 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexFuture: Hierarchical Future-State Visuomotor Targeting for Bimanual Dexterous Tool Use
Jun 04, 2026Bimanual dexterous tool use remains challenging for robots due to high-dimensional hand configurations and complex hand-tool-object dynamics and contact. Most existing control policies depend on future configuration references provided from demonstrations, while future action-conditioned world models require slow online planning over high-dimensional action sequences. A significant challenge is generating a dynamically consistent future reference trajectory without relying on privileged states from demonstrations or slow counterfactual planning. We propose DexFuture, a hierarchical system that couples a high-level Future-State Visuomotor Target Predictor with a low-level Target-Conditioned Structured Dexterous Policy. Conditioned on egocentric RGB, proprioceptive and geometric history, the high-level predictor constructs structured hand-tool-object visuomotor embeddings and uses a horizon-conditioned transformer to generate a multi-step future target trajectory. Then, the low-level policy tracks them with a target-conditioned per-link transformer. This hierarchy decouples coarse future reference generation from fine-grained action control, and slow long-horizon semantic prediction from high-frequency execution. On OakInk2 bimanual tool-use tasks, DexFuture achieves 90% of the privileged-oracle performance, compared to 7% for a no-reference policy. DexFuture operates at 60 Hz, approximately 250 times faster than DexWM-style Cross-Entropy Method (CEM) planning with a future action-conditioned world model.
Object-Informed Model Predictive Path Integral Control for Non-Prehensile Robot Manipulation
May 29, 2026Long-horizon planning for non-prehensile robot manipulation is challenging due to underactuated and discontinuous interactions. We propose a hierarchical formulation of model predictive path integral (MPPI) control that guides robot-level planning with a separately computed object-level plan to achieve efficient long-horizon prediction. We first solve a simplified object-only problem, assuming the object can be actuated directly, and use the planned object trajectory as a reference in solving the joint robot-object planning problem. We evaluate our method in both simulation and hardware using a 6-DoF xArm6 manipulator to perform object pushing tasks in which the target object must reach a goal while avoiding static obstacles, necessitating non-myopic reasoning. Our object-informed MPPI increases task success by 40\% with a 26\% faster control frequency in simulation, and by 20\% in real experiments with similar computation as regular MPPI.
PhysGraph: Physically-Grounded Graph-Transformer Policies for Bimanual Dexterous Hand-Tool-Object Manipulation
Mar 02, 2026Bimanual dexterous manipulation for tool use remains a formidable challenge in robotics due to the high-dimensional state space and complicated contact dynamics. Existing methods naively represent the entire system state as a single configuration vector, disregarding the rich structural and topological information inherent to articulated hands. We present PhysGraph, a physically-grounded graph transformer policy designed explicitly for challenging bimanual hand-tool-object manipulation. Unlike prior works, we represent the bimanual system as a kinematic graph and introduce per-link tokenization to preserve fine-grained local state information. We propose a physically-grounded bias generator that injects structural priors directly into the attention mechanism, including kinematic spatial distance, dynamic contact states, geometric proximity, and anatomical properties. This allows the policy to explicitly reason about physical interactions rather than learning them implicitly from sparse rewards. Extensive experiments show that PhysGraph significantly outperforms baseline - ManipTrans in manipulation precision and task success rates while using only 51% of the parameters of ManipTrans. Furthermore, the inherent topological flexibility of our architecture shows qualitative zero-shot transfer to unseen tool/object geometries, and is sufficiently general to be trained on three robotic hands (Shadow, Allegro, Inspire).
A Shared-Autonomy Construction Robotic System for Overhead Works
Nov 12, 2025We present the ongoing development of a robotic system for overhead work such as ceiling drilling. The hardware platform comprises a mobile base with a two-stage lift, on which a bimanual torso is mounted with a custom-designed drilling end effector and RGB-D cameras. To support teleoperation in dynamic environments with limited visibility, we use Gaussian splatting for online 3D reconstruction and introduce motion parameters to model moving objects. For safe operation around dynamic obstacles, we developed a neural configuration-space barrier approach for planning and control. Initial feasibility studies demonstrate the capability of the hardware in drilling, bolting, and anchoring, and the software in safe teleoperation in a dynamic environment.
Neural Configuration-Space Barriers for Manipulation Planning and Control
Mar 06, 2025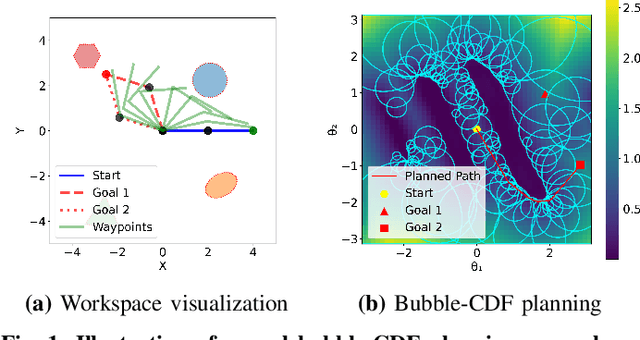
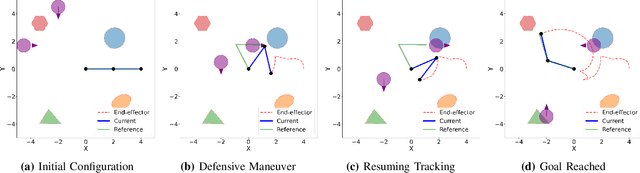
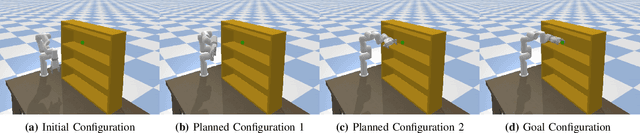
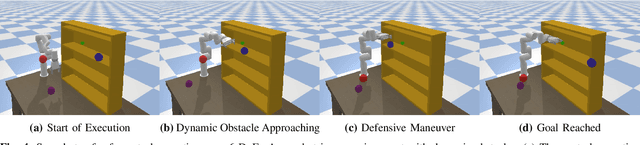
Planning and control for high-dimensional robot manipulators in cluttered, dynamic environments require both computational efficiency and robust safety guarantees. Inspired by recent advances in learning configuration-space distance functions (CDFs) as robot body representations, we propose a unified framework for motion planning and control that formulates safety constraints as CDF barriers. A CDF barrier approximates the local free configuration space, substantially reducing the number of collision-checking operations during motion planning. However, learning a CDF barrier with a neural network and relying on online sensor observations introduce uncertainties that must be considered during control synthesis. To address this, we develop a distributionally robust CDF barrier formulation for control that explicitly accounts for modeling errors and sensor noise without assuming a known underlying distribution. Simulations and hardware experiments on a 6-DoF xArm manipulator show that our neural CDF barrier formulation enables efficient planning and robust real-time safe control in cluttered and dynamic environments, relying only on onboard point-cloud observations.