 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSMILE: Robust Network Localization via Sparse and Low-Rank Matrix Decomposition
Jan 26, 2023Motivated by collaborative localization in robotic sensor networks, we consider the problem of large-scale network localization where location estimates are derived from inter-node radio signals. Well-established methods for network localization commonly assume that all radio links are line-of-sight and subject to Gaussian noise. However, the presence of obstacles which cause non-line-of-sight attenuation present distinct challenges. To enable robust network localization, we present Sparse Matrix Inference and Linear Embedding (SMILE), a novel approach which draws on both the well-known Locally Linear Embedding (LLE) algorithm and recent advances in sparse plus low-rank matrix decomposition. We demonstrate that our approach is robust to noisy signal propagation, severe attenuation due to non-line-of-sight, and missing pairwise measurements. Our experiments include simulated large-scale networks, an 11-node sensor network, and an 18-node network of mobile robots and static anchor radios in a GPS-denied limestone mine. Our findings indicate that SMILE outperforms classical multidimensional scaling (MDS) which ignores the effect of non-line of sight (NLOS), as well as outperforming state-of-the-art robust network localization algorithms that do account for NLOS attenuation including a graph convolutional network-based approach. We demonstrate that this improved accuracy is not at the cost of complexity, as SMILE sees reduced computation time for very large networks which is important for position estimation updates in a dynamic setting, e.g for mobile robots.
ACHORD: Communication-Aware Multi-Robot Coordination with Intermittent Connectivity
Jun 05, 2022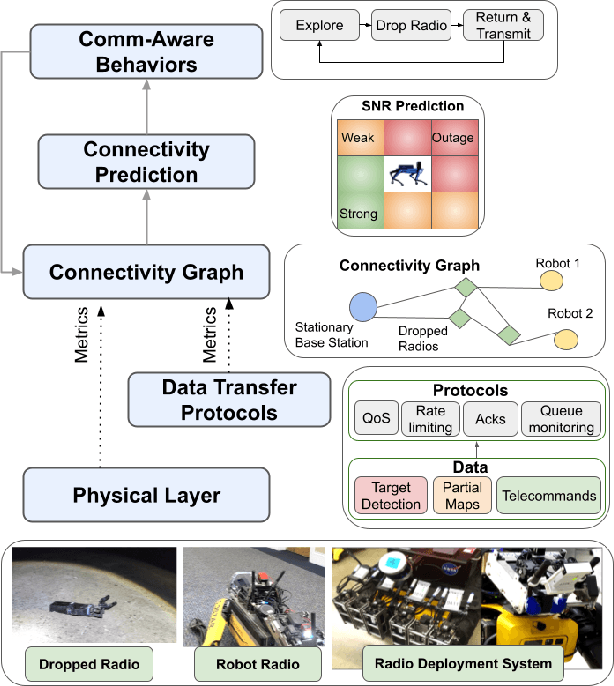
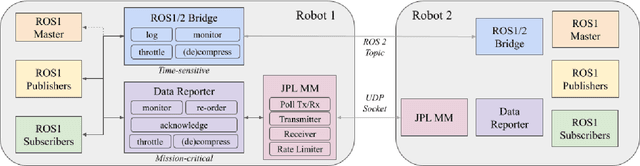
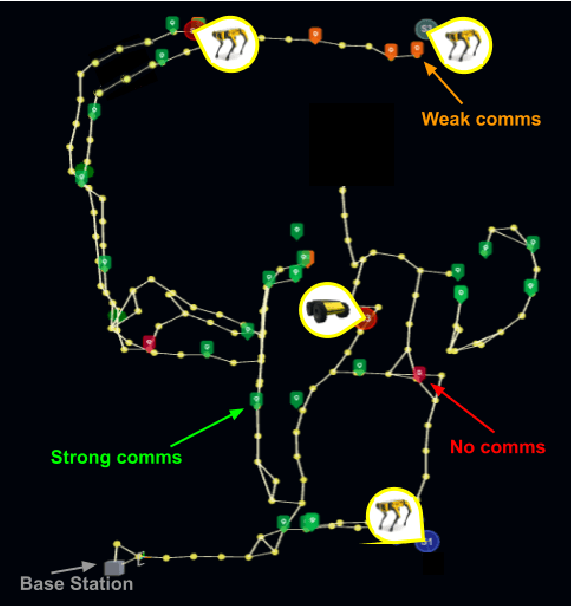
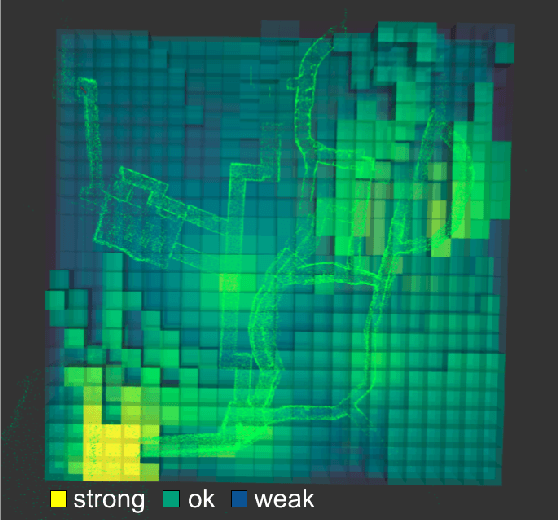
