems
Mar 23, 2024



In this paper, we consider the downlink transmission of a multi-antenna base station (BS) supported by an active simultaneously transmitting and reconfigurable intelligent surface (STAR-RIS) to serve single-antenna users via simultaneous wireless information and power transfer (SWIPT). In this context, we formulate an energy efficiency maximisation problem that jointly optimises the gain, element selection and phase shift matrices of the active STAR-RIS, the transmit beamforming of the BS and the power splitting ratio of the users. With respect to the highly coupled and non-convex form of this problem, an alternating optimisation solution approach is proposed, using tools from convex optimisation and reinforcement learning. Specifically, semi-definite relaxation (SDR), difference of concave functions (DC), and fractional programming techniques are employed to transform the non-convex optimisation problem into a convex form for optimising the BS beamforming vector and the power splitting ratio of the SWIPT. Then, by integrating meta-learning with the modified deep deterministic policy gradient (DDPG) and soft actor-critical (SAC) methods, a combinatorial reinforcement learning network is developed to optimise the element selection, gain and phase shift matrices of the active STAR-RIS. Our simulations show the effectiveness of the proposed resource allocation scheme. Furthermore, our proposed active STAR-RIS-based SWIPT system outperforms its passive counterpart by 57% on average.
Meta Reinforcement Learning for Resource Allocation in Aerial Active-RIS-assisted Networks with Rate-Splitting Multiple Access
Mar 13, 2024



Mounting a reconfigurable intelligent surface (RIS) on an unmanned aerial vehicle (UAV) holds promise for improving traditional terrestrial network performance. Unlike conventional methods deploying passive RIS on UAVs, this study delves into the efficacy of an aerial active RIS (AARIS). Specifically, the downlink transmission of an AARIS network is investigated, where the base station (BS) leverages rate-splitting multiple access (RSMA) for effective interference management and benefits from the support of an AARIS for jointly amplifying and reflecting the BS's transmit signals. Considering both the non-trivial energy consumption of the active RIS and the limited energy storage of the UAV, we propose an innovative element selection strategy for optimizing the on/off status of RIS elements, which adaptively and remarkably manages the system's power consumption. To this end, a resource management problem is formulated, aiming to maximize the system energy efficiency (EE) by jointly optimizing the transmit beamforming at the BS, the element activation, the phase shift and the amplification factor at the RIS, the RSMA common data rate at users, as well as the UAV's trajectory. Due to the dynamicity nature of UAV and user mobility, a deep reinforcement learning (DRL) algorithm is designed for resource allocation, utilizing meta-learning to adaptively handle fast time-varying system dynamics. Simulations indicate that incorporating an active RIS at the UAV leads to substantial EE gain, compared to passive RIS-aided UAV. We observe the superiority of the RSMA-based AARIS system in terms of EE, compared to existing approaches adopting non-orthogonal multiple access (NOMA).
SLIPT in Joint Dimming Multi-LED OWC Systems with Rate Splitting Multiple Access
Feb 28, 2024Optical wireless communication (OWC) systems with multiple light-emitting diodes (LEDs) have recently been explored to support energy-limited devices via simultaneous lightwave information and power transfer (SLIPT). The energy consumption, however, becomes considerable by increasing the number of incorporated LEDs. This paper proposes a joint dimming (JD) scheme that lowers the consumed power of a SLIPT-enabled OWC system by controlling the number of active LEDs. We further enhance the data rate of this system by utilizing rate splitting multiple access (RSMA). More specifically, we formulate a data rate maximization problem to optimize the beamforming design, LED selection and RSMA rate adaptation that guarantees the power budget of the OWC transmitter, as well as the quality-of-service (QoS) and an energy harvesting level for users. We propose a dynamic resource allocation solution based on proximal policy optimization (PPO) reinforcement learning. In simulations, the optimal dimming level is determined to initiate a trade-off between the data rate and power consumption. It is also verified that RSMA significantly improves the data rate.
