 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
Sep 20, 2023Accurate deformable object manipulation (DOM) is essential for achieving autonomy in robotic surgery, where soft tissues are being displaced, stretched, and dissected. Many DOM methods can be powered by simulation, which ensures realistic deformation by adhering to the governing physical constraints and allowing for model prediction and control. However, real soft objects in robotic surgery, such as membranes and soft tissues, have complex, anisotropic physical parameters that a simulation with simple initialization from cameras may not fully capture. To use the simulation techniques in real surgical tasks, the "real-to-sim" gap needs to be properly compensated. In this work, we propose an online, adaptive parameter tuning approach for simulation optimization that (1) bridges the real-to-sim gap between a physics simulation and observations obtained 3D perceptions through estimating a residual mapping and (2) optimizes its stiffness parameters online. Our method ensures a small residual gap between the simulation and observation and improves the simulation's predictive capabilities. The effectiveness of the proposed mechanism is evaluated in the manipulation of both a thin-shell and volumetric tissue, representative of most tissue scenarios. This work contributes to the advancement of simulation-based deformable tissue manipulation and holds potential for improving surgical autonomy.
BAA-NGP: Bundle-Adjusting Accelerated Neural Graphics Primitives
Jun 09, 2023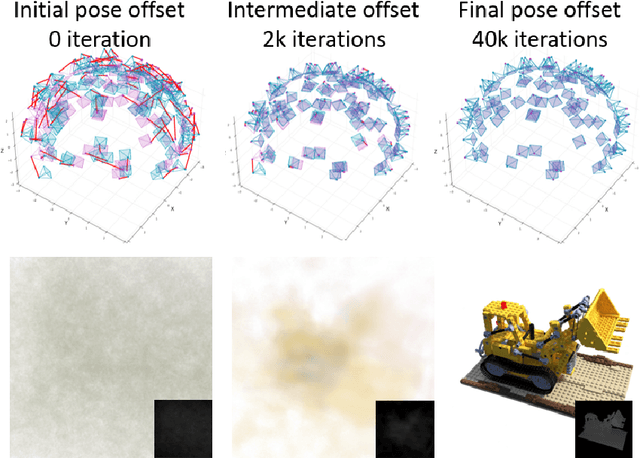
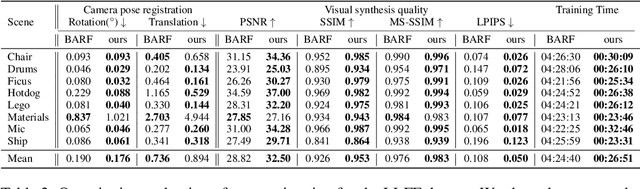
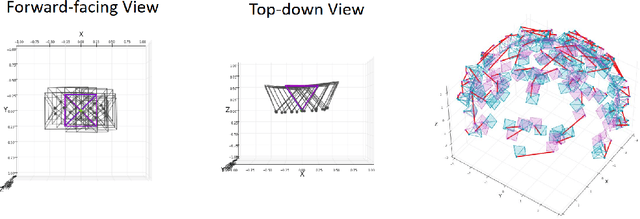
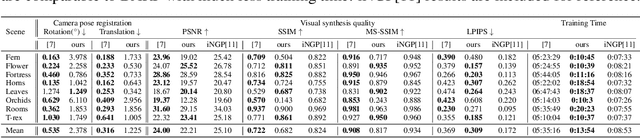
Implicit neural representation has emerged as a powerful method for reconstructing 3D scenes from 2D images. Given a set of camera poses and associated images, the models can be trained to synthesize novel, unseen views. In order to expand the use cases for implicit neural representations, we need to incorporate camera pose estimation capabilities as part of the representation learning, as this is necessary for reconstructing scenes from real-world video sequences where cameras are generally not being tracked. Existing approaches like COLMAP and, most recently, bundle-adjusting neural radiance field methods often suffer from lengthy processing times. These delays ranging from hours to days, arise from laborious feature matching, hardware limitations, dense point sampling, and long training times required by a multi-layer perceptron structure with a large number of parameters. To address these challenges, we propose a framework called bundle-adjusting accelerated neural graphics primitives (BAA-NGP). Our approach leverages accelerated sampling and hash encoding to expedite both pose refinement/estimation and 3D scene reconstruction. Experimental results demonstrate that our method achieves a more than 10 to 20 $\times$ speed improvement in novel view synthesis compared to other bundle-adjusting neural radiance field methods without sacrificing the quality of pose estimation.