Communication is an important capability for multi-robot exploration because (1) inter-robot communication (comms) improves coverage efficiency and (2) robot-to-base comms improves situational awareness. Exploring comms-restricted (e.g., subterranean) environments requires a multi-robot system to tolerate and anticipate intermittent connectivity, and to carefully consider comms requirements, otherwise mission-critical data may be lost. In this paper, we describe and analyze ACHORD (Autonomous & Collaborative High-Bandwidth Operations with Radio Droppables), a multi-layer networking solution which tightly co-designs the network architecture and high-level decision-making for improved comms. ACHORD provides bandwidth prioritization and timely and reliable data transfer despite intermittent connectivity. Furthermore, it exposes low-layer networking metrics to the application layer to enable robots to autonomously monitor, map, and extend the network via droppable radios, as well as restore connectivity to improve collaborative exploration. We evaluate our solution with respect to the comms performance in several challenging underground environments including the DARPA SubT Finals competition environment. Our findings support the use of data stratification and flow control to improve bandwidth-usage.
PropEM-L: Radio Propagation Environment Modeling and Learning for Communication-Aware Multi-Robot Exploration
May 03, 2022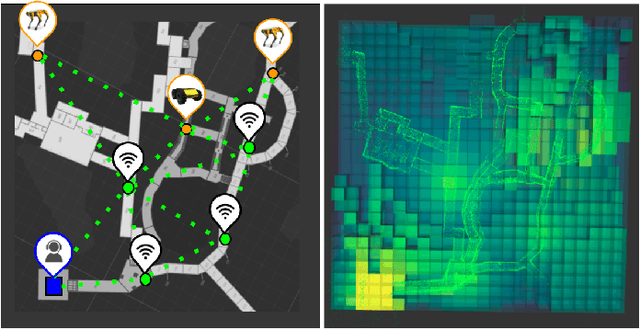
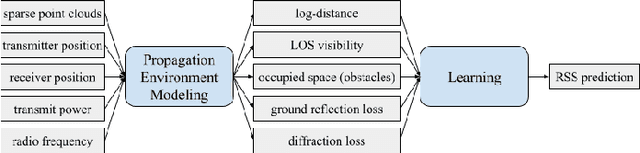
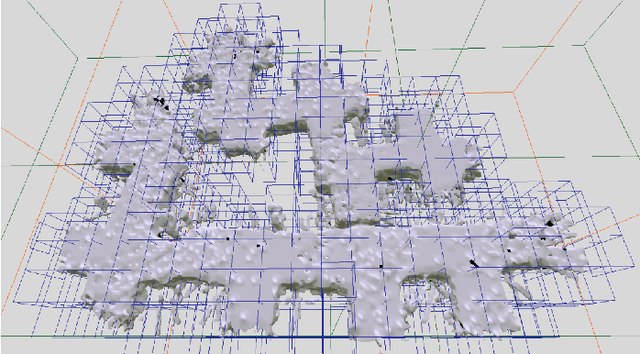
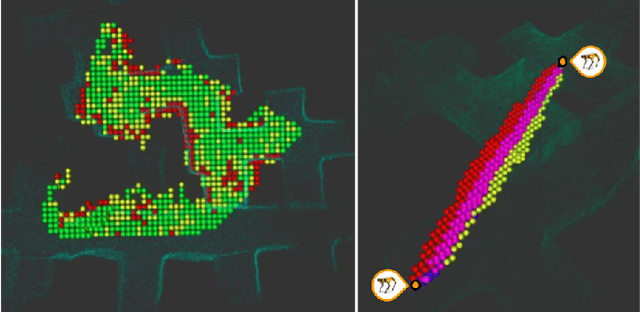
Multi-robot exploration of complex, unknown environments benefits from the collaboration and cooperation offered by inter-robot communication. Accurate radio signal strength prediction enables communication-aware exploration. Models which ignore the effect of the environment on signal propagation or rely on a priori maps suffer in unknown, communication-restricted (e.g. subterranean) environments. In this work, we present Propagation Environment Modeling and Learning (PropEM-L), a framework which leverages real-time sensor-derived 3D geometric representations of an environment to extract information about line of sight between radios and attenuating walls/obstacles in order to accurately predict received signal strength (RSS). Our data-driven approach combines the strengths of