 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Flights inside Narrow Tunnels
May 26, 2025



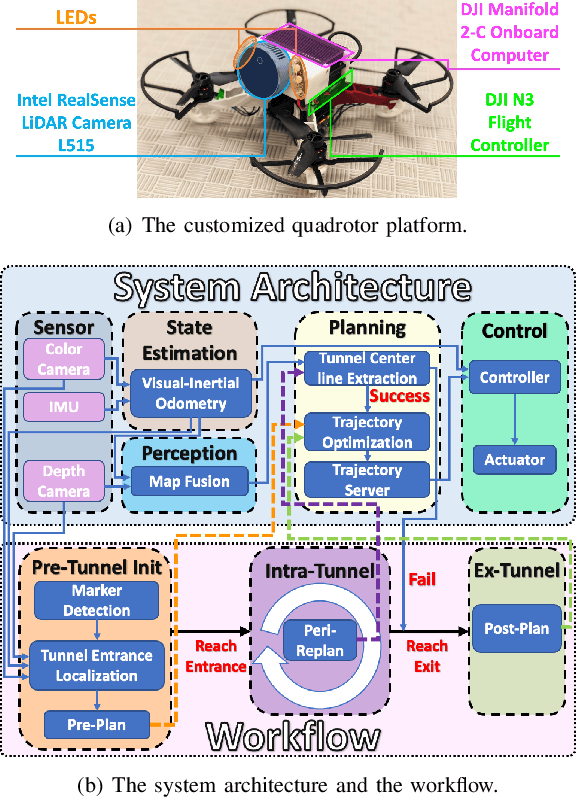
Multirotors are usually desired to enter confined narrow tunnels that are barely accessible to humans in various applications including inspection, search and rescue, and so on. This task is extremely challenging since the lack of geometric features and illuminations, together with the limited field of view, cause problems in perception; the restricted space and significant ego airflow disturbances induce control issues. This paper introduces an autonomous aerial system designed for navigation through tunnels as narrow as 0.5 m in diameter. The real-time and online system includes a virtual omni-directional perception module tailored for the mission and a novel motion planner that incorporates perception and ego airflow disturbance factors modeled using camera projections and computational fluid dynamics analyses, respectively. Extensive flight experiments on a custom-designed quadrotor are conducted in multiple realistic narrow tunnels to validate the superior performance of the system, even over human pilots, proving its potential for real applications. Additionally, a deployment pipeline on other multirotor platforms is outlined and open-source packages are provided for future developments.
Knowledge Migration Framework for Smart Contract Vulnerability Detection
Dec 15, 2024



As a cornerstone of blockchain technology in the 3.0 era, smart contracts play a pivotal role in the evolution of blockchain systems. In order to address the limitations of existing smart contract vulnerability detection models with regard to their generalisation capability, an AF-STip smart contract vulnerability detection framework incorporating efficient knowledge migration is proposed. AF-STip employs the teacher network as the main model and migrates the knowledge processed by the smart contract to the student model using a data-free knowledge distillation method. The student model utilises this knowledge to enhance its vulnerability detection capabilities. The approach markedly enhances the model's capacity for feature extraction and cross-class adaptation, while concurrently reducing computational overhead.In order to further enhance the extraction of vulnerability features, an adaptive fusion module is proposed in this paper, which aims to strengthen the interaction and fusion of feature information.The experimental results demonstrate that the STip model attains an average F1 value detection score of 91.16% for the four vulnerabilities without disclosing the original smart contract data. To validate the viability of the proposed lightweight migration approach, the student model is deployed in a migration learning task targeting a novel vulnerability type, resulting in an accuracy of 91.02% and an F1 score of 90.46%. To the best of our knowledge, AF-STip is the inaugural model to apply data-free knowledge migration to smart contract vulnerability detection. While markedly reducing the computational overhead, the method still demonstrates exceptional performance in detecting novel vulnerabilities.
VINS-Multi: A Robust Asynchronous Multi-camera-IMU State Estimator
May 23, 2024State estimation is a critical foundational module in robotics applications, where robustness and performance are paramount. Although in recent years, many works have been focusing on improving one of the most widely adopted state estimation methods, visual inertial odometry (VIO), by incorporating multiple cameras, these efforts predominantly address synchronous camera systems. Asynchronous cameras, which offer simpler hardware configurations and enhanced resilience, have been largely overlooked. To fill this gap, this paper presents VINS-Multi, a novel multi-camera-IMU state estimator for asynchronous cameras. The estimator comprises parallel front ends, a front end coordinator, and a back end optimization module capable of handling asynchronous input frames. It utilizes the frames effectively through a dynamic feature number allocation and a frame priority coordination strategy. The proposed estimator is integrated into a customized quadrotor platform and tested in multiple realistic and challenging scenarios to validate its practicality. Additionally, comprehensive benchmark results are provided to showcase the robustness and superior performance of the proposed estimator.
