 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGentle Object Retraction in Dense Clutter Using Multimodal Force Sensing and Imitation Learning
Aug 26, 2025



Dense collections of movable objects are common in everyday spaces -- from cabinets in a home to shelves in a warehouse. Safely retracting objects from such collections is difficult for robots, yet people do it easily, using non-prehensile tactile sensing on the sides and backs of their hands and arms. We investigate the role of such sensing for training robots to gently reach into constrained clutter and extract objects. The available sensing modalities are (1) "eye-in-hand" vision, (2) proprioception, (3) non-prehensile triaxial tactile sensing, (4) contact wrenches estimated from joint torques, and (5) a measure of successful object acquisition obtained by monitoring the vacuum line of a suction cup. We use imitation learning to train policies from a set of demonstrations on randomly generated scenes, then conduct an ablation study of wrench and tactile information. We evaluate each policy's performance across 40 unseen environment configurations. Policies employing any force sensing show fewer excessive force failures, an increased overall success rate, and faster completion times. The best performance is achieved using both tactile and wrench information, producing an 80% improvement above the baseline without force information.
TypeTele: Releasing Dexterity in Teleoperation by Dexterous Manipulation Types
Jul 02, 2025



Dexterous teleoperation plays a crucial role in robotic manipulation for real-world data collection and remote robot control. Previous dexterous teleoperation mostly relies on hand retargeting to closely mimic human hand postures. However, these approaches may fail to fully leverage the inherent dexterity of dexterous hands, which can execute unique actions through their structural advantages compared to human hands. To address this limitation, we propose TypeTele, a type-guided dexterous teleoperation system, which enables dexterous hands to perform actions that are not constrained by human motion patterns. This is achieved by introducing dexterous manipulation types into the teleoperation system, allowing operators to employ appropriate types to complete specific tasks. To support this system, we build an extensible dexterous manipulation type library to cover comprehensive dexterous postures used in manipulation tasks. During teleoperation, we employ a MLLM (Multi-modality Large Language Model)-assisted type retrieval module to identify the most suitable manipulation type based on the specific task and operator commands. Extensive experiments of real-world teleoperation and imitation learning demonstrate that the incorporation of manipulation types significantly takes full advantage of the dexterous robot's ability to perform diverse and complex tasks with higher success rates.
DexForce: Extracting Force-informed Actions from Kinesthetic Demonstrations for Dexterous Manipulation
Jan 17, 2025



Imitation learning requires high-quality demonstrations consisting of sequences of state-action pairs. For contact-rich dexterous manipulation tasks that require fine-grained dexterity, the actions in these state-action pairs must produce the right forces. Current widely-used methods for collecting dexterous manipulation demonstrations are difficult to use for demonstrating contact-rich tasks due to unintuitive human-to-robot motion retargeting and the lack of direct haptic feedback. Motivated by this, we propose DexForce, a method for collecting demonstrations of contact-rich dexterous manipulation. DexForce leverages contact forces, measured during kinesthetic demonstrations, to compute force-informed actions for policy learning. We use DexForce to collect demonstrations for six tasks and show that policies trained on our force-informed actions achieve an average success rate of 76% across all tasks. In contrast, policies trained directly on actions that do not account for contact forces have near-zero success rates. We also conduct a study ablating the inclusion of force data in policy observations. We find that while using force data never hurts policy performance, it helps the most for tasks that require an advanced level of precision and coordination, like opening an AirPods case and unscrewing a nut.
Martian Exploration of Lava Tubes (MELT) with ReachBot: Scientific Investigation and Concept of Operations
Jun 19, 2024