well-known models of signal propagation phenomena (e.g. shadowing, reflection, diffraction) and machine learning, and can adapt online to new environments. We demonstrate the performance of PropEM-L on a six-robot team in a communication-restricted environment with subway-like, mine-like, and cave-like characteristics, constructed for the 2021 DARPA Subterranean Challenge. Our findings indicate that PropEM-L can improve signal strength prediction accuracy by up to 44% over a log-distance path loss model.
Privacy-Utility Trades in Crowdsourced Signal Map Obfuscation
Jan 13, 2022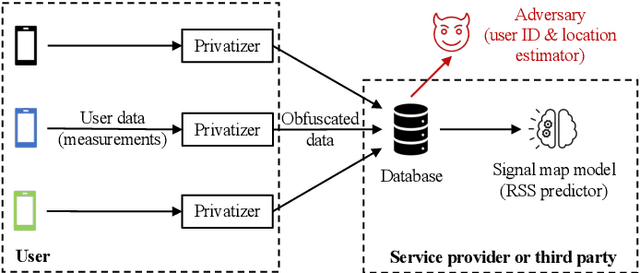

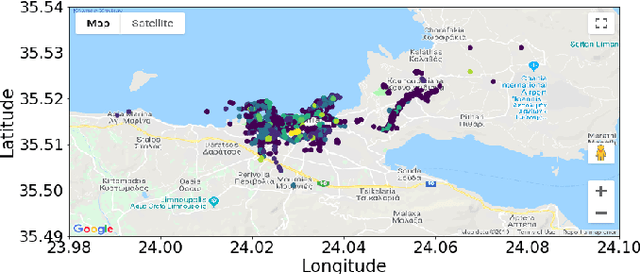
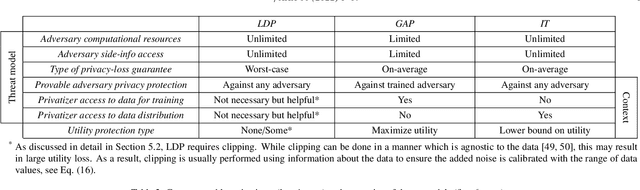
Cellular providers and data aggregating companies crowdsource celluar signal strength measurements from user devices to generate signal maps, which can be used to improve network performance. Recognizing that this data collection may be at odds with growing awareness of privacy concerns, we consider obfuscating such data before the data leaves the mobile device. The goal is to increase privacy such that it is difficult to recover sensitive features from the obfuscated data (e.g. user ids and user whereabouts), while still allowing network providers to use the data for improving network services (i.e. create accurate signal maps). To examine this privacy-utility tradeoff, we identify privacy and utility metrics and threat models suited to signal strength measurements. We then obfuscate the measurements using several preeminent techniques, spanning differential privacy, generative adversarial privacy, and information-theoretic privacy techniques, in order to benchmark a variety of promising obfuscation approaches and provide guidance to real-world engineers who are tasked to build signal maps that protect privacy without hurting utility. Our evaluation results, based on multiple, diverse, real-world signal map datasets, demonstrate the feasibility of concurrently achieving adequate privacy and utility, with obfuscation strategies which use the structure and intended use of datasets in their design, and target average-case, rather than worst-case, guarantees.
