 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Shared Embodied Intelligence in Humanoid Robots through Optimization Development and Testing of the Human Aware ergoCub Robot
May 26, 2026Collaboration is central to human behavior, enabling tasks beyond individual capability. This ability arises from coordinating actions through internal representations of others, a concept known as shared intelligence. Additionally, humans are characterized by physical bodies and cognitive abilities that are optimized in response to their environment, a phenomenon referred to as embodied cognition. Designing humanoid robots that collaborate safely and effectively with people requires unifying these principles. Here we propose an architecture that integrates shared intelligence and embodied cognition to enable robots to physically collaborate with humans, where robot hardware and control are optimized for human metrics, using representations of the human body and motion intelligence. The ultimate goal is to achieve a form of shared embodied intelligence. Specifically, our architecture optimizes robot hardware and physical intelligence parameters with respect to human ergonomic metrics. This is accomplished by modeling human-robot interaction as a function of hardware configurations and embedding human models into the robot's physical intelligence. As a concrete implementation, we present the humanoid robot ergoCub, whose morphology and control have been optimized for collaborative tasks with humans. Our approach provides a framework for designing humanoid robots that prioritize human ergonomics at both the hardware and physical intelligence levels, with applications in industrial and assistive robotics.
iCub3 Avatar System
Mar 14, 2022
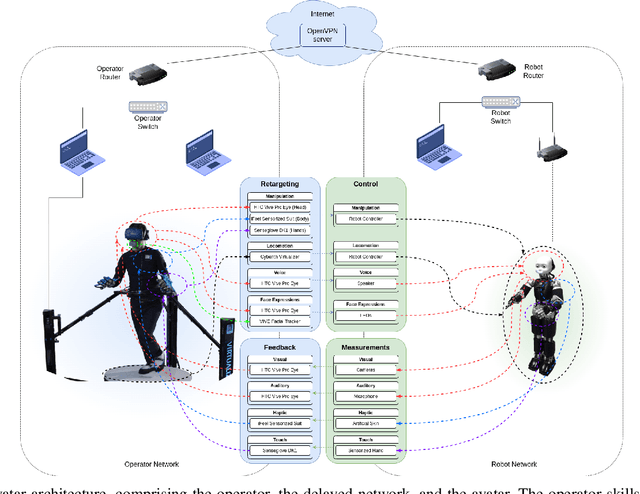
We present an avatar system that enables a human operator to visit a remote location via iCub3, a new humanoid robot developed at the Italian Institute of Technology (IIT) paving the way for the next generation of the iCub platforms. On the one hand, we present the humanoid iCub3 that plays the role of the robotic avatar. Particular attention is paid to the differences between iCub3 and the classical iCub humanoid robot. On the other hand, we present the set of technologies of the avatar system at the operator side. They are mainly composed of iFeel, namely, IIT lightweight non-invasive wearable devices for motion tracking and haptic feedback, and of non-IIT technologies designed for virtual reality ecosystems. Finally, we show the effectiveness of the avatar system by describing a demonstration involving a realtime teleoperation of the iCub3. The robot is located in Venice, Biennale di Venezia, while the human operator is at more than 290km distance and located in Genoa, IIT. Using a standard fiber optic internet connection, the avatar system transports the operator locomotion, manipulation, voice, and face expressions to the iCub3 with visual, auditory, haptic and touch feedback.