As natural access points to the subsurface, lava tubes and other caves have become premier targets of planetary missions for astrobiological analyses. Few existing robotic paradigms, however, are able to explore such challenging environments. ReachBot is a robot that enables navigation in planetary caves by using extendable and retractable limbs to locomote. This paper outlines the potential science return and mission operations for a notional mission that deploys ReachBot to a martian lava tube. In this work, the motivating science goals and science traceability matrix are provided to guide payload selection. A Concept of Operations (ConOps) is also developed for ReachBot, providing a framework for deployment and activities on Mars, analyzing mission risks, and developing mitigation strategies
Grasp as You Say: Language-guided Dexterous Grasp Generation
May 29, 2024



This paper explores a novel task ""Dexterous Grasp as You Say"" (DexGYS), enabling robots to perform dexterous grasping based on human commands expressed in natural language. However, the development of this field is hindered by the lack of datasets with natural human guidance; thus, we propose a language-guided dexterous grasp dataset, named DexGYSNet, offering high-quality dexterous grasp annotations along with flexible and fine-grained human language guidance. Our dataset construction is cost-efficient, with the carefully-design hand-object interaction retargeting strategy, and the LLM-assisted language guidance annotation system. Equipped with this dataset, we introduce the DexGYSGrasp framework for generating dexterous grasps based on human language instructions, with the capability of producing grasps that are intent-aligned, high quality and diversity. To achieve this capability, our framework decomposes the complex learning process into two manageable progressive objectives and introduce two components to realize them. The first component learns the grasp distribution focusing on intention alignment and generation diversity. And the second component refines the grasp quality while maintaining intention consistency. Extensive experiments are conducted on DexGYSNet and real world environment for validation.
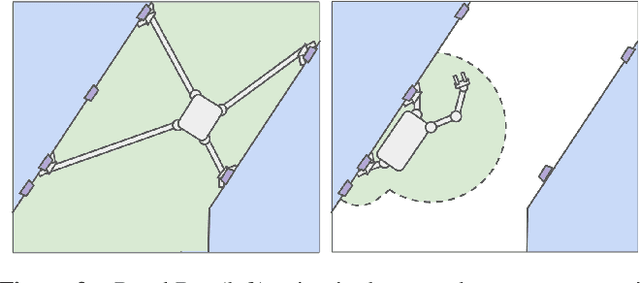
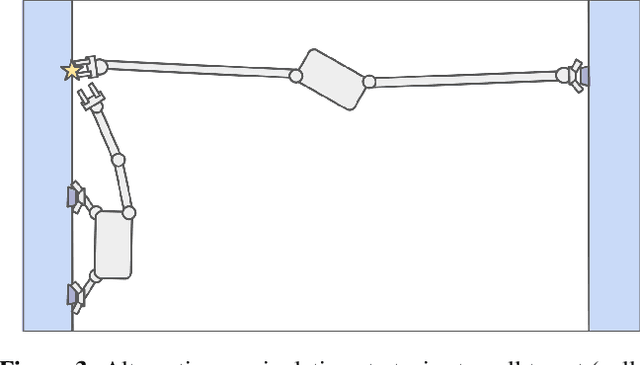
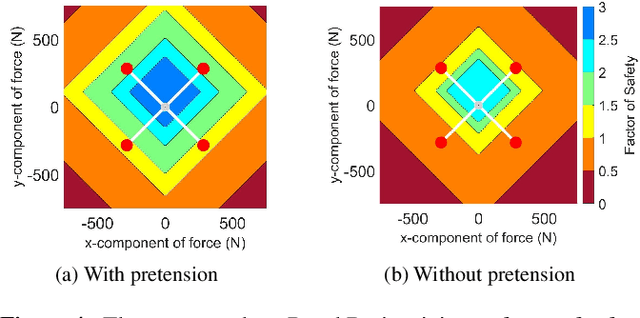
Task-Driven Manipulation with Reconfigurable Parallel Robots
Mar 16, 2024