TEAM: Trilateration for Exploration and Mapping with Robotic Networks
Jul 08, 2020
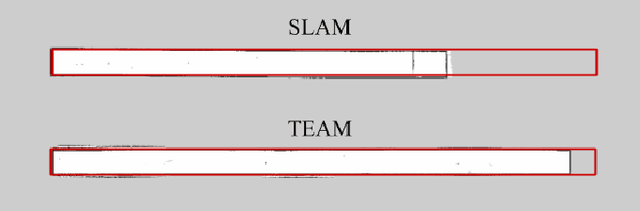
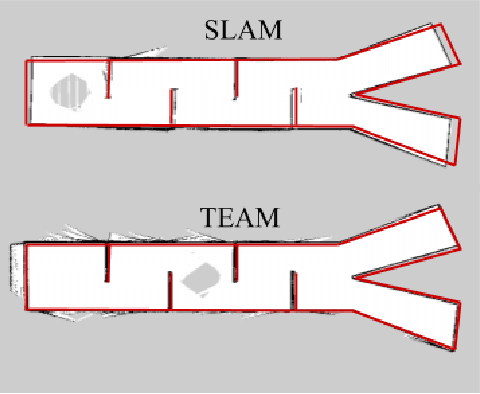
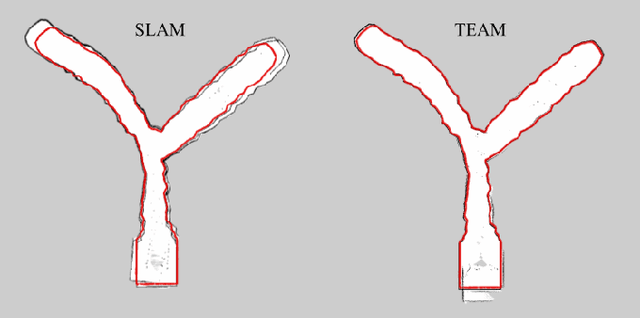
Localization and mapping are often considered simultaneously; however, the use of robotic networks in unknown environment exploration motivates a fundamentally different approach in which robots can act as both mobile agents and instantaneous anchors in a cooperative positioning system. We present Trilateration for Exploration and Mapping (TEAM), a novel algorithm for creating maps of unknown environments with a network of mobile robots. TEAM is designed to leverage the capability of commercially-available ultra-wideband (UWB) radios to provide range estimates with centimeter accuracy and perform anchorless localization in a shared, stationary frame. We provide experimental results in varied Gazebo simulation environments as well as on a testbed of Turtlebot3 Burgers with Pozyx UWB radios. We compare TEAM to the popular Rao-Blackwellized Particle Filter for Simultaneous Localization and Mapping (SLAM). We demonstrate that TEAM (1) reduces the maximum localization error by 50\% (2) requires an order of magnitude less computational complexity (3) reduces the necessary sample rate of LiDAR measurements by an order of magnitude and (4) achieves up to a 28\% increase in map accuracy in feature-deprived environments and comparable map accuracy in other settings.