 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
GPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
Noise-Reuse in Online Evolution Strategies
Apr 21, 2023



Online evolution strategies have become an attractive alternative to automatic differentiation (AD) due to their ability to handle chaotic and black-box loss functions, while also allowing more frequent gradient updates than vanilla Evolution Strategies (ES). In this work, we propose a general class of unbiased online evolution strategies. We analytically and empirically characterize the variance of this class of gradient estimators and identify the one with the least variance, which we term Noise-Reuse Evolution Strategies (NRES). Experimentally, we show that NRES results in faster convergence than existing AD and ES methods in terms of wall-clock speed and total number of unroll steps across a variety of applications, including learning dynamical systems, meta-training learned optimizers, and reinforcement learning.
General-Purpose In-Context Learning by Meta-Learning Transformers
Dec 08, 2022



Modern machine learning requires system designers to specify aspects of the learning pipeline, such as losses, architectures, and optimizers. Meta-learning, or learning-to-learn, instead aims to learn those aspects, and promises to unlock greater capabilities with less manual effort. One particularly ambitious goal of meta-learning is to train general-purpose in-context learning algorithms from scratch, using only black-box models with minimal inductive bias. Such a model takes in training data, and produces test-set predictions across a wide range of problems, without any explicit definition of an inference model, training loss, or optimization algorithm. In this paper we show that Transformers and other black-box models can be meta-trained to act as general-purpose in-context learners. We characterize phase transitions between algorithms that generalize, algorithms that memorize, and algorithms that fail to meta-train at all, induced by changes in model size, number of tasks, and meta-optimization. We further show that the capabilities of meta-trained algorithms are bottlenecked by the accessible state size (memory) determining the next prediction, unlike standard models which are thought to be bottlenecked by parameter count. Finally, we propose practical interventions such as biasing the training distribution that improve the meta-training and meta-generalization of general-purpose learning algorithms.
Transformer-Based Learned Optimization
Dec 02, 2022



In this paper, we propose a new approach to learned optimization. As common in the literature, we represent the computation of the update step of the optimizer with a neural network. The parameters of the optimizer are then learned on a set of training optimization tasks, in order to perform minimisation efficiently. Our main innovation is to propose a new neural network architecture for the learned optimizer inspired by the classic BFGS algorithm. As in BFGS, we estimate a preconditioning matrix as a sum of rank-one updates but use a transformer-based neural network to predict these updates jointly with the step length and direction. In contrast to several recent learned optimization approaches, our formulation allows for conditioning across different dimensions of the parameter space of the target problem while remaining applicable to optimization tasks of variable dimensionality without retraining. We demonstrate the advantages of our approach on a benchmark composed of objective functions traditionally used for evaluation of optimization algorithms, as well as on the real world-task of physics-based reconstruction of articulated 3D human motion.
VeLO: Training Versatile Learned Optimizers by Scaling Up
Nov 17, 2022