Learning Sampling Dictionaries for Efficient and Generalizable Robot Motion Planning with Transformers
Jun 01, 2023Motion planning is integral to robotics applications such as autonomous driving, surgical robots, and industrial manipulators. Existing planning methods lack scalability to higher-dimensional spaces, while recent learning based planners have shown promise in accelerating sampling-based motion planners (SMP) but lack generalizability to out-of-distribution environments. To address this, we present a novel approach, Vector Quantized-Motion Planning Transformers (VQ-MPT) that overcomes the key generalization and scaling drawbacks of previous learning-based methods. VQ-MPT consists of two stages. Stage 1 is a Vector Quantized-Variational AutoEncoder model that learns to represent the planning space using a finite number of sampling distributions, and stage 2 is an Auto-Regressive model that constructs a sampling region for SMPs by selecting from the learned sampling distribution sets. By splitting large planning spaces into discrete sets and selectively choosing the sampling regions, our planner pairs well with out-of-the-box SMPs, generating near-optimal paths faster than without VQ-MPT's aid. It is generalizable in that it can be applied to systems of varying complexities, from 2D planar to 14D bi-manual robots with diverse environment representations, including costmaps and point clouds. Trained VQ-MPT models generalize to environments unseen during training and achieve higher success rates than previous methods.
ORRN: An ODE-based Recursive Registration Network for Deformable Respiratory Motion Estimation with Lung 4DCT Images
May 25, 2023Deformable Image Registration (DIR) plays a significant role in quantifying deformation in medical data. Recent Deep Learning methods have shown promising accuracy and speedup for registering a pair of medical images. However, in 4D (3D + time) medical data, organ motion, such as respiratory motion and heart beating, can not be effectively modeled by pair-wise methods as they were optimized for image pairs but did not consider the organ motion patterns necessary when considering 4D data. This paper presents ORRN, an Ordinary Differential Equations (ODE)-based recursive image registration network. Our network learns to estimate time-varying voxel velocities for an ODE that models deformation in 4D image data. It adopts a recursive registration strategy to progressively estimate a deformation field through ODE integration of voxel velocities. We evaluate the proposed method on two publicly available lung 4DCT datasets, DIRLab and CREATIS, for two tasks: 1) registering all images to the extreme inhale image for 3D+t deformation tracking and 2) registering extreme exhale to inhale phase images. Our method outperforms other learning-based methods in both tasks, producing the smallest Target Registration Error of 1.24mm and 1.26mm, respectively. Additionally, it produces less than 0.001\% unrealistic image folding, and the computation speed is less than 1 second for each CT volume. ORRN demonstrates promising registration accuracy, deformation plausibility, and computation efficiency on group-wise and pair-wise registration tasks. It has significant implications in enabling fast and accurate respiratory motion estimation for treatment planning in radiation therapy or robot motion planning in thoracic needle insertion.
Biomedical image analysis competitions: The state of current participation practice
Dec 16, 2022The number of international benchmarking competitions is steadily increasing in various fields of machine learning (ML) research and practice. So far, however, little is known about the common practice as well as bottlenecks faced by the community in tackling the research questions posed. To shed light on the status quo of algorithm development in the specific field of biomedical imaging analysis, we designed an international survey that was issued to all participants of challenges conducted in conjunction with the IEEE ISBI 2021 and MICCAI 2021 conferences (80 competitions in total). The survey covered participants' expertise and working environments, their chosen strategies, as well as algorithm characteristics. A median of 72% challenge participants took part in the survey. According to our results, knowledge exchange was the primary incentive (70%) for participation, while the reception of prize money played only a minor role (16%). While a median of 80 working hours was spent on method development, a large portion of participants stated that they did not have enough time for method development (32%). 25% perceived the infrastructure to be a bottleneck. Overall, 94% of all solutions were deep learning-based. Of these, 84% were based on standard architectures. 43% of the respondents reported that the data samples (e.g., images) were too large to be processed at once. This was most commonly addressed by patch-based training (69%), downsampling (37%), and solving 3D analysis tasks as a series of 2D tasks. K-fold cross-validation on the training set was performed by only 37% of the participants and only 50% of the participants performed ensembling based on multiple identical models (61%) or heterogeneous models (39%). 48% of the respondents applied postprocessing steps.
