 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAP: Slapband-based Autonomous Perching Drone with Failure Recovery for Vertical Tree Trunks
Jan 01, 2026Perching allows unmanned aerial vehicles (UAVs) to reduce energy consumption, remain anchored for surface sampling operations, or stably survey their surroundings. Previous efforts for perching on vertical surfaces have predominantly focused on lightweight mechanical design solutions with relatively scant system-level integration. Furthermore, perching strategies for vertical surfaces commonly require high-speed, aggressive landing operations that are dangerous for a surveyor drone with sensitive electronics onboard. This work presents the preliminary investigation of a perching approach suitable for larger drones that both gently perches on vertical tree trunks and reacts and recovers from perch failures. The system in this work, called SLAP, consists of vision-based perch site detector, an IMU (inertial-measurement-unit)-based perch failure detector, an attitude controller for soft perching, an optical close-range detection system, and a fast active elastic gripper with microspines made from commercially-available slapbands. We validated this approach on a modified 1.2 kg commercial quadrotor with component and system analysis. Initial human-in-the-loop autonomous indoor flight experiments achieved a 75% perch success rate on a real oak tree segment across 20 flights, and 100% perch failure recovery across 2 flights with induced failures.
CoinFT: A Coin-Sized, Capacitive 6-Axis Force Torque Sensor for Robotic Applications
Mar 25, 2025



We introduce CoinFT, a capacitive 6-axis force/torque (F/T) sensor that is compact, light, low-cost, and robust with an average mean-squared error of 0.11N for force and 0.84mNm for moment when the input ranges from 0~10N and 0~4N in normal and shear directions, respectively. CoinFT is a stack of two rigid PCBs with comb-shaped electrodes connected by an array of silicone rubber pillars. The microcontroller interrogates the electrodes in different subsets in order to enhance sensitivity for measuring 6-axis F/T. The combination of desirable features of CoinFT enables various contact-rich robot interactions at a scale, across different embodiment domains including drones, robot end-effectors, and wearable haptic devices. We demonstrate the utility of CoinFT on drones by performing an attitude-based force control to perform tasks that require careful contact force modulation. The design, fabrication, and firmware of CoinFT are open-sourced at https://hojung-choi.github.io/coinft.github.io/.
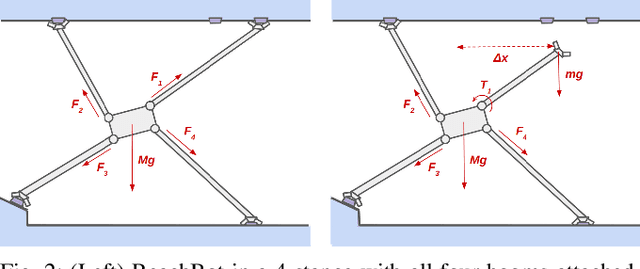
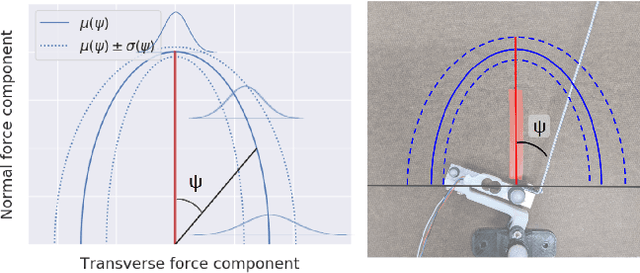
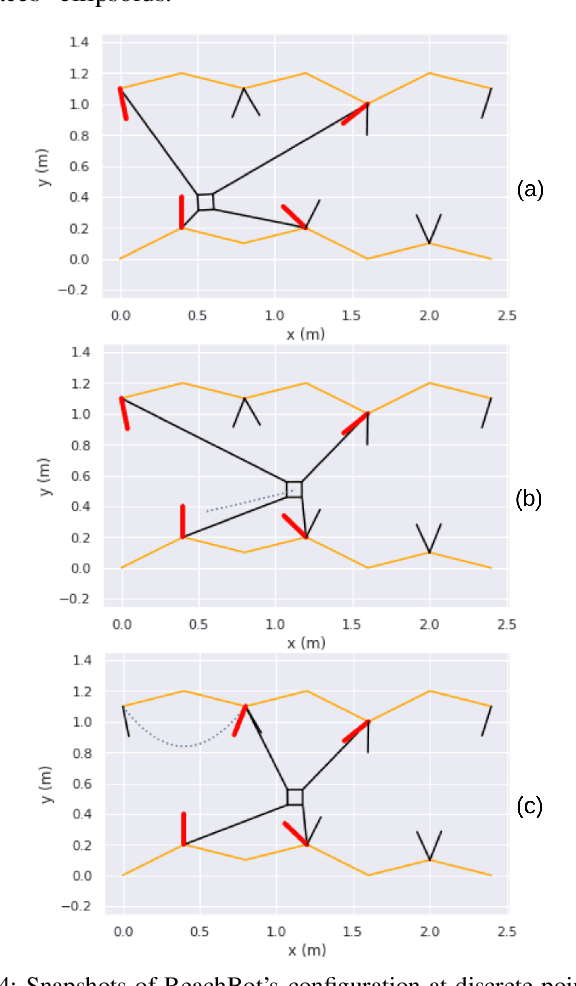
Locomotion as Manipulation with ReachBot
Jul 01, 2024Caves and lava tubes on the Moon and Mars are sites of geological and astrobiological interest but consist of terrain that is inaccessible with traditional robot locomotion. To support the exploration of these sites, we present ReachBot, a robot that uses extendable booms as appendages to manipulate itself with respect to irregular rock surfaces. The booms terminate in grippers equipped with microspines and provide ReachBot with a large workspace, allowing it to achieve force closure in enclosed spaces such as the walls of a lava tube. To propel ReachBot, we present a contact-before-motion planner for non-gaited legged locomotion that utilizes internal force control, similar to a multi-fingered hand, to keep its long, slender booms in tension. Motion planning also depends on finding and executing secure grips on rock features. We use a Monte Carlo simulation to inform gripper design and predict grasp strength and variability. Additionally, we use a two-step perception system to identify possible grasp locations. To validate our approach and mechanisms under realistic conditions, we deployed a single ReachBot arm and gripper in a lava tube in the Mojave Desert. The field test confirmed that ReachBot will find many targets for secure grasps with the proposed kinematic design.