Multi-Objective Optimization in STAR-RIS-Aided SWIPT with RSMA via Meta-Learning
Jan 15, 2024



Simultaneously transmitting and reflecting reconfigurable intelligent surface (STAR-RIS) is a cutting-edge concept for the sixth-generation (6G) wireless networks. In this letter, we propose a novel system that incorporates STAR-RIS with simultaneous wireless information and power transfer (SWIPT) using rate splitting multiple access (RSMA). The proposed system facilitates communication from a multi-antenna base station (BS) to single-antenna users in a downlink transmission. The BS concurrently sends energy and information signals to multiple energy harvesting receivers (EHRs) and information data receivers (IDRs) with the support of a deployed STAR-RIS. Furthermore, a multi-objective optimization is introduced to strike a balance between users' sum rate and the total harvested energy. To achieve this, an optimization problem is formulated to optimize the energy/information beamforming vectors at the BS, the phase shifts at the STAR-RIS, and the common message rate. Subsequently, we employ a meta deep deterministic policy gradient (Meta-DDPG) approach to solve the complex problem. Simulation results validate that the proposed algorithm significantly enhances both data rate and harvested energy in comparison to conventional DDPG.
Resource Allocation in Uplink Multi STAR-RIS-aided NOMA System via Meta-Learning
Jan 13, 2024



Simultaneously transmitting and reflecting reconfigurable intelligent surface (STAR-RIS) is a novel technology which enables the full-space coverage by splitting the incident signal into reflected and transmitted signals. In this letter, a multi STAR-RIS-aided system using non-orthogonal multiple access (NOMA) in an uplink transmission is considered, where