Suture Thread Spline Reconstruction from Endoscopic Images for Robotic Surgery with Reliability-driven Keypoint Detection
Sep 27, 2022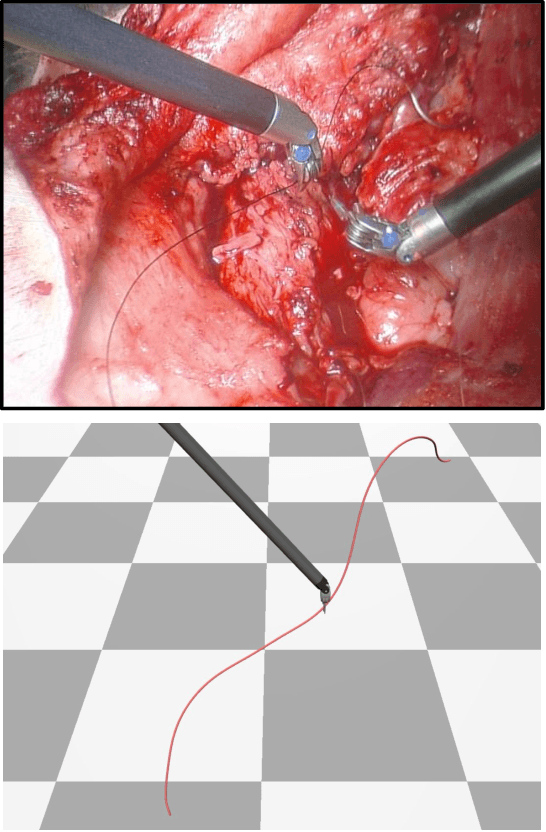
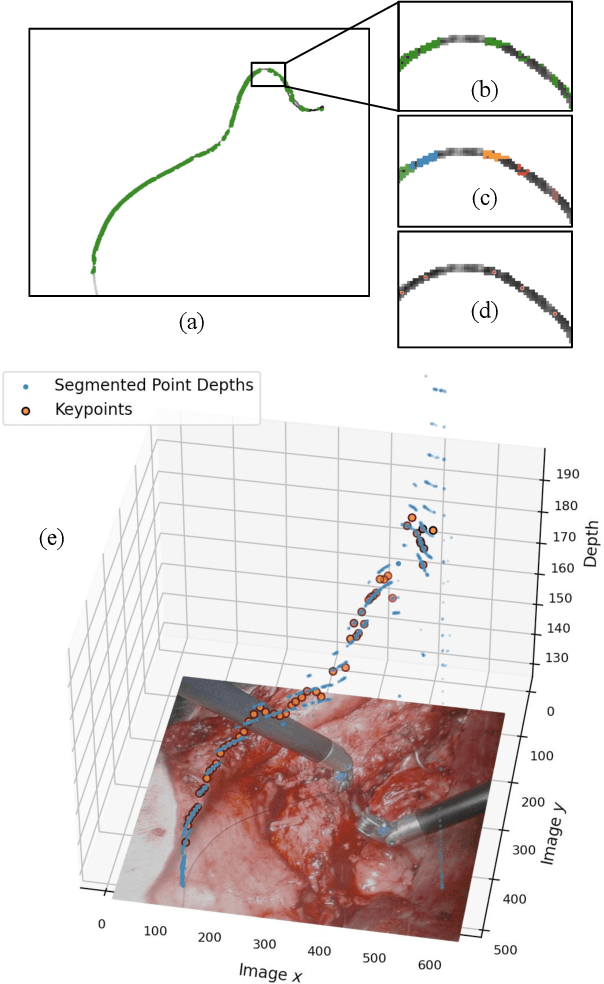
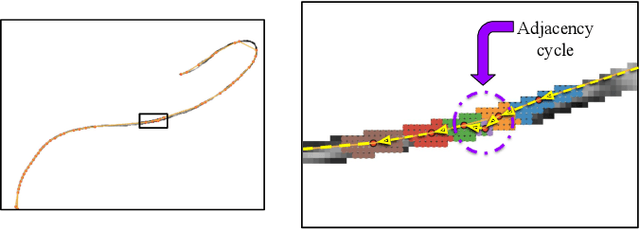
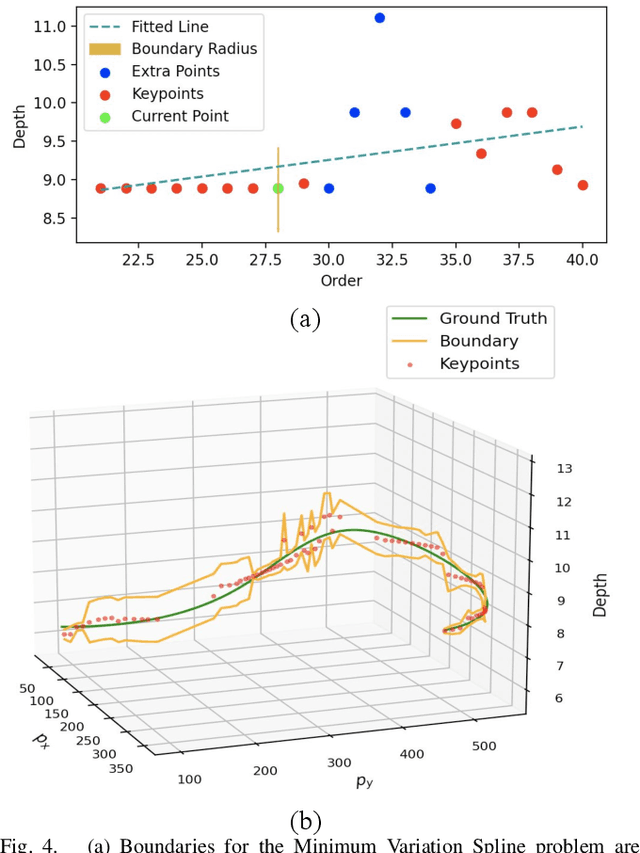
Automating the process of manipulating and delivering sutures during robotic surgery is a prominent problem at the frontier of surgical robotics, as automating this task can significantly reduce surgeons' fatigue during tele-operated surgery and allow them to spend more time addressing higher-level clinical decision making. Accomplishing autonomous suturing and suture manipulation in the real world requires accurate suture thread localization and reconstruction, the process of creating a 3D shape representation of suture thread from 2D stereo camera surgical image pairs. This is a very challenging problem due to how limited pixel information is available for the threads, as well as their sensitivity to lighting and specular reflection. We present a suture thread reconstruction work that uses reliable keypoints and a Minimum Variation Spline (MVS) smoothing optimization to construct a 3D centerline from a segmented surgical image pair. This method is comparable to previous suture thread reconstruction works, with the possible benefit of increased accuracy of grasping point estimation. Our code and datasets will be available at: https://github.com/ucsdarclab/thread-reconstruction.