Martian Exploration of Lava Tubes (MELT) with ReachBot: Scientific Investigation and Concept of Operations
Jun 19, 2024



As natural access points to the subsurface, lava tubes and other caves have become premier targets of planetary missions for astrobiological analyses. Few existing robotic paradigms, however, are able to explore such challenging environments. ReachBot is a robot that enables navigation in planetary caves by using extendable and retractable limbs to locomote. This paper outlines the potential science return and mission operations for a notional mission that deploys ReachBot to a martian lava tube. In this work, the motivating science goals and science traceability matrix are provided to guide payload selection. A Concept of Operations (ConOps) is also developed for ReachBot, providing a framework for deployment and activities on Mars, analyzing mission risks, and developing mitigation strategies
ReachBot Field Tests in a Mojave Desert Lava Tube as a Martian Analog
May 23, 2024



ReachBot is a robot concept for the planetary exploration of caves and lava tubes, which are often inaccessible with traditional robot locomotion methods. It uses extendable booms as appendages, with grippers mounted at the end, to grasp irregular rock surfaces and traverse these difficult terrains. We have built a partial ReachBot prototype consisting of a single boom and gripper, mounted on a tripod. We present the details on the design and field test of this partial ReachBot prototype in a lava tube in the Mojave Desert. The technical requirements of the field testing, implementation details, and grasp performance results are discussed. The planning and preparation of the field test and lessons learned are also given.
Feed Me: Robotic Infiltration of Poison Frog Families
May 23, 2023We present the design and operation of tadpole-mimetic robots prepared for a study of the parenting behaviors of poison frogs, which pair bond and raise their offspring. The mission of these robots is to convince poison frog parents that they are tadpoles, which need to be fed. Tadpoles indicate this need, at least in part, by wriggling with a characteristic frequency and amplitude. While the study is in progress, preliminary indications are that the TadBots have passed their test, at least for father frogs. We discuss the design and operational requirements for producing convincing TadBots and provide some details of the study design and plans for future work.
Motion Planning for a Climbing Robot with Stochastic Grasps
Sep 21, 2022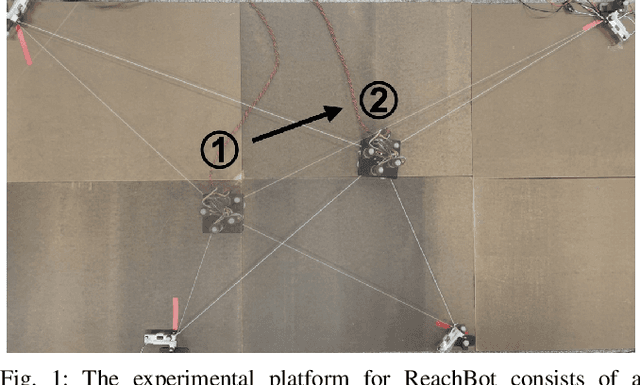
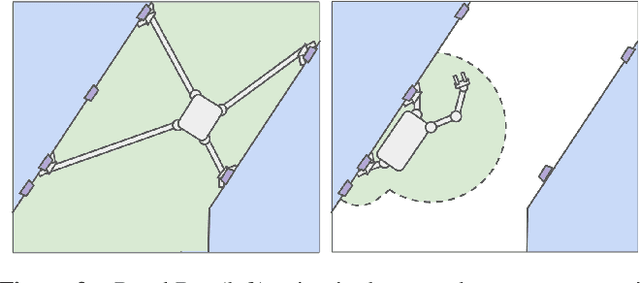
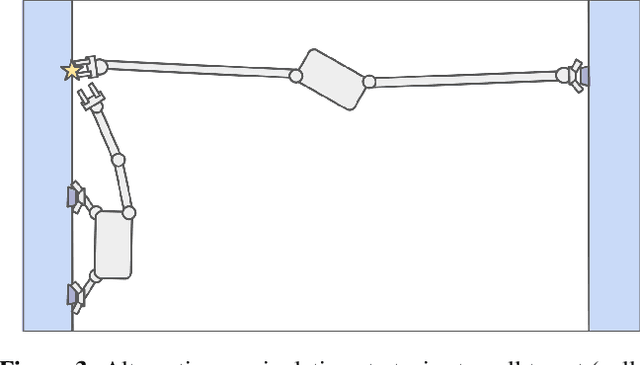