the multi-order reflections among multiple STAR-RISs assist the transmission from the single-antenna users to the multi-antenna base station (BS). Specifically, the total sum rate maximization problem is solved by jointly optimizing the active beamforming, power allocation, transmission and reflection beamforming at the STAR-RIS, and user-STAR-RIS association indicator. To solve the non-convex optimization problem, a novel deep reinforcement learning algorithm is proposed which is the combination of meta-learning and deep deterministic policy gradient (DDPG), namely Meta-DDPG. Numerical results demonstrate that the proposed Meta-DDPG algorithm outperforms the conventional DDPG algorithm.
Xavier-Enabled Extreme Reservoir Machine for Millimeter-Wave Beamspace Channel Tracking
Jun 01, 2022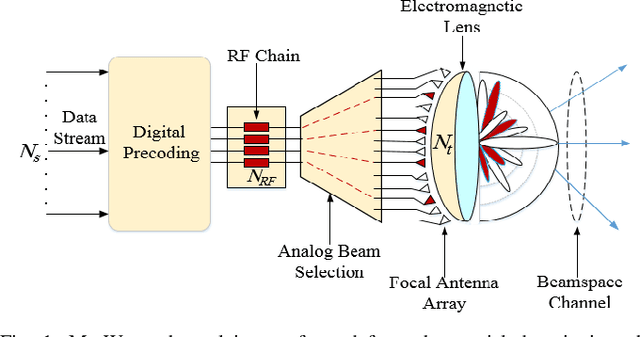
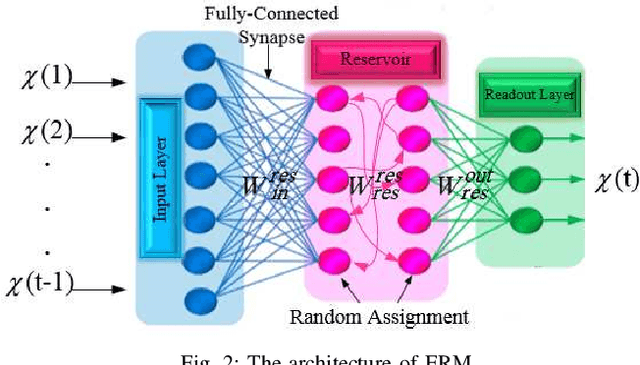
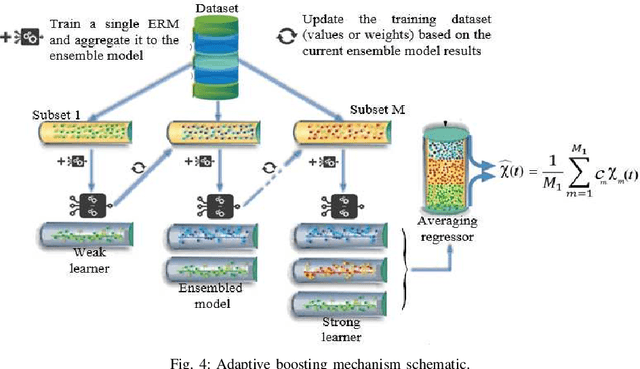
In this paper, we propose an accurate two-phase millimeter-Wave (mmWave) beamspace channel tracking mechanism. Particularly in the first phase, we train an extreme reservoir machine (ERM) for tracking the historical features of the mmWave beamspace channel and predicting them in upcoming time steps. Towards a more accurate prediction, we further fine-tune the ERM by means of Xavier initializer technique, whereby the input weights in ERM are initially derived from a zero mean and finite variance Gaussian distribution, leading to 49% degradation in prediction variance of the conventional ERM. The proposed method numerically improves the achievable spectral efficiency (SE) of the existing counterparts, by 13%, when signal-to-noise-ratio (SNR) is 15dB. We further investigate an ensemble learning technique in the second phase by sequentially incorporating multiple ERMs to form an ensembled model, namely adaptive boosting (AdaBoost), which further reduces the prediction variance in conventional ERM by 56%, and concludes in 21% enhancement of achievable SE upon the existing schemes at SNR=15dB.