Exploration with Global Consistency Using Real-Time Re-integration and Active Loop Closure
Apr 06, 2022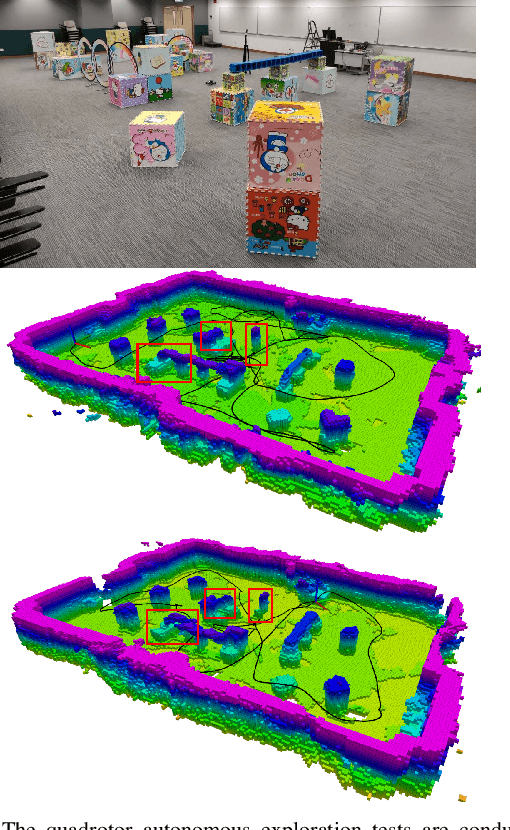
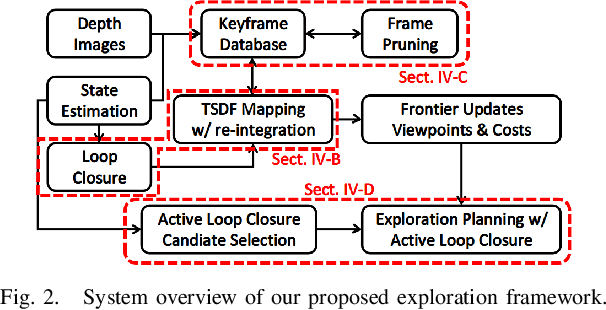
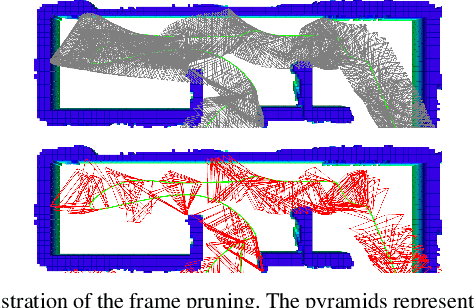
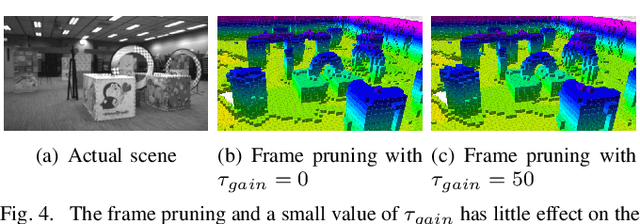
Despite recent progress of robotic exploration, most methods assume that drift-free localization is available, which is problematic in reality and causes severe distortion of the reconstructed map. In this work, we present a systematic exploration mapping and planning framework that deals with drifted localization, allowing efficient and globally consistent reconstruction. A real-time re-integration-based mapping approach along with a frame pruning mechanism is proposed, which rectifies map distortion effectively when drifted localization is corrected upon detecting loop-closure. Besides, an exploration planning method considering historical viewpoints is presented to enable active loop closing, which promotes a higher opportunity to correct localization errors and further improves the mapping quality. We evaluate both the mapping and planning methods as well as the entire system comprehensively in simulation and real-world experiments, showing their effectiveness in practice. The implementation of the proposed method will be made open-source for the benefit of the robotics community.