Motion planning for a multi-limbed climbing robot must consider the robot's posture, joint torques, and how it uses contact forces to interact with its environment. This paper focuses on motion planning for a robot that uses nontraditional locomotion to explore unpredictable environments such as martian caves. Our robotic concept, ReachBot, uses extendable and retractable booms as limbs to achieve a large reachable workspace while climbing. Each extendable boom is capped by a microspine gripper designed for grasping rocky surfaces. ReachBot leverages its large workspace to navigate around obstacles, over crevasses, and through challenging terrain. Our planning approach must be versatile to accommodate variable terrain features and robust to mitigate risks from the stochastic nature of grasping with spines. In this paper, we introduce a graph traversal algorithm to select a discrete sequence of grasps based on available terrain features suitable for grasping. This discrete plan is complemented by a decoupled motion planner that considers the alternating phases of body movement and end-effector movement, using a combination of sampling-based planning and sequential convex programming to optimize individual phases. We use our motion planner to plan a trajectory across a simulated 2D cave environment with at least 95% probability of success and demonstrate improved robustness over a baseline trajectory. Finally, we verify our motion planning algorithm through experimentation on a 2D planar prototype.
ReachBot: A Small Robot for Large Mobile Manipulation Tasks
Oct 20, 2021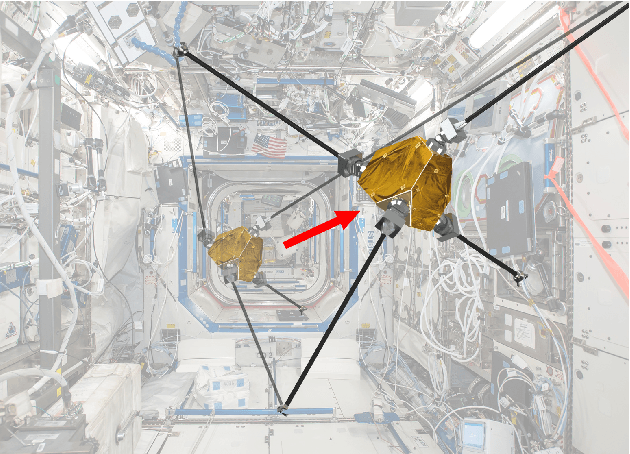
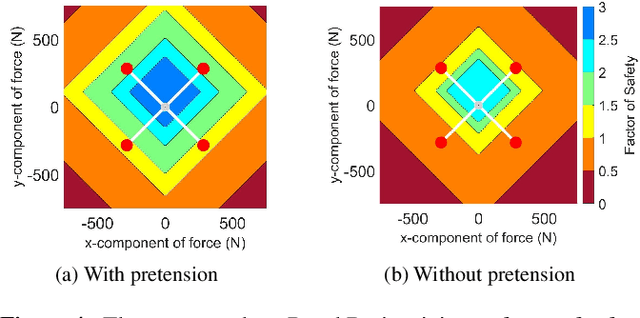
Robots are widely deployed in space environments because of their versatility and robustness. However, adverse gravity conditions and challenging terrain geometry expose the limitations of traditional robot designs, which are often forced to sacrifice one of mobility or manipulation capabilities to attain the other. Prospective climbing operations in these environments reveals a need for small, compact robots capable of versatile mobility and manipulation. We propose a novel robotic concept called ReachBot that fills this need by combining two existing technologies: extendable booms and mobile manipulation. ReachBot leverages the reach and tensile strength of extendable booms to achieve an outsized reachable workspace and wrench capability. Through their lightweight, compactable structure, these booms also reduce mass and complexity compared to traditional rigid-link articulated-arm designs. Using these advantages, ReachBot excels in mobile manipulation missions in low gravity or that require climbing, particularly when anchor points are sparse. After introducing the ReachBot concept, we discuss modeling approaches and strategies for increasing stability and robustness. We then develop a 2D analytical model for ReachBot's dynamics inspired by grasp models for dexterous manipulators. Next, we introduce a waypoint-tracking controller for a planar ReachBot in microgravity. Our simulation results demonstrate the controller's robustness to disturbances and modeling error. Finally, we briefly discuss next steps that build on these initially promising results to realize the full potential of ReachBot.