 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangling the Causes of Plasticity Loss in Neural Networks
Feb 29, 2024Underpinning the past decades of work on the design, initialization, and optimization of neural networks is a seemingly innocuous assumption: that the network is trained on a \textit{stationary} data distribution. In settings where this assumption is violated, e.g.\ deep reinforcement learning, learning algorithms become unstable and brittle with respect to hyperparameters and even random seeds. One factor driving this instability is the loss of plasticity, meaning that updating the network's predictions in response to new information becomes more difficult as training progresses. While many recent works provide analyses and partial solutions to this phenomenon, a fundamental question remains unanswered: to what extent do known mechanisms of plasticity loss overlap, and how can mitigation strategies be combined to best maintain the trainability of a network? This paper addresses these questions, showing that loss of plasticity can be decomposed into multiple independent mechanisms and that, while intervening on any single mechanism is insufficient to avoid the loss of plasticity in all cases, intervening on multiple mechanisms in conjunction results in highly robust learning algorithms. We show that a combination of layer normalization and weight decay is highly effective at maintaining plasticity in a variety of synthetic nonstationary learning tasks, and further demonstrate its effectiveness on naturally arising nonstationarities, including reinforcement learning in the Arcade Learning Environment.
Toward Human-AI Alignment in Large-Scale Multi-Player Games
Feb 05, 2024



Achieving human-AI alignment in complex multi-agent games is crucial for creating trustworthy AI agents that enhance gameplay. We propose a method to evaluate this alignment using an interpretable task-sets framework, focusing on high-level behavioral tasks instead of low-level policies. Our approach has three components. First, we analyze extensive human gameplay data from Xbox's Bleeding Edge (100K+ games), uncovering behavioral patterns in a complex task space. This task space serves as a basis set for a behavior manifold capturing interpretable axes: fight-flight, explore-exploit, and solo-multi-agent. Second, we train an AI agent to play Bleeding Edge using a Generative Pretrained Causal Transformer and measure its behavior. Third, we project human and AI gameplay to the proposed behavior manifold to compare and contrast. This allows us to interpret differences in policy as higher-level behavioral concepts, e.g., we find that while human players exhibit variability in fight-flight and explore-exploit behavior, AI players tend towards uniformity. Furthermore, AI agents predominantly engage in solo play, while humans often engage in cooperative and competitive multi-agent patterns. These stark differences underscore the need for interpretable evaluation, design, and integration of AI in human-aligned applications. Our study advances the alignment discussion in AI and especially generative AI research, offering a measurable framework for interpretable human-agent alignment in multiplayer gaming.
Forecaster: Towards Temporally Abstract Tree-Search Planning from Pixels
Oct 16, 2023The ability to plan at many different levels of abstraction enables agents to envision the long-term repercussions of their decisions and thus enables sample-efficient learning. This becomes particularly beneficial in complex environments from high-dimensional state space such as pixels, where the goal is distant and the reward sparse. We introduce Forecaster, a deep hierarchical reinforcement learning approach which plans over high-level goals leveraging a temporally abstract world model. Forecaster learns an abstract model of its environment by modelling the transitions dynamics at an abstract level and training a world model on such transition. It then uses this world model to choose optimal high-level goals through a tree-search planning procedure. It additionally trains a low-level policy that learns to reach those goals. Our method not only captures building world models with longer horizons, but also, planning with such models in downstream tasks. We empirically demonstrate Forecaster's potential in both single-task learning and generalization to new tasks in the AntMaze domain.
Discovering Object-Centric Generalized Value Functions From Pixels
Apr 27, 2023



Deep Reinforcement Learning has shown significant progress in extracting useful representations from high-dimensional inputs albeit using hand-crafted auxiliary tasks and pseudo rewards. Automatically learning such representations in an object-centric manner geared towards control and fast adaptation remains an open research problem. In this paper, we introduce a method that tries to discover meaningful features from objects, translating them to temporally coherent "question" functions and leveraging the subsequent learned general value functions for control. We compare our approach with state-of-the-art techniques alongside other ablations and show competitive performance in both stationary and non-stationary settings. Finally, we also investigate the discovered general value functions and through qualitative analysis show that the learned representations are not only interpretable but also, centered around objects that are invariant to changes across tasks facilitating fast adaptation.