While deep learning models have replaced hand-designed features across many domains, these models are still trained with hand-designed optimizers. In this work, we leverage the same scaling approach behind the success of deep learning to learn versatile optimizers. We train an optimizer for deep learning which is itself a small neural network that ingests gradients and outputs parameter updates. Meta-trained with approximately four thousand TPU-months of compute on a wide variety of optimization tasks, our optimizer not only exhibits compelling performance, but optimizes in interesting and unexpected ways. It requires no hyperparameter tuning, instead automatically adapting to the specifics of the problem being optimized. We open source our learned optimizer, meta-training code, the associated train and test data, and an extensive optimizer benchmark suite with baselines at velo-code.github.io.
Discovered Policy Optimisation
Oct 13, 2022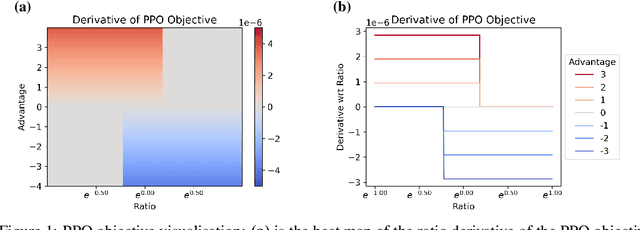
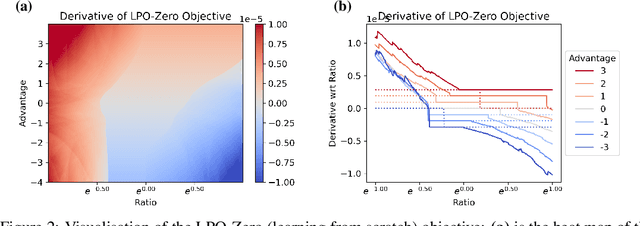
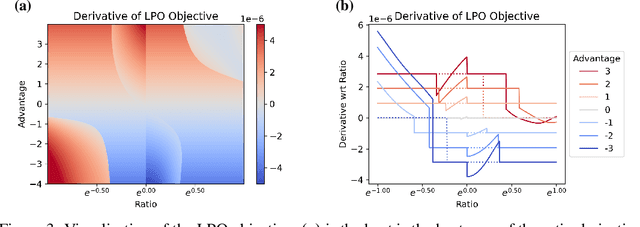
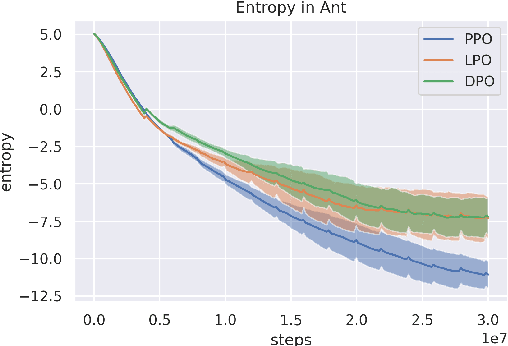
Tremendous progress has been made in reinforcement learning (RL) over the past decade. Most of these advancements came through the continual development of new algorithms, which were designed using a combination of mathematical derivations, intuitions, and experimentation. Such an approach of creating algorithms manually is limited by human understanding and ingenuity. In contrast, meta-learning provides a toolkit for automatic machine learning method optimisation, potentially addressing this flaw. However, black-box approaches which attempt to discover RL algorithms with minimal prior structure have thus far not outperformed existing hand-crafted algorithms. Mirror Learning, which includes RL algorithms, such as PPO, offers a potential middle-ground starting point: while every method in this framework comes with theoretical guarantees, components that differentiate them are subject to design. In this paper we explore the Mirror Learning space by meta-learning a "drift" function. We refer to the immediate result as Learnt Policy Optimisation (LPO). By analysing LPO we gain original insights into policy optimisation which we use to formulate a novel, closed-form RL algorithm, Discovered Policy Optimisation (DPO). Our experiments in Brax environments confirm state-of-the-art performance of LPO and DPO, as well as their transfer to unseen settings.
A Closer Look at Learned Optimization: Stability, Robustness, and Inductive Biases
Sep 22, 2022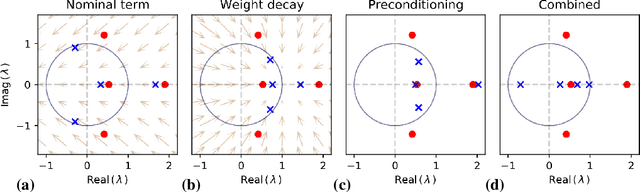
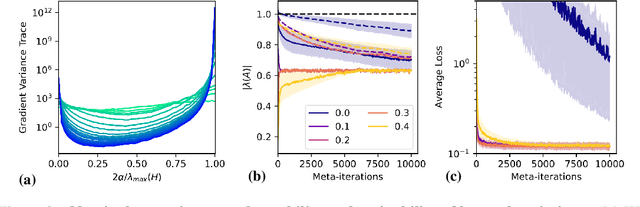
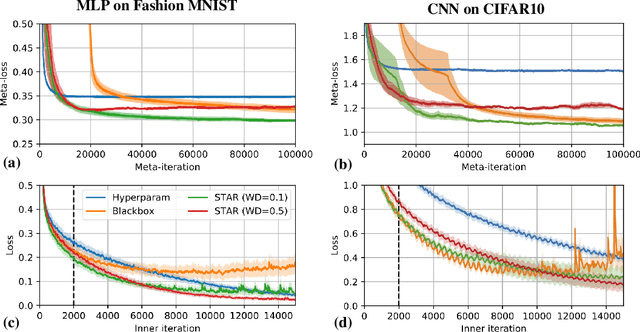
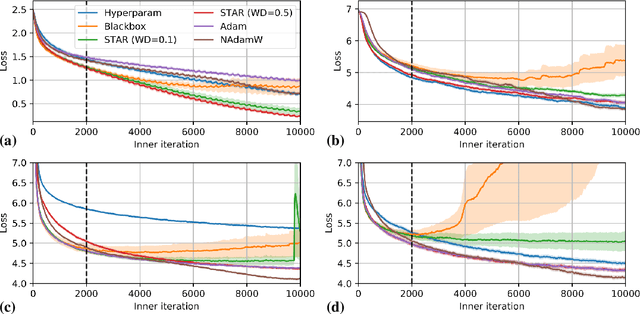
Learned optimizers -- neural networks that are trained to act as optimizers -- have the potential to dramatically accelerate training of machine learning models. However, even when meta-trained across thousands of tasks at huge computational expense, blackbox learned optimizers often struggle with stability and generalization when applied to tasks unlike those in their meta-training set. In this paper, we use tools from dynamical systems to investigate the inductive biases and stability properties of optimization algorithms, and apply the resulting insights to designing inductive biases for blackbox optimizers. Our investigation begins with a noisy quadratic model, where we characterize conditions in which optimization is stable, in terms of eigenvalues of the training dynamics. We then introduce simple modifications to a learned optimizer's architecture and meta-training procedure which lead to improved stability, and improve the optimizer's inductive bias. We apply the resulting learned optimizer to a variety of neural network training tasks, where it outperforms the current state of the art learned optimizer -- at matched optimizer computational overhead -- with regard to optimization performance and meta-training speed, and is capable of generalization to tasks far different from those it was meta-trained on.