Neither Fast Nor Slow: How to Fly Through Narrow Tunnels
Jan 10, 2022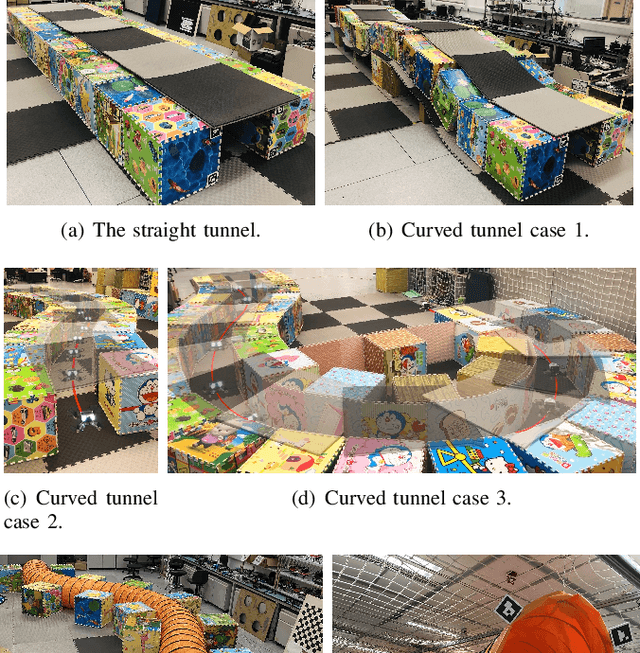
Nowadays, multirotors are playing important roles in abundant types of missions. During these missions, entering confined and narrow tunnels that are barely accessible to humans is desirable yet extremely challenging for multirotors. The restricted space and significant ego airflow disturbances induce control issues at both fast and slow flight speeds, meanwhile bringing about problems in state estimation and perception. Thus, a smooth trajectory at a proper speed is necessary for safe tunnel flights. To address these challenges, in this letter, a complete autonomous aerial system that can fly smoothly through tunnels with dimensions narrow to 0.6 m is presented. The system contains a motion planner that generates smooth mini-jerk trajectories along the tunnel center lines, which are extracted according to the map and Euclidean Distance Field (EDF), and its practical speed range is obtained through computational fluid dynamics (CFD) and flight data analyses. Extensive flight experiments on the quadrotor are conducted inside multiple narrow tunnels to validate the planning framework as well as the robustness of the whole system.
Estimation and Adaption of Indoor Ego Airflow Disturbance with Application to Quadrotor Trajectory Planning
Sep 10, 2021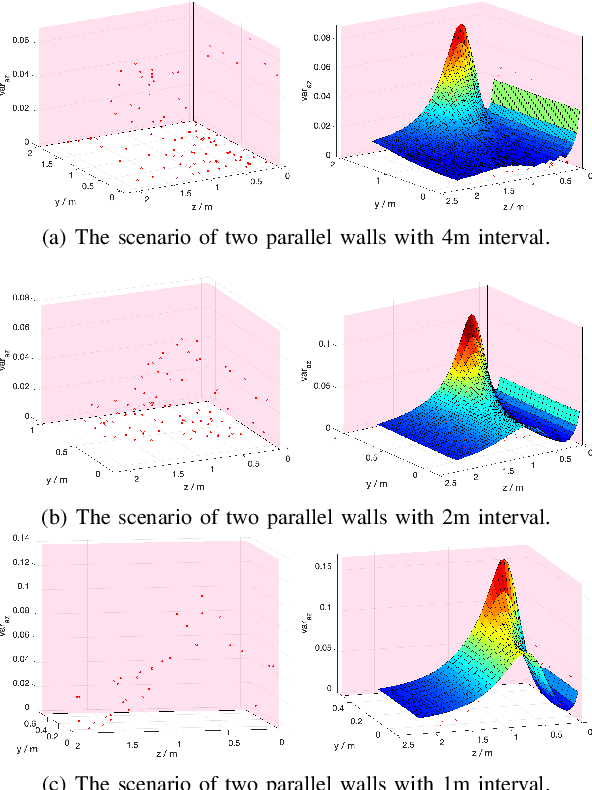
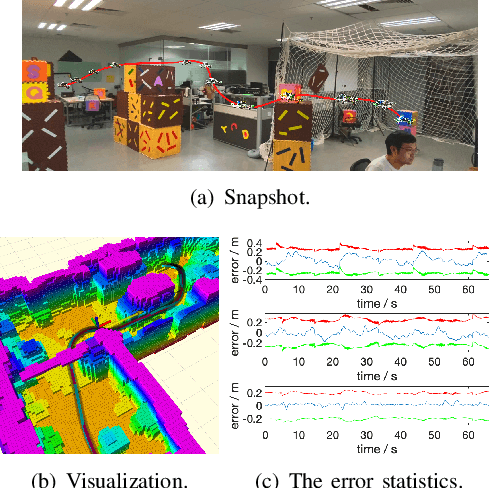
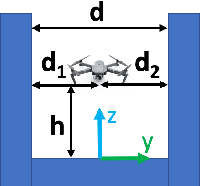
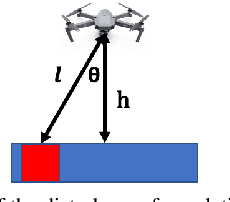
It is ubiquitously accepted that during the autonomous navigation of the quadrotors, one of the most widely adopted unmanned aerial vehicles (UAVs), safety always has the highest priority. However, it is observed that the ego airflow disturbance can be a significant adverse factor during flights, causing potential safety issues, especially in narrow and confined indoor environments. Therefore, we propose a novel method to estimate and adapt indoor ego airflow disturbance of quadrotors, meanwhile applying it to trajectory planning. Firstly, the hover experiments for different quadrotors are conducted against the proximity effects. Then with the collected