Configuration Space Decomposition for Scalable Proxy Collision Checking in Robot Planning and Control
Jan 26, 2022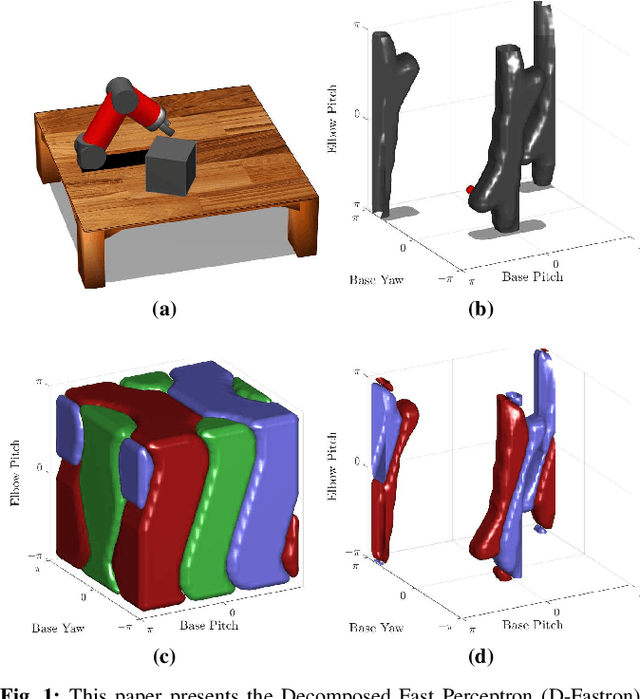
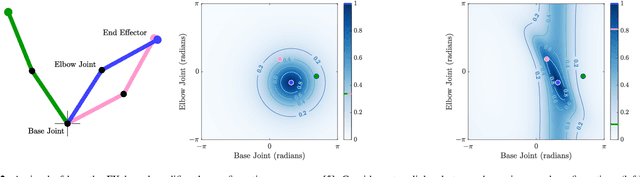
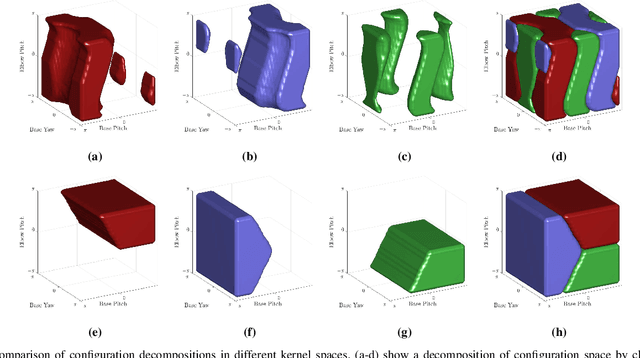
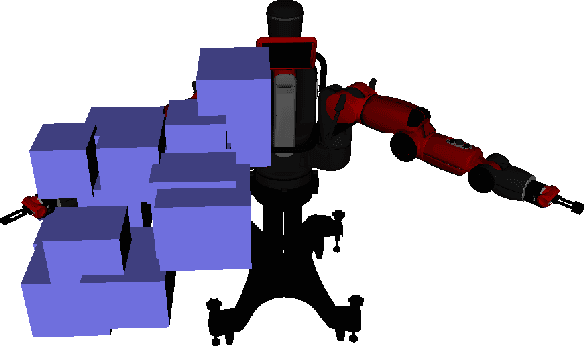
Real-time robot motion planning in complex high-dimensional environments remains an open problem. Motion planning algorithms, and their underlying collision checkers, are crucial to any robot control stack. Collision checking takes up a large portion of the computational time in robot motion planning. Existing collision checkers make trade-offs between speed and accuracy and scale poorly to high-dimensional, complex environments. We present a novel space decomposition method using K-Means clustering in the Forward Kinematics space to accelerate proxy collision checking. We train individual configuration space models using Fastron, a kernel perceptron algorithm, on these decomposed subspaces, yielding compact yet highly accurate models that can be queried rapidly and scale better to more complex environments. We demonstrate this new method, called Decomposed Fast Perceptron (D-Fastron), on the 7-DOF Baxter robot producing on average 29x faster collision checks and up to 9.8x faster motion planning compared to state-of-the-art geometric collision checkers.