In Situ Translational Hand-Eye Calibration of Laser Profile Sensors using Arbitrary Objects
Mar 22, 2021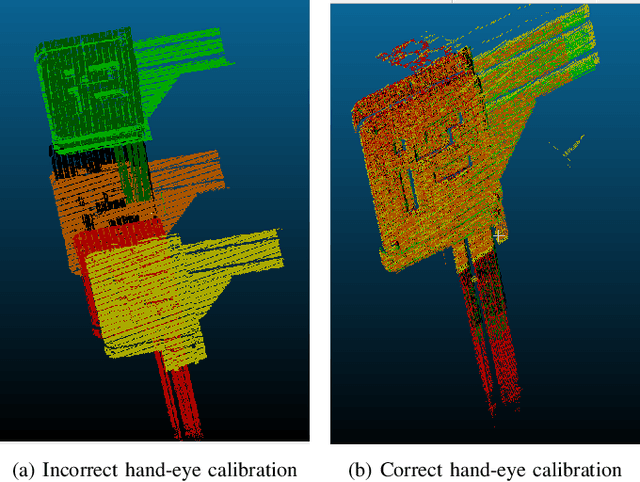
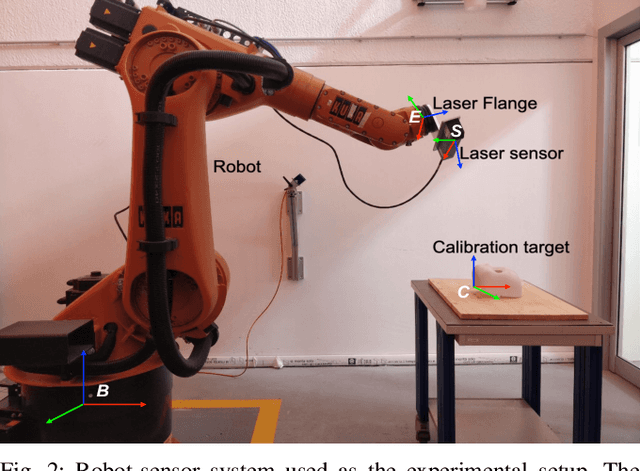

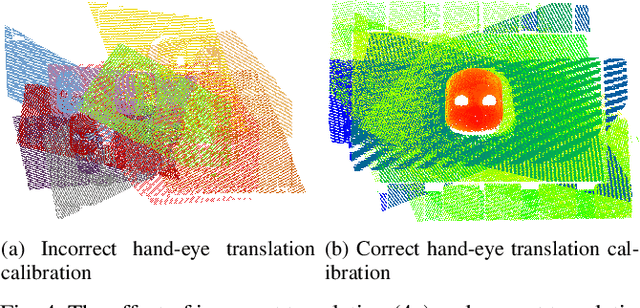
Hand-eye calibration of laser profile sensors is the process of extracting the homogeneous transformation between the laser profile sensor frame and the end-effector frame of a robot in order to express the data extracted by the sensor in the robot's global coordinate system. For laser profile scanners this is a challenging procedure, as they provide data only in two dimensions and state-of-the-art calibration procedures require the use of specialised calibration targets. This paper presents a novel method to extract the translation-part of the hand-eye calibration matrix with rotation-part known a priori in a target-agnostic way. Our methodology is applicable to any 2D image or 3D object as a calibration target and can also be performed in situ in the final application. The method is experimentally validated on a real robot-sensor setup with 2D and 3D targets.
A Flexible and Robust Large Scale Capacitive Tactile System for Robots
Nov 25, 2014

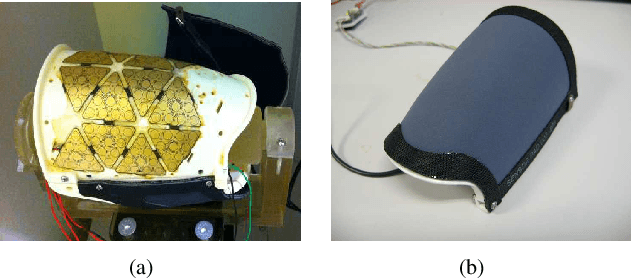
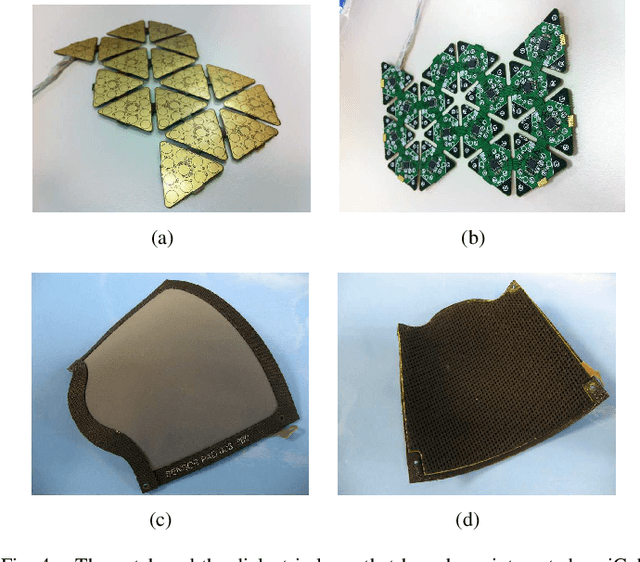
Capacitive technology allows building sensors that are small, compact and have high sensitivity. For this reason it has been widely adopted in robotics. In a previous work we presented a compliant skin system based on capacitive technology consisting of triangular modules interconnected to form a system of sensors that can be deployed on non-flat surfaces. This solution has been successfully adopted to cover various humanoid robots. The main limitation of this and all the approaches based on capacitive technology is that they require to embed a deformable dielectric layer (usually made using an elastomer) covered by a conductive layer. This complicates the production process considerably, introduces hysteresis and limits the durability of the sensors due to ageing and mechanical stress. In this paper we describe a novel solution in which the dielectric is made using a thin layer of 3D fabric which is glued to conductive and protective layers using techniques adopted in the clothing industry. As such, the sensor is easier to produce and has better mechanical properties. Furthermore, the sensor proposed in this paper embeds transducers for thermal compensation of the pressure measurements. We report experimental analysis that demonstrates that the sensor has good properties in terms of sensitivity and resolution. Remarkably we show that the sensor has very low hysteresis and effectively allows compensating drifts due to temperature variations.