ReachBot, a proposed robotic platform, employs extendable booms as limbs for mobility in challenging environments, such as martian caves. When attached to the environment, ReachBot acts as a parallel robot, with reconfiguration driven by the ability to detach and re-place the booms. This ability enables manipulation-focused scientific objectives: for instance, through operating tools, or handling and transporting samples. To achieve these capabilities, we develop a two-part solution, optimizing for robustness against task uncertainty and stochastic failure modes. First, we present a mixed-integer stance planner to determine the positioning of ReachBot's booms to maximize the task wrench space about the nominal point(s). Second, we present a convex tension planner to determine boom tensions for the desired task wrenches, accounting for the probabilistic nature of microspine grasping. We demonstrate improvements in key robustness metrics from the field of dexterous manipulation, and show a large increase in the volume of the manipulation workspace. Finally, we employ Monte-Carlo simulation to validate the robustness of these methods, demonstrating good performance across a range of randomized tasks and environments, and generalization to cable-driven morphologies. We make our code available at our project webpage, https://stanfordasl.github.io/reachbot_manipulation/
Tactile-Informed Action Primitives Mitigate Jamming in Dense Clutter
Feb 14, 2024



It is difficult for robots to retrieve objects in densely cluttered lateral access scenes with movable objects as jamming against adjacent objects and walls can inhibit progress. We propose the use of two action primitives -- burrowing and excavating -- that can fluidize the scene to un-jam obstacles and enable continued progress. Even when these primitives are implemented in an open loop manner at clock-driven intervals, we observe a decrease in the final distance to the target location. Furthermore, we combine the primitives into a closed loop hybrid control strategy using tactile and proprioceptive information to leverage the advantages of both primitives without being overly disruptive. In doing so, we achieve a 10-fold increase in success rate above the baseline control strategy and significantly improve completion times as compared to the primitives alone or a naive combination of them.
ReachBot: A Small Robot for Large Mobile Manipulation Tasks
Oct 20, 2021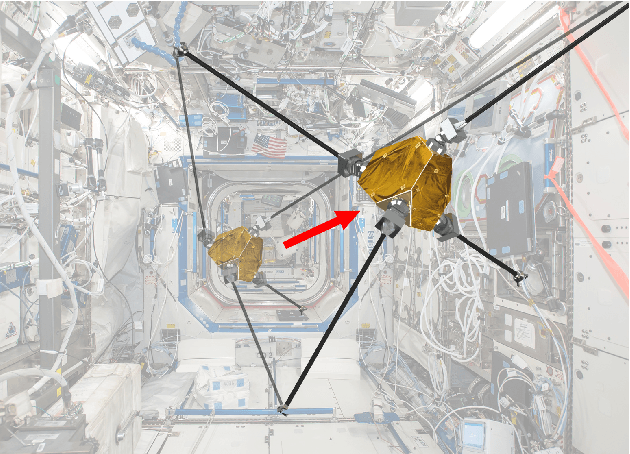
Robots are widely deployed in space environments because of their versatility and robustness. However, adverse gravity conditions and challenging terrain geometry expose the limitations of traditional robot designs, which are often forced to sacrifice one of mobility or manipulation capabilities to attain the other. Prospective climbing operations in these environments reveals a need for small, compact robots capable of versatile mobility and manipulation. We propose a novel robotic concept called ReachBot that fills this need by combining two existing technologies: extendable booms and mobile manipulation. ReachBot leverages the reach and tensile strength of extendable booms to achieve an outsized reachable workspace and wrench capability. Through their lightweight, compactable structure, these booms also reduce mass and complexity compared to traditional rigid-link articulated-arm designs. Using these advantages, ReachBot excels in mobile manipulation missions in low gravity or that require climbing, particularly when anchor points are sparse. After introducing the ReachBot concept, we discuss modeling approaches and strategies for increasing stability and robustness. We then develop a 2D analytical model for ReachBot's dynamics inspired by grasp models for dexterous manipulators. Next, we introduce a waypoint-tracking controller for a planar ReachBot in microgravity. Our simulation results demonstrate the controller's robustness to disturbances and modeling error. Finally, we briefly discuss next steps that build on these initially promising results to realize the full potential of ReachBot.