Beyond the Imitation Game: Quantifying and extrapolating the capabilities of language models
Jun 10, 2022Language models demonstrate both quantitative improvement and new qualitative capabilities with increasing scale. Despite their potentially transformative impact, these new capabilities are as yet poorly characterized. In order to inform future research, prepare for disruptive new model capabilities, and ameliorate socially harmful effects, it is vital that we understand the present and near-future capabilities and limitations of language models. To address this challenge, we introduce the Beyond the Imitation Game benchmark (BIG-bench). BIG-bench currently consists of 204 tasks, contributed by 442 authors across 132 institutions. Task topics are diverse, drawing problems from linguistics, childhood development, math, common-sense reasoning, biology, physics, social bias, software development, and beyond. BIG-bench focuses on tasks that are believed to be beyond the capabilities of current language models. We evaluate the behavior of OpenAI's GPT models, Google-internal dense transformer architectures, and Switch-style sparse transformers on BIG-bench, across model sizes spanning millions to hundreds of billions of parameters. In addition, a team of human expert raters performed all tasks in order to provide a strong baseline. Findings include: model performance and calibration both improve with scale, but are poor in absolute terms (and when compared with rater performance); performance is remarkably similar across model classes, though with benefits from sparsity; tasks that improve gradually and predictably commonly involve a large knowledge or memorization component, whereas tasks that exhibit "breakthrough" behavior at a critical scale often involve multiple steps or components, or brittle metrics; social bias typically increases with scale in settings with ambiguous context, but this can be improved with prompting.
Practical tradeoffs between memory, compute, and performance in learned optimizers
Apr 01, 2022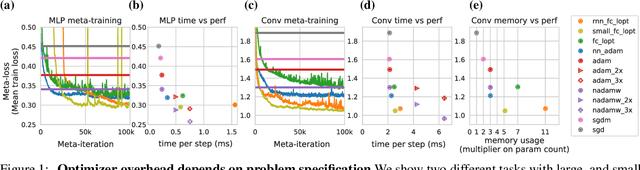

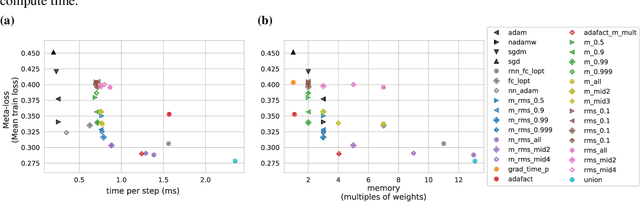
Optimization plays a costly and crucial role in developing machine learning systems. In learned optimizers, the few hyperparameters of commonly used hand-designed optimizers, e.g. Adam or SGD, are replaced with flexible parametric functions. The parameters of these functions are then optimized so that the resulting learned optimizer minimizes a target loss on a chosen class of models. Learned optimizers can both reduce the number of required training steps and improve the final test loss. However, they can be expensive to train, and once trained can be expensive to use due to computational and memory overhead for the optimizer itself. In this work, we identify and quantify the design features governing the memory, compute, and performance trade-offs for many learned and hand-designed optimizers. We further leverage our analysis to construct a learned optimizer that is both faster and more memory efficient than previous work.