POMRL: No-Regret Learning-to-Plan with Increasing Horizons
Dec 30, 2022We study the problem of planning under model uncertainty in an online meta-reinforcement learning (RL) setting where an agent is presented with a sequence of related tasks with limited interactions per task. The agent can use its experience in each task and across tasks to estimate both the transition model and the distribution over tasks. We propose an algorithm to meta-learn the underlying structure across tasks, utilize it to plan in each task, and upper-bound the regret of the planning loss. Our bound suggests that the average regret over tasks decreases as the number of tasks increases and as the tasks are more similar. In the classical single-task setting, it is known that the planning horizon should depend on the estimated model's accuracy, that is, on the number of samples within task. We generalize this finding to meta-RL and study this dependence of planning horizons on the number of tasks. Based on our theoretical findings, we derive heuristics for selecting slowly increasing discount factors, and we validate its significance empirically.
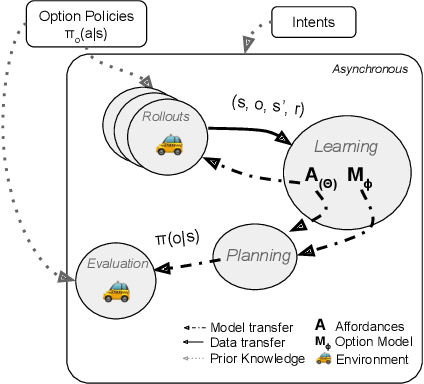
The Paradox of Choice: Using Attention in Hierarchical Reinforcement Learning
Jan 24, 2022



Decision-making AI agents are often faced with two important challenges: the depth of the planning horizon, and the branching factor due to having many choices. Hierarchical reinforcement learning methods aim to solve the first problem, by providing shortcuts that skip over multiple time steps. To cope with the breadth, it is desirable to restrict the agent's attention at each step to a reasonable number of possible choices. The concept of affordances (Gibson, 1977) suggests that only certain actions are feasible in certain states. In this work, we model "affordances" through an attention mechanism that limits the available choices of temporally extended options. We present an online, model-free algorithm to learn affordances that can be used to further learn subgoal options. We investigate the role of hard versus soft attention in training data collection, abstract value learning in long-horizon tasks, and handling a growing number of choices. We identify and empirically illustrate the settings in which the paradox of choice arises, i.e. when having fewer but more meaningful choices improves the learning speed and performance of a reinforcement learning agent.
Temporally Abstract Partial Models
Aug 06, 2021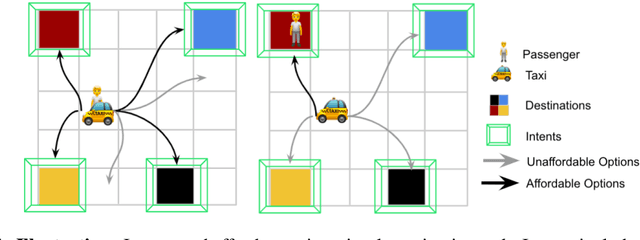

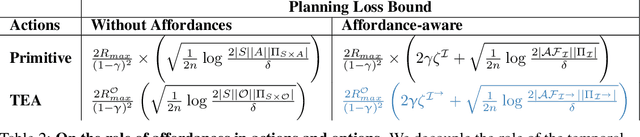
Humans and animals have the ability to reason and make predictions about different courses of action at many time scales. In reinforcement learning, option models (Sutton, Precup \& Singh, 1999; Precup, 2000) provide the framework for this kind of temporally abstract prediction and reasoning. Natural intelligent agents are also able to focus their attention on courses of action that are relevant or feasible in a given situation, sometimes termed affordable actions. In this paper, we define a notion of affordances for options, and develop temporally abstract partial option models, that take into account the fact that an option might be affordable only in certain situations. We analyze the trade-offs between estimation and approximation error in planning and learning when using such models, and identify some interesting special cases. Additionally, we demonstrate empirically the potential impact of partial option models on the efficiency of planning.