Multi Agent Reinforcement Learning Trajectory Design and Two-Stage Resource Management in CoMP UAV VLC Networks
Dec 03, 2021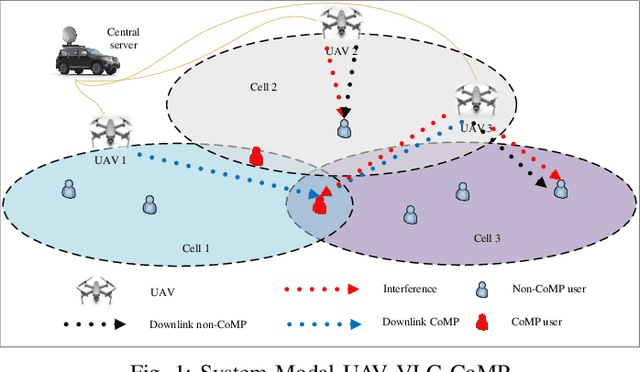
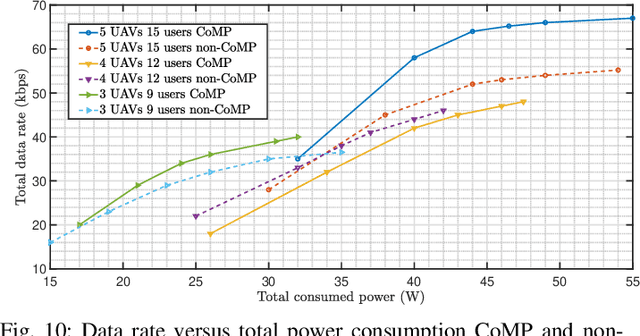
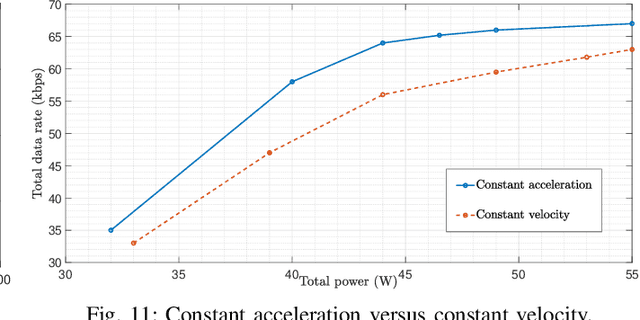
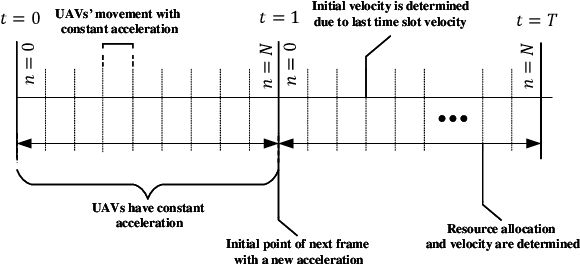
In this paper, we consider unmanned aerial vehicles (UAVs) equipped with a visible light communication (VLC) access point and coordinated multipoint (CoMP) capability that allows users to connect to more than one UAV. UAVs can move in 3-dimensional (3D) at a constant acceleration, where a central server is responsible for synchronization and cooperation among UAVs. The effect of accelerated motion in UAV is necessary to be considered. Unlike most existing works, we examine the effects of variable speed on kinetics and radio resource allocations. For the proposed system model, we define two different time frames. In the frame, the acceleration of each UAV is specified, and in each slot, radio resources are allocated. Our goal is to formulate a multiobjective optimization problem where the total data rate is maximized, and the total communication power consumption is minimized simultaneously. To handle this multiobjective optimization, we first apply the scalarization method and then apply multi-agent deep deterministic policy gradient (MADDPG). We improve this solution method by adding two critic networks together with two-stage resources allocation. Simulation results indicate that the constant acceleration motion of UAVs shows about 8\% better results than conventional motion systems in terms of performance.
