 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Whole-Body Avoidance Motion through Localized Proximity Sensing
Dec 05, 2024This paper presents a novel control algorithm for robotic manipulators in unstructured environments using proximity sensors partially distributed on the platform. The proposed approach exploits arrays of multi zone Time-of-Flight (ToF) sensors to generate a sparse point cloud representation of the robot surroundings. By employing computational geometry techniques, we fuse the knowledge of robot geometric model with ToFs sensory feedback to generate whole-body motion tasks, allowing to move both sensorized and non-sensorized links in response to unpredictable events such as human motion. In particular, the proposed algorithm computes the pair of closest points between the environment cloud and the robot links, generating a dynamic avoidance motion that is implemented as the highest priority task in a two-level hierarchical architecture. Such a design choice allows the robot to work safely alongside humans even without a complete sensorization over the whole surface. Experimental validation demonstrates the algorithm effectiveness both in static and dynamic scenarios, achieving comparable performances with respect to well established control techniques that aim to move the sensors mounting positions on the robot body. The presented algorithm exploits any arbitrary point on the robot surface to perform avoidance motion, showing improvements in the distance margin up to 100 mm, due to the rendering of virtual avoidance tasks on non-sensorized links.
Touch-to-Touch Translation -- Learning the Mapping Between Heterogeneous Tactile Sensing Technologies
Nov 04, 2024



The use of data-driven techniques for tactile data processing and classification has recently increased. However, collecting tactile data is a time-expensive and sensor-specific procedure. Indeed, due to the lack of hardware standards in tactile sensing, data is required to be collected for each different sensor. This paper considers the problem of learning the mapping between two tactile sensor outputs with respect to the same physical stimulus -- we refer to this problem as touch-to-touch translation. In this respect, we proposed two data-driven approaches to address this task and we compared their performance. The first one exploits a generative model developed for image-to-image translation and adapted for this context. The second one uses a ResNet model trained to perform a regression task. We validated both methods using two completely different tactile sensors -- a camera-based, Digit and a capacitance-based, CySkin. In particular, we used Digit images to generate the corresponding CySkin data. We trained the models on a set of tactile features that can be found in common larger objects and we performed the testing on a previously unseen set of data. Experimental results show the possibility of translating Digit images into the CySkin output by preserving the contact shape and with an error of 15.18% in the magnitude of the sensor responses.
Tactile Sensing
May 07, 2021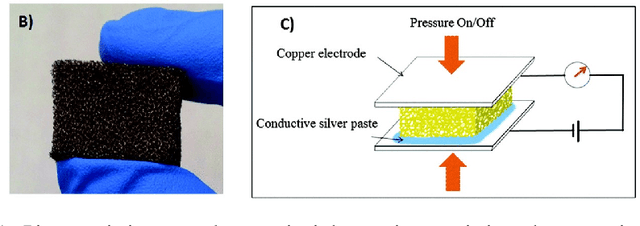
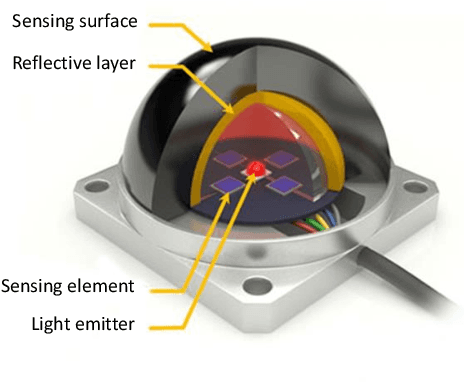
Research on tactile sensing has been progressing at constant pace. In robotics, tactile sensing is typically studied in the context of object grasping and manipulation. In this domain, the development of robust, multi-modal, tactile sensors for robotic hands has supported the study of novel algorithms for in-hand object manipulation, material classification and object perception. In the field of humanoid robotics, research has focused on solving the challenges that allow developing systems of tactile sensors that can cover large areas of the robot body, and can integrate different types of transducers to measure pressure at various frequency bands, acceleration and temperature. The availability of such systems has extended the application of tactile sensing to whole-body control, autonomous calibration, self-perception and human-robot interaction. The goal of this Chapter is to provide an overview of the technologies for tactile sensing, with particular emphasis on the systems that have been deployed on humanoid robots. We describe the skills that have been implemented with the adoption of these technologies and discuss the main challenges that remain to be addressed.
