 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoid Whole-Body Manipulation via Active Spatial Brain and Generalizable Action Cerebellum
May 20, 2026In this paper, we explore spatial-aware humanoid whole-body manipulation task. Compared with tabletop settings, this task poses two key challenges: 1) Spatial understanding is challenging in complex 3D environments with diverse spatial relations. 2) Action generation is difficult to generalize, as limited and costly real-robot data restricts data-driven models generalization. To address these challenges, we propose a generalizable humanoid loco-manipulation framework that leverages the spatial perception and action generation capabilities of multi-agent large models. Specifically, our framework includes two components: Active Spatial Brain for active spatial perception and decision-making, and Generalizable Action Cerebellum for executable robot action generation. The first component actively perceives the spatial scene and makes decisions on task planning and subtask decomposition. The second component generate executable robot actions based on the decisions made by the first module without needs of task-specific real robot data. To benchmark our framework, we design a set of spatial manipulation tasks from two perspectives: evaluating spatial perception and understanding, and assessing real-robot task performance. The results demonstrate strong performance on both aspects across diverse tasks and environments.
BiDexGrasp: Coordinated Bimanual Dexterous Grasps across Object Geometries and Sizes
Apr 08, 2026Bimanual dexterous grasping is a fundamental and promising area in robotics, yet its progress is constrained by the lack of comprehensive datasets and powerful generation models. In this work, we propose BiDexGrasp, consists of a large-scale bimanual dexterous grasp dataset and a novel generation model. For dataset, we propose a novel bimanual grasp synthesis pipeline to efficiently annotate physically feasible data for dataset construction. This pipeline addresses the challenges of high-dimensional bimanual grasping through a two-stage synthesis strategy of efficient region-based grasp initialization and decoupled force-closure grasp optimization. Powered by this pipeline, we construct a large-scale bimanual dexterous grasp dataset, comprising 6351 diverse objects with sizes ranging from 30 to 80 cm, along with 9.7 million annotated grasp data. Based on this dataset, we further introduce a bimanual-coordinated and geometry-size-adaptive dexterous grasping generation framework. The framework lies in two key designs: a bimanual coordination module and a geometry-size-adaptive grasp generation strategy to generate coordinated and high-quality grasps on unseen objects. Extensive experiments conducted in both simulation and real world demonstrate the superior performance of our proposed data synthesis pipeline and learned generative framework.
Constitutional Classifiers++: Efficient Production-Grade Defenses against Universal Jailbreaks
Jan 08, 2026We introduce enhanced Constitutional Classifiers that deliver production-grade jailbreak robustness with dramatically reduced computational costs and refusal rates compared to previous-generation defenses. Our system combines several key insights. First, we develop exchange classifiers that evaluate model responses in their full conversational context, which addresses vulnerabilities in last-generation systems that examine outputs in isolation. Second, we implement a two-stage classifier cascade where lightweight classifiers screen all traffic and escalate only suspicious exchanges to more expensive classifiers. Third, we train efficient linear probe classifiers and ensemble them with external classifiers to simultaneously improve robustness and reduce computational costs. Together, these techniques yield a production-grade system achieving a 40x computational cost reduction compared to our baseline exchange classifier, while maintaining a 0.05% refusal rate on production traffic. Through extensive red-teaming comprising over 1,700 hours, we demonstrate strong protection against universal jailbreaks -- no attack on this system successfully elicited responses to all eight target queries comparable in detail to an undefended model. Our work establishes Constitutional Classifiers as practical and efficient safeguards for large language models.