Swish-Driven GoogleNet for Intelligent Analog Beam Selection in Terahertz Beamspace MIMO
Oct 12, 2021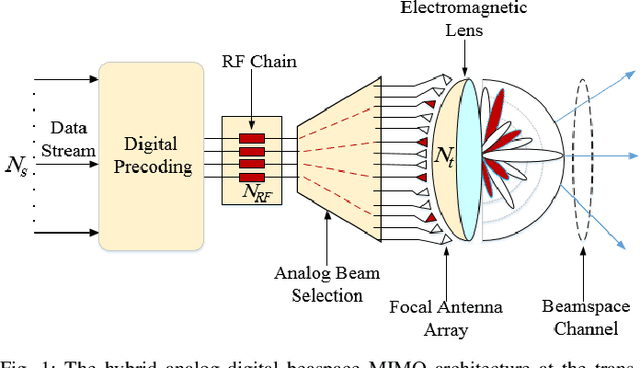
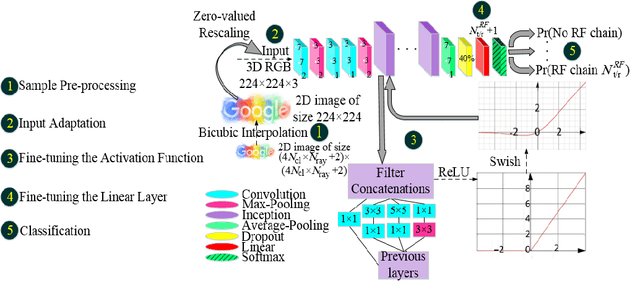
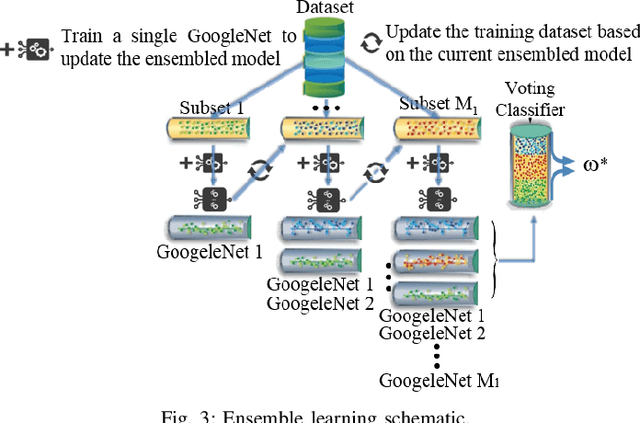
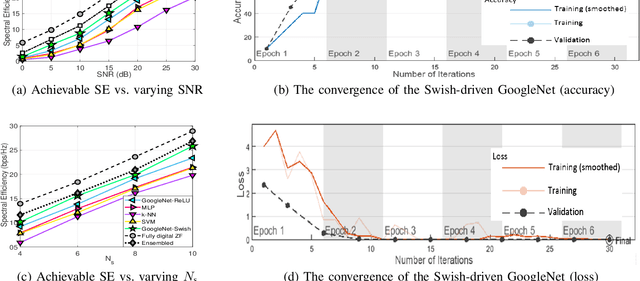
In this paper, we propose an intelligent analog beam selection strategy in a terahertz (THz) band beamspace multiple-input multiple-output (MIMO) system. First inspired by transfer learning, we fine-tune the pre-trained off-the-shelf GoogleNet classifier, to learn analog beam selection as a multi-class mapping problem. Simulation results show 83% accuracy for the analog beam selection, which subsequently results in 12% spectral efficiency (SE) gain, upon the existing counterparts. Towards a more accurate classifier, we replace the conventional rectified linear unit (ReLU) activation function of the GoogleNet with the recently proposed Swish and retrain the fine-tuned GoogleNet to learn analog beam selection. It is numerically indicated that the fine-tuned Swish-driven GoogleNet achieves 86% accuracy, as well as 18% improvement in achievable SE, upon the similar schemes. Eventually, a strong ensembled classifier is developed to learn analog beam selection by sequentially training multiple fine-tuned Swish-driven GoogleNet classifiers. According to the simulations, the strong ensembled model is 90% accurate and yields 27% gain in achievable SE, in comparison with prior methods.
Max-Min Fair Energy-Efficient Beamforming Design for Intelligent Reflecting Surface-Aided SWIPT Systems with Non-linear Energy Harvesting Model
Mar 22, 2021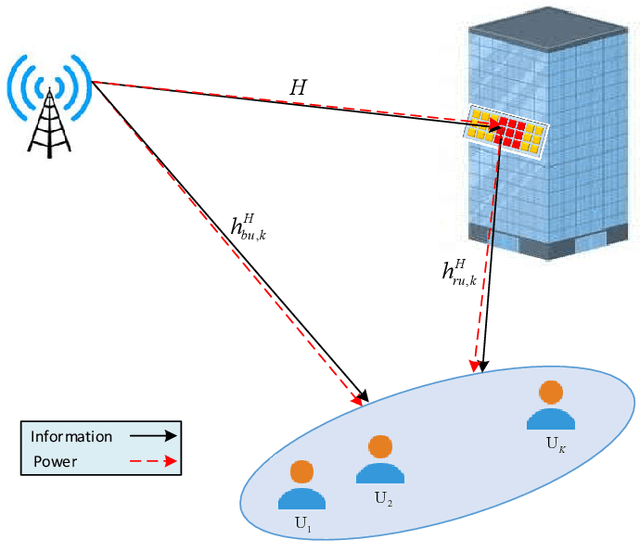
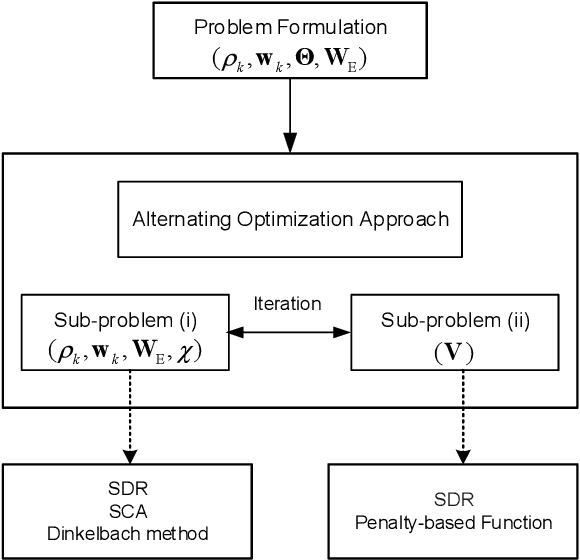
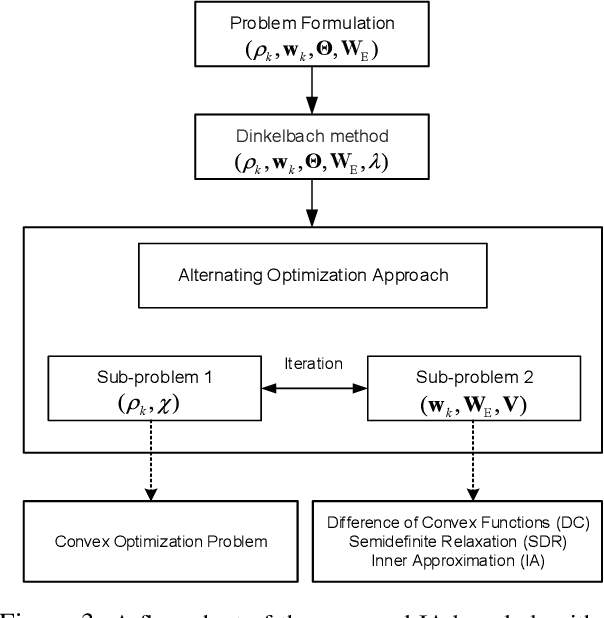