DiffCo: Auto-Differentiable Proxy Collision Detection with Multi-class Labels for Safety-Aware Trajectory Optimization
Feb 15, 2021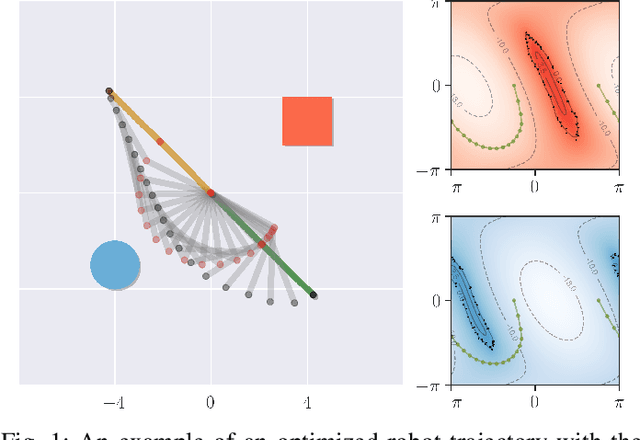
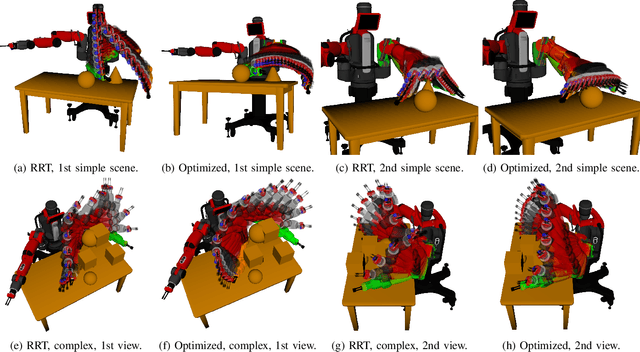
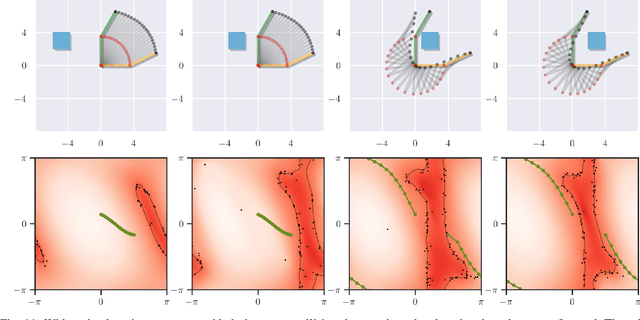
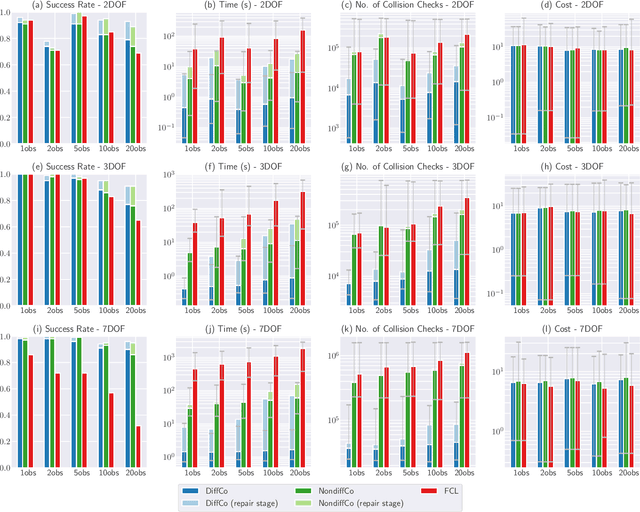
The objective of trajectory optimization algorithms is to achieve an optimal collision-free path between a start and goal state. In real-world scenarios where environments can be complex and non-homogeneous, a robot needs to be able to gauge whether a state will be in collision with various objects in order to meet some safety metrics. The collision detector should be computationally efficient and, ideally, analytically differentiable to facilitate stable and rapid gradient descent during optimization. However, methods today lack an elegant approach to detect collision differentiably, relying rather on numerical gradients that can be unstable. We present DiffCo, the first, fully auto-differentiable, non-parametric model for collision detection. Its non-parametric behavior allows one to compute collision boundaries on-the-fly and update them, requiring no pre-training and allowing it to update continuously in dynamic environments. It provides robust gradients for trajectory optimization via backpropagation and is often 10-100x faster to compute than its geometric counterparts. DiffCo also extends trivially to modeling different object collision classes for semantically informed trajectory optimization.