acceleration variance, the disturbances are modeled for the quadrotors according to the proposed formulation. The disturbance model is also verified under hover conditions in different reconstructed complex environments. Furthermore, the approximation of Hamilton-Jacobi reachability analysis is performed according to the estimated disturbances to facilitate the safe trajectory planning, which consists of kinodynamic path search as well as B-spline trajectory optimization. The whole planning framework is validated on multiple quadrotor platforms in different indoor environments.
Omni-swarm: A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial Swarm
Apr 04, 2021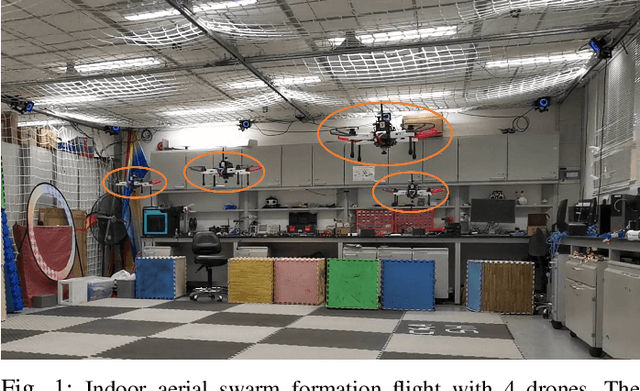
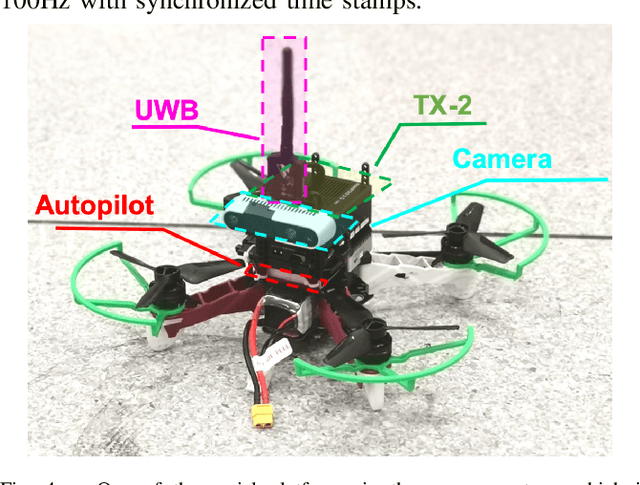
The decentralized state estimation is one of the most fundamental components for autonomous aerial swarm systems in GPS-denied areas, which still remains a highly challenging research topic. To address this research niche, the Omni-swarm, a decentralized omnidirectional visual-inertial-UWB state estimation system for the aerial swarm is proposed in this paper. In order to solve the issues of observability, complicated initialization, insufficient accuracy and lack of global consistency, we introduce an omnidirectional perception system as the front-end of the Omni-swarm, consisting of omnidirectional sensors, which includes stereo fisheye cameras and ultra-wideband (UWB) sensors, and algorithms, which includes fisheye visual inertial odometry (VIO), multi-drone map-based localization and visual object detector. A graph-based optimization and forward propagation working as the back-end of the Omni-swarm to fuse the measurements from the front-end. According to the experiment result, the proposed decentralized state estimation method on the swarm system achieves centimeter-level relative state estimation accuracy while ensuring global consistency. Moreover, supported by the Omni-swarm, inter-drone collision avoidance can be accomplished in a whole decentralized scheme without any external device, demonstrating the potential of Omni-swarm to be the foundation of autonomous aerial swarm flights in different scenarios.