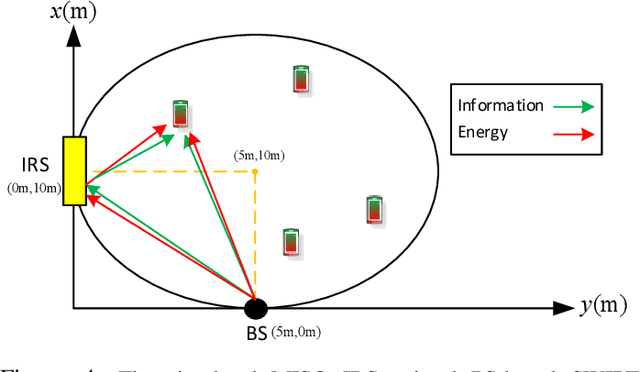
This paper considers an intelligent reflecting sur-face (IRS)-aided simultaneous wireless information and power transfer (SWIPT) network, where multiple users decode data and harvest energy from the transmitted signal of a transmit-ter. The proposed design framework exploits the cost-effective IRS to establish favorable communication environment to improve the fair energy efficient. In particular, we study the max-min energy efficiency (EE) of the system by jointly designing the transmit information and energy beamforming at the base station (BS), phase shifts at the IRS, as well as the power splitting (PS) ratio at all users subject to the minimum rate, minimum harvested energy, and transmit power constraints. The formulated problem is non-convex and thus challenging to be solved. We propose two algorithms namely penalty-based and inner approximation (IA)-based to handle the non-convexity of the optimization problem. As such, we divide the original problem into two sub-problems and apply the alternating optimization (AO) algorithm for both proposed algorithms to handle it iteratively. In particular, in the penalty-based algorithm for the first sub-problem, the semi-definite relaxation (SDR) technique, difference of convex functions (DC) programming, majorization-minimization (MM) approach, and fractional programming theory are exploited to transform the non-convex optimization problem into a convex form that can be addressed efficiently. For the second sub-problem, a penalty-based approach is proposed to handle the optimization on the phase shifts introduced by the IRS with the proposed algorithms. For the IA-based method, we optimize jointly beamforming vectors and phase shifts while the PS ratio is solved optimally in the first sub-problem...