Robust Keypoint Detection and Pose Estimation of Robot Manipulators with Self-Occlusions via Sim-to-Real Transfer
Oct 15, 2020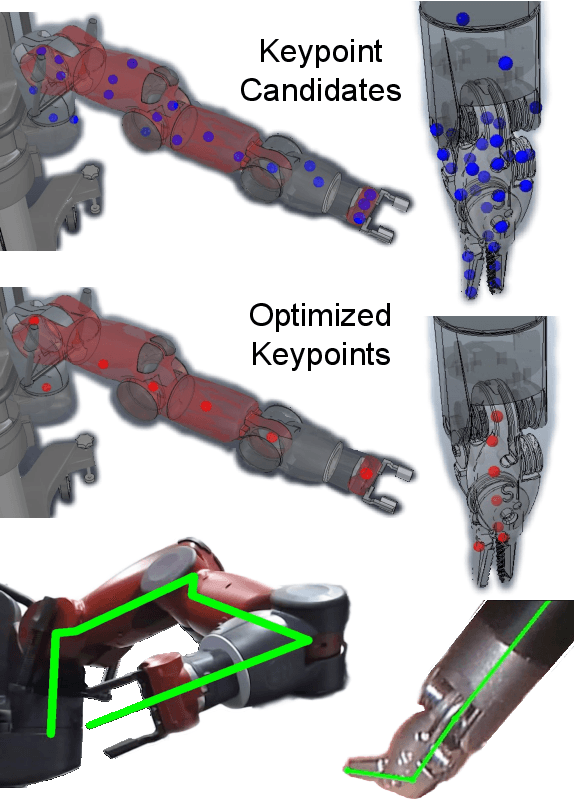
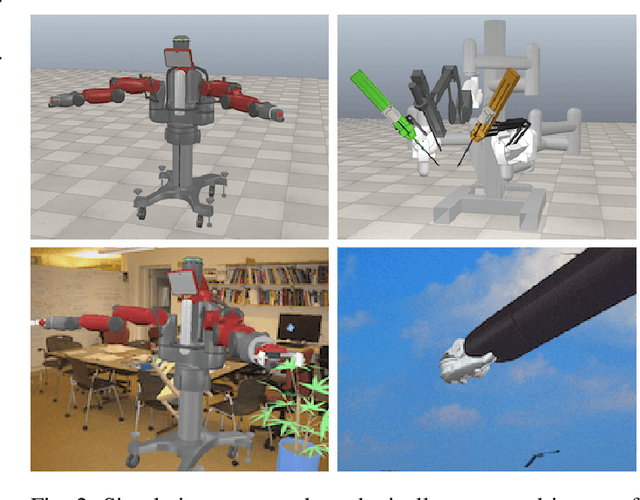
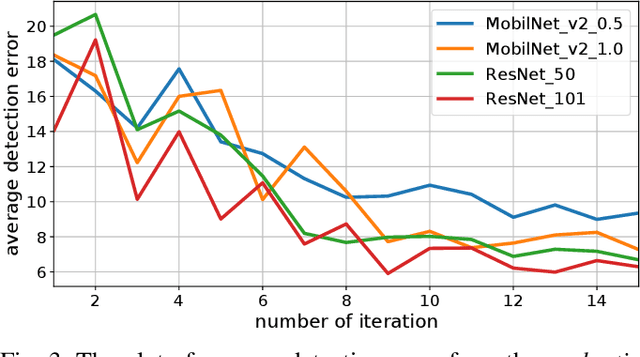
Keypoint detection is an essential building block for many robotic applications like motion capture and pose estimation. Historically, keypoints are detected using uniquely engineered markers such as checkerboards, fiducials, or markers. More recently, deep learning methods have been explored as they have the ability to detect user-defined keypoints in a marker-less manner. However, deep neural network (DNN) detectors can have an uneven performance for different manually selected keypoints along the kinematic chain. An example of this can be found on symmetric robotic tools where DNN detectors cannot solve the correspondence problem correctly. In this work, we propose a new and autonomous way to define the keypoint locations that overcomes these challenges. The approach involves finding the optimal set of keypoints on robotic manipulators for robust visual detection. Using a robotic simulator as a medium, our algorithm utilizes synthetic data for DNN training, and the proposed algorithm is used to optimize the selection of keypoints through an iterative approach. The results show that when using the optimized keypoints, the detection performance of the DNNs improved so significantly that they can even be detected in cases of self-occlusion. We further use the optimized keypoints for real robotic applications by using domain randomization to bridge the reality gap between the simulator and the physical world. The physical world experiments show how the proposed method can be applied to the wide-breadth of robotic applications that require visual feedback, such as camera-to-robot calibration, robotic tool tracking, and whole-arm pose estimation.
