 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCosFly: Plan in the Matrix, Fly in the World
May 18, 2026We present CosFly, a box-structured planning and multimodal simulation pipeline for aerial tracking, together with CosFly-Track, a large-scale UAV dataset for dynamic target tracking across diverse environments including urban centers, highways, rural landscapes, forests, and coastal towns. In our current implementation on CARLA, CosFly provides a modular 7-step construction pipeline that converts complex 3D worlds into structured obstacle representations for planning, then projects the resulting trajectories back into multi-modal sensor data -- including RGB images, high-precision depth maps, and semantic segmentation masks -- paired with natural language navigation instructions. A key feature is the support for configurable fixed-FOV zoom levels (one FOV setting drawn per trajectory and held constant throughout), enabling simulation of various focal lengths through camera-intrinsic adjustments. The pipeline covers the complete workflow from 3D map export through grid simplification, pedestrian and drone trajectory planning, multi-modal rendering with 6-DOF pose annotations, quality inspection, and teacher-student caption generation. We analyze two trajectory-planning paradigms for aerial target tracking: a conventional two-stage pipeline with front-end candidate generation and backend refinement, and a direct gradient-based formulation that optimizes multiple tracking constraints in a single objective. The public CosFly-Track release contains 250 validated trajectories and approximately 100,000 rendered images with complete 6-DOF drone pose annotations (position x, y, z and orientation yaw, pitch, roll). Together, the pipeline and dataset establish a scalable foundation for aerial-ground collaborative research, supporting dynamic target tracking, UAV navigation, and multi-modal perception across diverse environments.
Vision-and-Language Navigation for UAVs: Progress, Challenges, and a Research Roadmap
Apr 15, 2026Vision-and-Language Navigation for Unmanned Aerial Vehicles (UAV-VLN) represents a pivotal challenge in embodied artificial intelligence, focused on enabling UAVs to interpret high-level human commands and execute long-horizon tasks in complex 3D environments. This paper provides a comprehensive and structured survey of the field, from its formal task definition to the current state of the art. We establish a methodological taxonomy that charts the technological evolution from early modular and deep learning approaches to contemporary agentic systems driven by large foundation models, including Vision-Language Models (VLMs), Vision-Language-Action (VLA) models, and the emerging integration of generative world models with VLA architectures for physically-grounded reasoning. The survey systematically reviews the ecosystem of essential resources simulators, datasets, and evaluation metrics that facilitates standardized research. Furthermore, we conduct a critical analysis of the primary challenges impeding real-world deployment: the simulation-to-reality gap, robust perception in dynamic outdoor settings, reasoning with linguistic ambiguity, and the efficient deployment of large models on resource-constrained hardware. By synthesizing current benchmarks and limitations, this survey concludes by proposing a forward-looking research roadmap to guide future inquiry into key frontiers such as multi-agent swarm coordination and air-ground collaborative robotics.
UniPCGC: Towards Practical Point Cloud Geometry Compression via an Efficient Unified Approach
Mar 24, 2025Learning-based point cloud compression methods have made significant progress in terms of performance. However, these methods still encounter challenges including high complexity, limited compression modes, and a lack of support for variable rate, which restrict the practical application of these methods. In order to promote the development of practical point cloud compression, we propose an efficient unified point cloud geometry compression framework, dubbed as UniPCGC. It is a lightweight framework that supports lossy compression, lossless compression, variable rate and variable complexity. First, we introduce the Uneven 8-Stage Lossless Coder (UELC) in the lossless mode, which allocates more computational complexity to groups with higher coding difficulty, and merges groups with lower coding difficulty. Second, Variable Rate and Complexity Module (VRCM) is achieved in the lossy mode through joint adoption of a rate modulation module and dynamic sparse convolution. Finally, through the dynamic combination of UELC and VRCM, we achieve lossy compression, lossless compression, variable rate and complexity within a unified framework. Compared to the previous state-of-the-art method, our method achieves a compression ratio (CR) gain of 8.1\% on lossless compression, and a Bjontegaard Delta Rate (BD-Rate) gain of 14.02\% on lossy compression, while also supporting variable rate and variable complexity.
Accurate 3D Localization for MAV Swarms by UWB and IMU Fusion
Jul 28, 2018
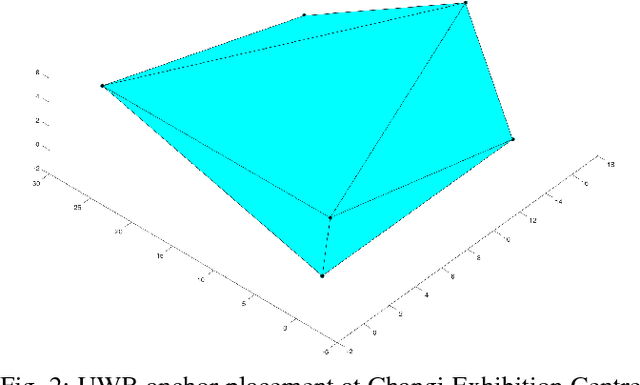
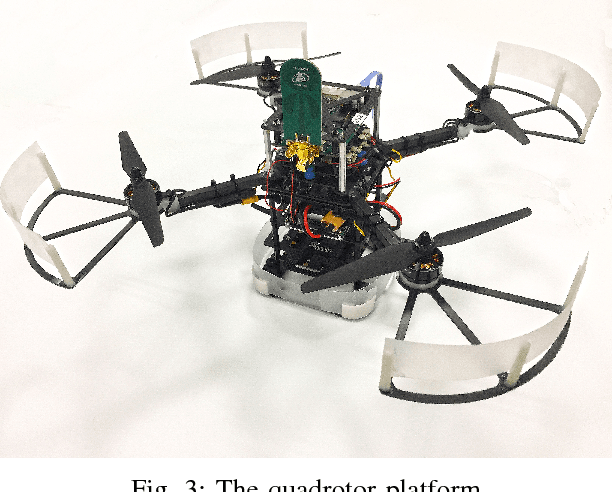
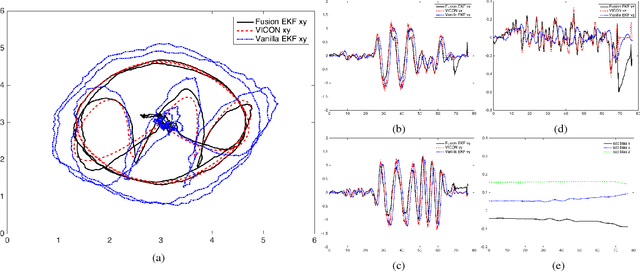
Driven by applications like Micro Aerial Vehicles (MAVs), driver-less cars, etc, localization solution has become an active research topic in the past decade. In recent years, Ultra Wideband (UWB) emerged as a promising technology because of its impressive performance in both indoor and outdoor positioning. But algorithms relying only on UWB sensor usually result in high latency and low bandwidth, which is undesirable in some situations such as controlling a MAV. To alleviate this problem, an Extended Kalman Filter (EKF) based algorithm is proposed to fuse the Inertial Measurement Unit (IMU) and UWB, which achieved 80Hz 3D localization with significantly improved accuracy and almost no delay. To verify the effectiveness and reliability of the proposed approach, a swarm of 6 MAVs is set up to perform a light show in an indoor exhibition hall. Video and source codes are available at https://github.com/lijx10/uwb-localization