OmniDexGrasp: Generalizable Dexterous Grasping via Foundation Model and Force Feedback
Oct 27, 2025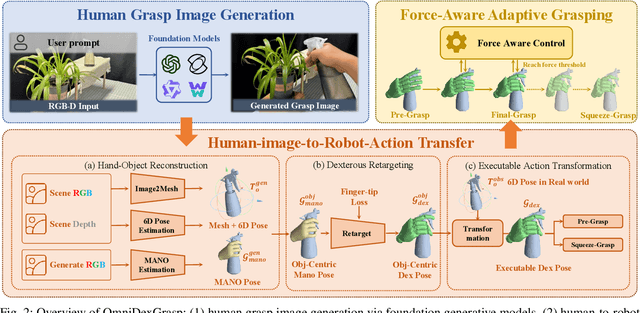
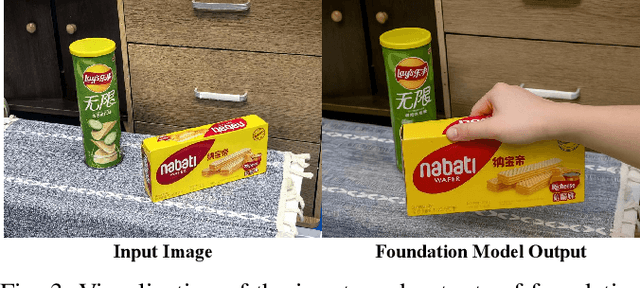
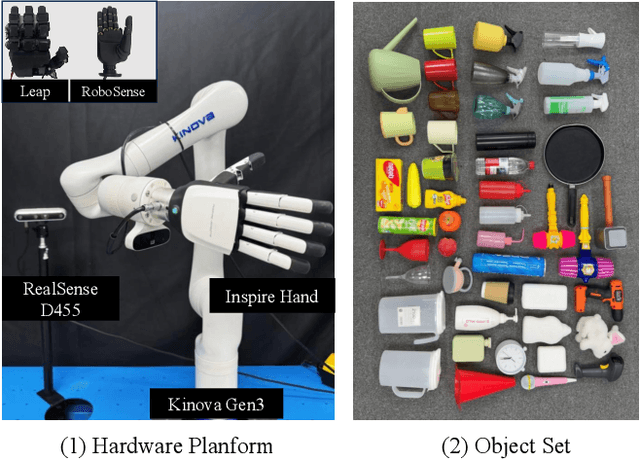
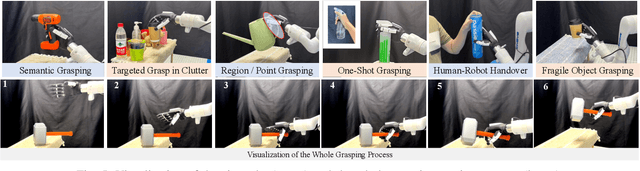
Enabling robots to dexterously grasp and manipulate objects based on human commands is a promising direction in robotics. However, existing approaches are challenging to generalize across diverse objects or tasks due to the limited scale of semantic dexterous grasp datasets. Foundation models offer a new way to enhance generalization, yet directly leveraging them to generate feasible robotic actions remains challenging due to the gap between abstract model knowledge and physical robot execution. To address these challenges, we propose OmniDexGrasp, a generalizable framework that achieves omni-capabilities in user prompting, dexterous embodiment, and grasping tasks by combining foundation models with the transfer and control strategies. OmniDexGrasp integrates three key modules: (i) foundation models are used to enhance generalization by generating human grasp images supporting omni-capability of user prompt and task; (ii) a human-image-to-robot-action transfer strategy converts human demonstrations into executable robot actions, enabling omni dexterous embodiment; (iii) force-aware adaptive grasp strategy ensures robust and stable grasp execution. Experiments in simulation and on real robots validate the effectiveness of OmniDexGrasp on diverse user prompts, grasp task and dexterous hands, and further results show its extensibility to dexterous manipulation tasks.
TypeTele: Releasing Dexterity in Teleoperation by Dexterous Manipulation Types
Jul 02, 2025



Dexterous teleoperation plays a crucial role in robotic manipulation for real-world data collection and remote robot control. Previous dexterous teleoperation mostly relies on hand retargeting to closely mimic human hand postures. However, these approaches may fail to fully leverage the inherent dexterity of dexterous hands, which can execute unique actions through their structural advantages compared to human hands. To address this limitation, we propose TypeTele, a type-guided dexterous teleoperation system, which enables dexterous hands to perform actions that are not constrained by human motion patterns. This is achieved by introducing dexterous manipulation types into the teleoperation system, allowing operators to employ appropriate types to complete specific tasks. To support this system, we build an extensible dexterous manipulation type library to cover comprehensive dexterous postures used in manipulation tasks. During teleoperation, we employ a MLLM (Multi-modality Large Language Model)-assisted type retrieval module to identify the most suitable manipulation type based on the specific task and operator commands. Extensive experiments of real-world teleoperation and imitation learning demonstrate that the incorporation of manipulation types significantly takes full advantage of the dexterous robot's ability to perform diverse and complex tasks with higher success rates.
AffordDexGrasp: Open-set Language-guided Dexterous Grasp with Generalizable-Instructive Affordance
Mar 10, 2025Language-guided robot dexterous generation enables robots to grasp and manipulate objects based on human commands. However, previous data-driven methods are hard to understand intention and execute grasping with unseen categories in the open set. In this work, we explore a new task, Open-set Language-guided Dexterous Grasp, and find that the main challenge is the huge gap between high-level human language semantics and low-level robot actions. To solve this problem, we propose an Affordance Dexterous Grasp (AffordDexGrasp) framework, with the insight of bridging the gap with a new generalizable-instructive affordance representation. This affordance can generalize to unseen categories by leveraging the object's local structure and category-agnostic semantic attributes, thereby effectively guiding dexterous grasp generation. Built upon the affordance, our framework introduces Affordacne Flow Matching (AFM) for affordance generation with language as input, and Grasp Flow Matching (GFM) for generating dexterous grasp with affordance as input. To evaluate our framework, we build an open-set table-top language-guided dexterous grasp dataset. Extensive experiments in the simulation and real worlds show that our framework surpasses all previous methods in open-set generalization.