Autonomous Navigation in Unknown Environments with Sparse Bayesian Kernel-based Occupancy Mapping
Sep 15, 2020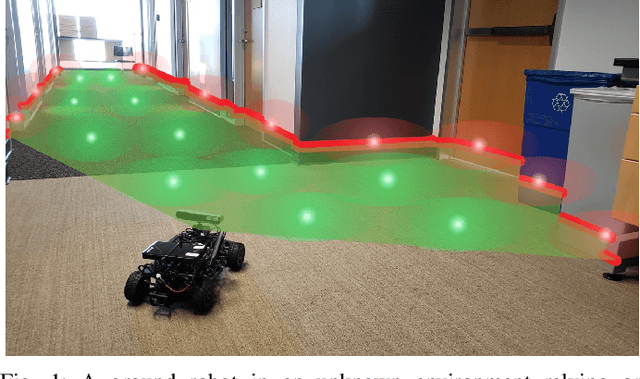
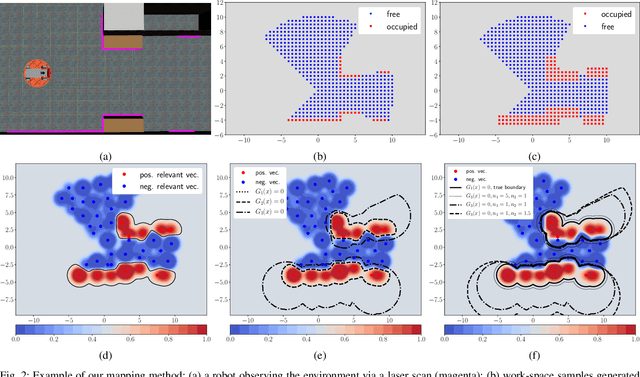
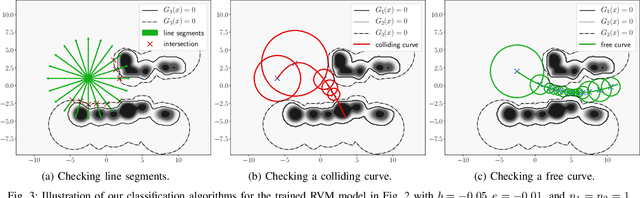

This paper focuses on online occupancy mapping and real-time collision checking onboard an autonomous robot navigating in a large unknown environment. Commonly used voxel and octree map representations can be easily maintained in a small environment but have increasing memory requirements as the environment grows. We propose a fundamentally different approach for occupancy mapping, in which the boundary between occupied and free space is viewed as the decision boundary of a machine learning classifier. This work generalizes a kernel perceptron model which maintains a very sparse set of support vectors to represent the environment boundaries efficiently. We develop a probabilistic formulation based on Relevance Vector Machines, allowing robustness to measurement noise and localization errors as well as probabilistic occupancy classification, supporting autonomous navigation. We provide an online training algorithm, updating the sparse Bayesian map incrementally from streaming range data, and an efficient collision-checking method for general curves, representing potential robot trajectories. The effectiveness of our mapping and collision checking algorithms is evaluated in tasks requiring autonomous robot navigation in unknown environments.