Decentralized Visual-Inertial-UWB Fusion for Relative State Estimation of Aerial Swarm
Mar 11, 2020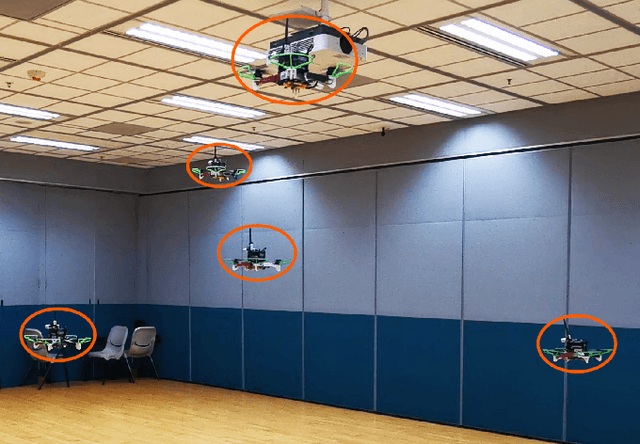
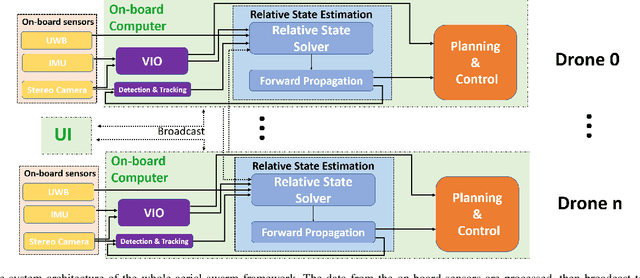
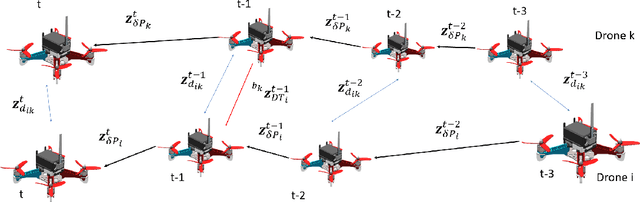
The collaboration of unmanned aerial vehicles (UAVs) has become a popular research topic for its practicability in multiple scenarios. The collaboration of multiple UAVs, which is also known as aerial swarm is a highly complex system, which still lacks a state-of-art decentralized relative state estimation method. In this paper, we present a novel fully decentralized visual-inertial-UWB fusion framework for relative state estimation and demonstrate the practicability by performing extensive aerial swarm flight experiments. The comparison result with ground truth data from the motion capture system shows the centimeter-level precision which outperforms all the Ultra-WideBand (UWB) and even vision based method. The system is not limited by the field of view (FoV) of the camera or Global Positioning System (GPS), meanwhile on account of its estimation consistency, we believe that the proposed relative state estimation framework has the potential to be prevalently adopted by aerial swarm applications in different scenarios in multiple scales.
Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight
Jul 03, 2019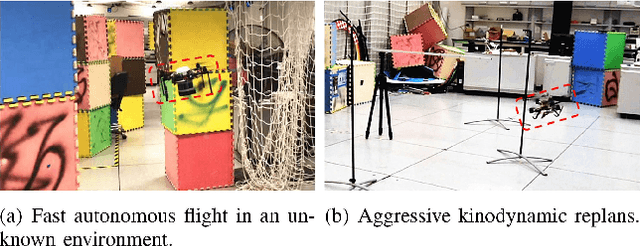
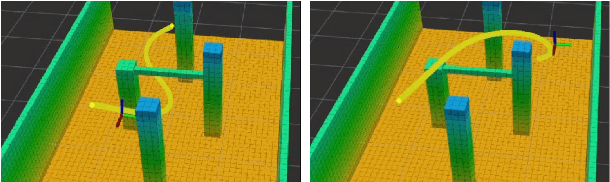
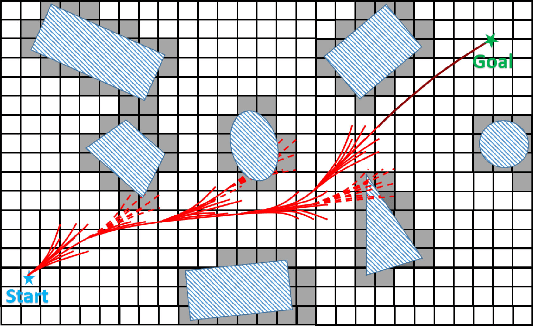
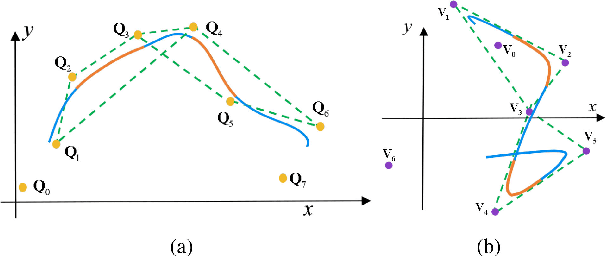
In this paper, we propose a robust and efficient quadrotor motion planning system for fast flight in 3-D complex environments. We adopt a kinodynamic path searching method to find a safe, kinodynamic feasible and minimum-time initial trajectory in the discretized control space. We improve the smoothness and clearance of the trajectory by a B-spline optimization, which incorporates gradient information from a Euclidean distance field (EDF) and dynamic constraints efficiently utilizing the convex hull property of B-spline. Finally, by representing the final trajectory as a non-uniform B-spline, an iterative time adjustment method is adopted to guarantee dynamically feasible and non-conservative trajectories. We validate our proposed method in various complex simulational environments. The competence of the method is also validated in challenging real-world tasks. We release our code as an open-source package.
Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments
Jul 01, 2019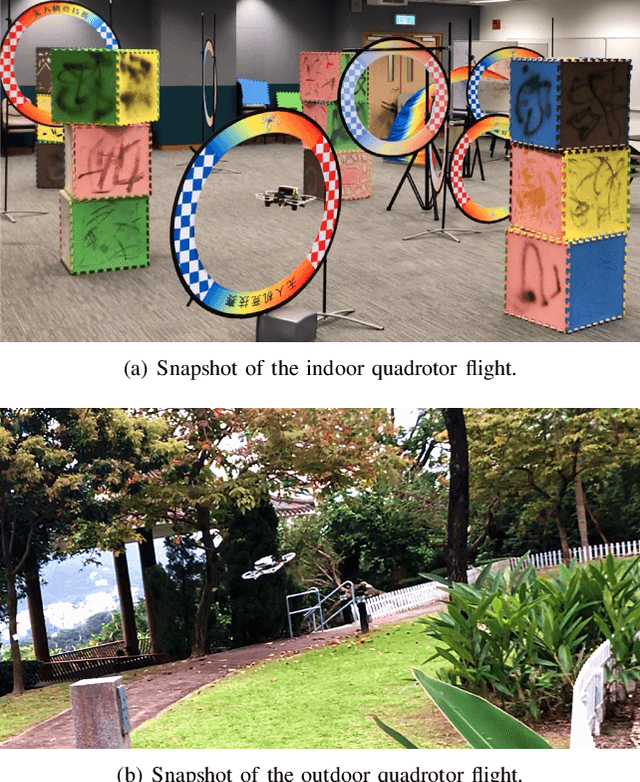
In this paper, we propose a complete and robust motion planning system for the aggressive flight of autonomous quadrotors. The proposed method is built upon on a classical teach-and-repeat framework, which is widely adopted in infrastructure inspection, aerial transportation, and search-and-rescue. For these applications, human's intention is essential to decide the topological structure of the flight trajectory of the drone. However, poor teaching trajectories and changing environments prevent a simple teach-and-repeat system from being applied flexibly and robustly. In this paper, instead of commanding the drone to precisely follow a teaching trajectory, we propose a method to automatically convert a human-piloted trajectory, which can be arbitrarily jerky, to a topologically equivalent one. The generated trajectory is guaranteed to be smooth, safe, and kinodynamically feasible, with a human preferable aggressiveness. Also, to avoid unmapped or dynamic obstacles during flights, a sliding-windowed local perception and re-planning method are introduced to our system, to generate safe local trajectories onboard. We name our system as teach-repeat-replan. It can capture users' intention of a flight mission, convert an arbitrarily jerky teaching path to a smooth repeating trajectory, and generate safe local re-plans to avoid unmapped or moving obstacles. The proposed planning system is integrated into a complete autonomous quadrotor with global and local perception and localization sub-modules. Our system is validated by performing aggressive flights in challenging indoor/outdoor environments. We release all components in our quadrotor system as open-source ros-packages.