Contact modelling and tactile data processing for robot skin
Sep 21, 2018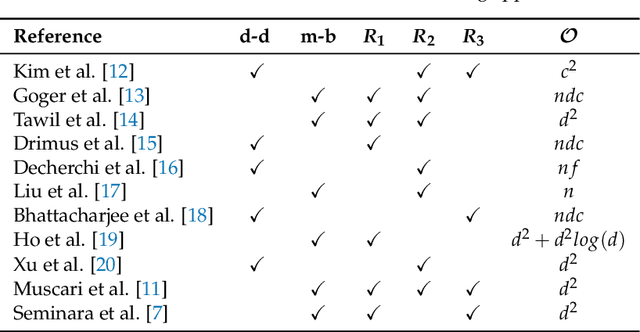
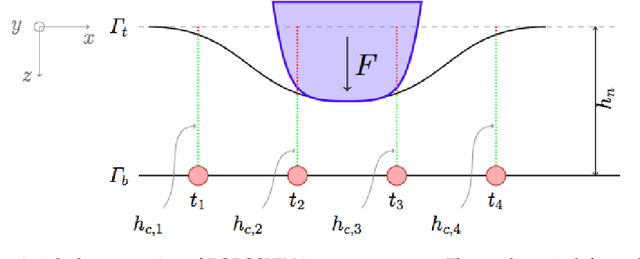
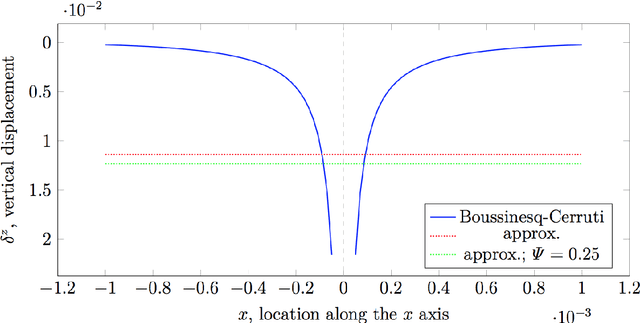
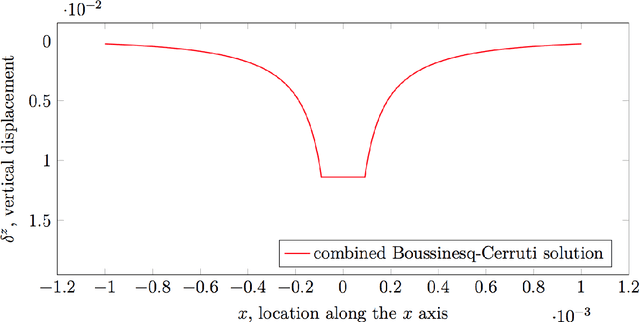
Tactile sensing is a key enabling technology to develop complex behaviours for robots interacting with humans or the environment. This paper discusses computational aspects playing a significant role when extracting information about contact events. Considering a large-scale, capacitance-based robot skin technology we developed in the past few years, we analyse the classical Boussinesq-Cerruti's solution and the Love's approach for solving a distributed inverse contact problem, both from a qualitative and a computational perspective. Our contribution is the characterisation of algorithms performance using a freely available dataset and data originating from surfaces provided with robot skin.
A Flexible and Robust Large Scale Capacitive Tactile System for Robots
Nov 25, 2014

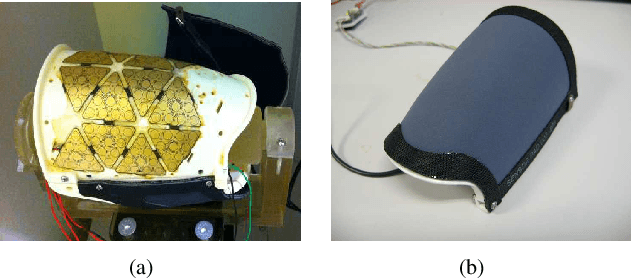
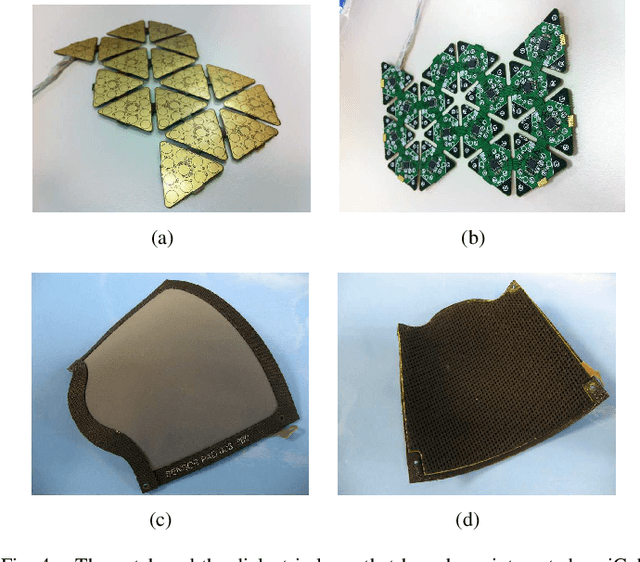
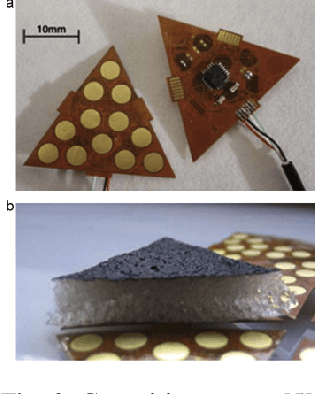
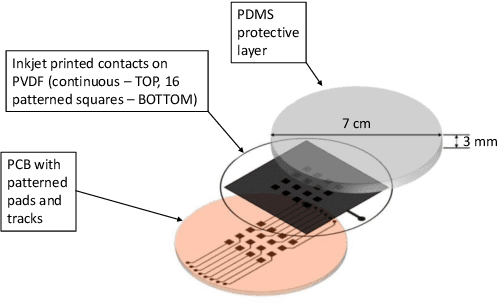
Capacitive technology allows building sensors that are small, compact and have high sensitivity. For this reason it has been widely adopted in robotics. In a previous work we presented a compliant skin system based on capacitive technology consisting of triangular modules interconnected to form a system of sensors that can be deployed on non-flat surfaces. This solution has been successfully adopted to cover various humanoid robots. The main limitation of this and all the approaches based on capacitive technology is that they require to embed a deformable dielectric layer (usually made using an elastomer) covered by a conductive layer. This complicates the production process considerably, introduces hysteresis and limits the durability of the sensors due to ageing and mechanical stress. In this paper we describe a novel solution in which the dielectric is made using a thin layer of 3D fabric which is glued to conductive and protective layers using techniques adopted in the clothing industry. As such, the sensor is easier to produce and has better mechanical properties. Furthermore, the sensor proposed in this paper embeds transducers for thermal compensation of the pressure measurements. We report experimental analysis that demonstrates that the sensor has good properties in terms of sensitivity and resolution. Remarkably we show that the sensor has very low hysteresis and effectively allows compensating drifts due to temperature variations.