Sequoia: A Software Framework to Unify Continual Learning Research
Aug 03, 2021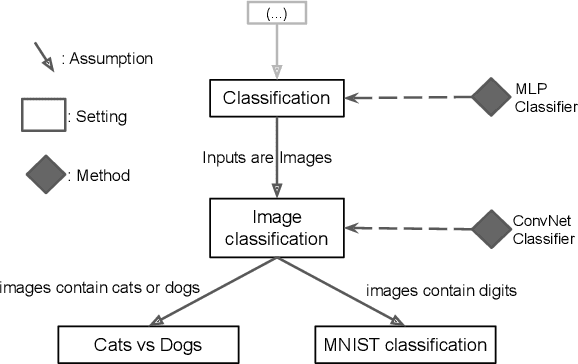
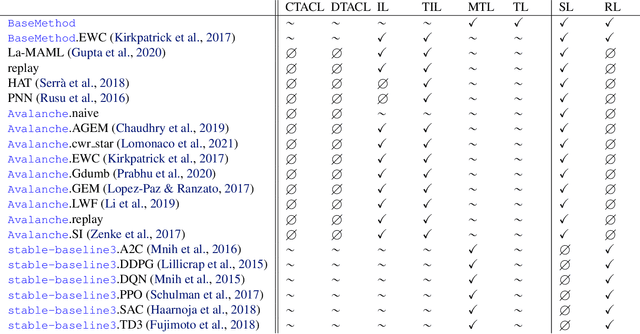
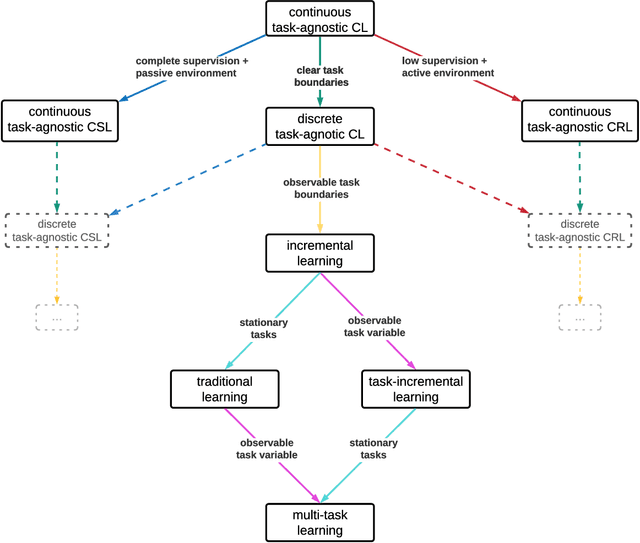
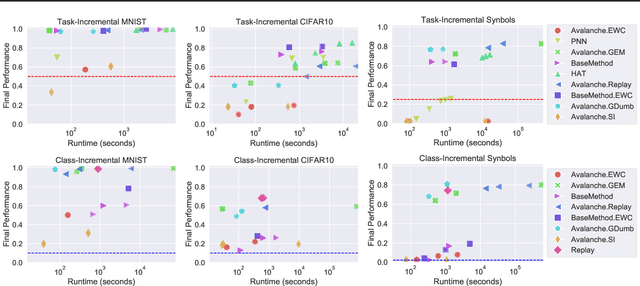
The field of Continual Learning (CL) seeks to develop algorithms that accumulate knowledge and skills over time through interaction with non-stationary environments and data distributions. Measuring progress in CL can be difficult because a plethora of evaluation procedures (ettings) and algorithmic solutions (methods) have emerged, each with their own potentially disjoint set of assumptions about the CL problem. In this work, we view each setting as a set of assumptions. We then create a tree-shaped hierarchy of the research settings in CL, in which more general settings become the parents of those with more restrictive assumptions. This makes it possible to use inheritance to share and reuse research, as developing a method for a given setting also makes it directly applicable onto any of its children. We instantiate this idea as a publicly available software framework called Sequoia, which features a variety of settings from both the Continual Supervised Learning (CSL) and Continual Reinforcement Learning (CRL) domains. Sequoia also includes a growing suite of methods which are easy to extend and customize, in addition to more specialized methods from third-party libraries. We hope that this new paradigm and its first implementation can serve as a foundation for the unification and acceleration of research in CL. You can help us grow the tree by visiting www.github.com/lebrice/Sequoia.
Variance Penalized On-Policy and Off-Policy Actor-Critic
Feb 03, 2021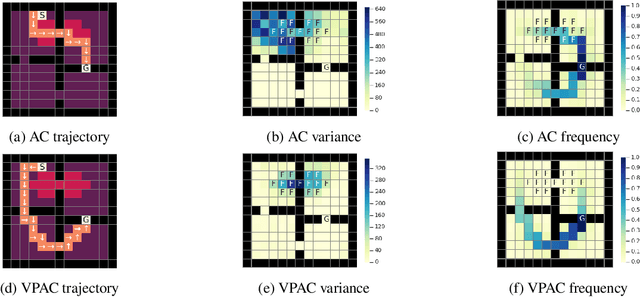
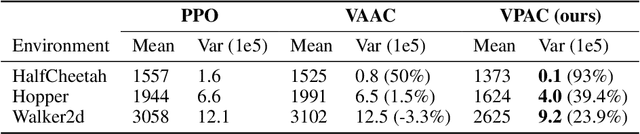
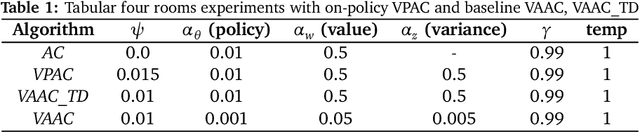
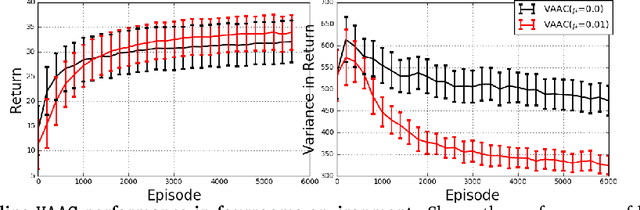
Reinforcement learning algorithms are typically geared towards optimizing the expected return of an agent. However, in many practical applications, low variance in the return is desired to ensure the reliability of an algorithm. In this paper, we propose on-policy and off-policy actor-critic algorithms that optimize a performance criterion involving both mean and variance in the return. Previous work uses the second moment of return to estimate the variance indirectly. Instead, we use a much simpler recently proposed direct variance estimator which updates the estimates incrementally using temporal difference methods. Using the variance-penalized criterion, we guarantee the convergence of our algorithm to locally optimal policies for finite state action Markov decision processes. We demonstrate the utility of our algorithm in tabular and continuous MuJoCo domains. Our approach not only performs on par with actor-critic and prior variance-penalization baselines in terms of expected return, but also generates trajectories which have lower variance in the return.
Towards Continual Reinforcement Learning: A Review and Perspectives
Dec 25, 2020
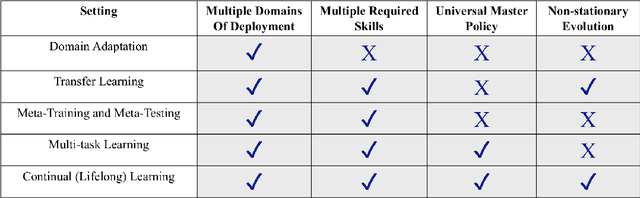
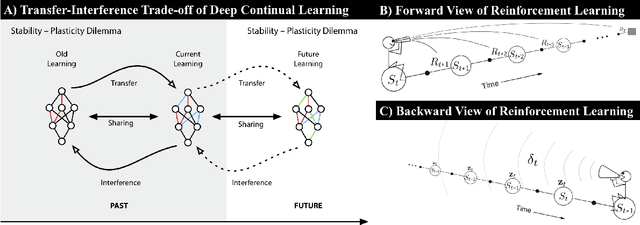
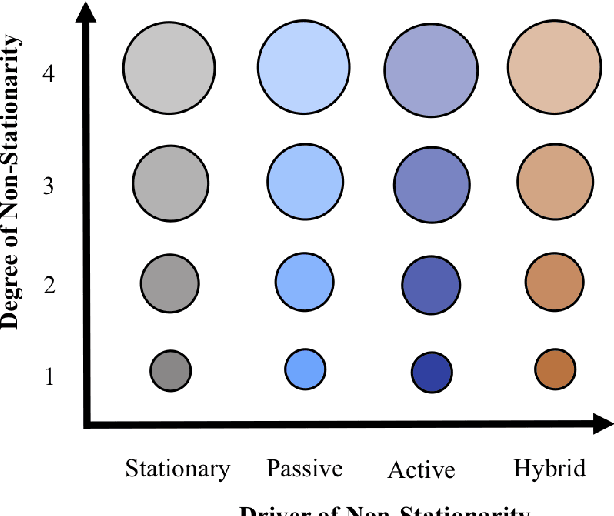
In this article, we aim to provide a literature review of different formulations and approaches to continual reinforcement learning (RL), also known as lifelong or non-stationary RL. We begin by discussing our perspective on why RL is a natural fit for studying continual learning. We then provide a taxonomy of different continual RL formulations and mathematically characterize the non-stationary dynamics of each setting. We go on to discuss evaluation of continual RL agents, providing an overview of benchmarks used in the literature and important metrics for understanding agent performance. Finally, we highlight open problems and challenges in bridging the gap between the current state of continual RL and findings in neuroscience. While still in its early days, the study of continual RL has the promise to develop better incremental reinforcement learners that can function in increasingly realistic applications where non-stationarity plays a vital role. These include applications such as those in the fields of healthcare, education, logistics, and robotics.