 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Roughness Estimation via Fusion of Standard Onboard Automotive Sensors
Jul 16, 2025



Road roughness significantly affects vehicle vibrations and ride quality. We introduce a Kalman filter (KF)-based method for estimating road roughness in terms of the international roughness index (IRI) by fusing inertial and speed measurements, offering a cost-effective solution for pavement monitoring. The method involves system identification on a physical vehicle to estimate realistic model parameters, followed by KF-based reconstruction of the longitudinal road profile to compute IRI values. It explores IRI estimation using vertical and lateral vibrations, the latter more common in modern vehicles. Validation on 230 km of real-world data shows promising results, with IRI estimation errors ranging from 1% to 10% of the reference values. However, accuracy deteriorates significantly when using only lateral vibrations, highlighting their limitations. These findings demonstrate the potential of KF-based estimation for efficient road roughness monitoring.
Federated Learning for Traffic Flow Prediction with Synthetic Data Augmentation
Dec 11, 2024



Deep-learning based traffic prediction models require vast amounts of data to learn embedded spatial and temporal dependencies. The inherent privacy and commercial sensitivity of such data has encouraged a shift towards decentralised data-driven methods, such as Federated Learning (FL). Under a traditional Machine Learning paradigm, traffic flow prediction models can capture spatial and temporal relationships within centralised data. In reality, traffic data is likely distributed across separate data silos owned by multiple stakeholders. In this work, a cross-silo FL setting is motivated to facilitate stakeholder collaboration for optimal traffic flow prediction applications. This work introduces an FL framework, referred to as FedTPS, to generate synthetic data to augment each client's local dataset by training a diffusion-based trajectory generation model through FL. The proposed framework is evaluated on a large-scale real world ride-sharing dataset using various FL methods and Traffic Flow Prediction models, including a novel prediction model we introduce, which leverages Temporal and Graph Attention mechanisms to learn the Spatio-Temporal dependencies embedded within regional traffic flow data. Experimental results show that FedTPS outperforms multiple other FL baselines with respect to global model performance.
Superior Scoring Rules for Probabilistic Evaluation of Single-Label Multi-Class Classification Tasks
Jul 25, 2024



This study introduces novel superior scoring rules called Penalized Brier Score (PBS) and Penalized Logarithmic Loss (PLL) to improve model evaluation for probabilistic classification. Traditional scoring rules like Brier Score and Logarithmic Loss sometimes assign better scores to misclassifications in comparison with correct classifications. This discrepancy from the actual preference for rewarding correct classifications can lead to suboptimal model selection. By integrating penalties for misclassifications, PBS and PLL modify traditional proper scoring rules to consistently assign better scores to correct predictions. Formal proofs demonstrate that PBS and PLL satisfy strictly proper scoring rule properties while also preferentially rewarding accurate classifications. Experiments showcase the benefits of using PBS and PLL for model selection, model checkpointing, and early stopping. PBS exhibits a higher negative correlation with the F1 score compared to the Brier Score during training. Thus, PBS more effectively identifies optimal checkpoints and early stopping points, leading to improved F1 scores. Comparative analysis verifies models selected by PBS and PLL achieve superior F1 scores. Therefore, PBS and PLL address the gap between uncertainty quantification and accuracy maximization by encapsulating both proper scoring principles and explicit preference for true classifications. The proposed metrics can enhance model evaluation and selection for reliable probabilistic classification.
DeepTIO: A Deep Thermal-Inertial Odometry with Visual Hallucination
Sep 16, 2019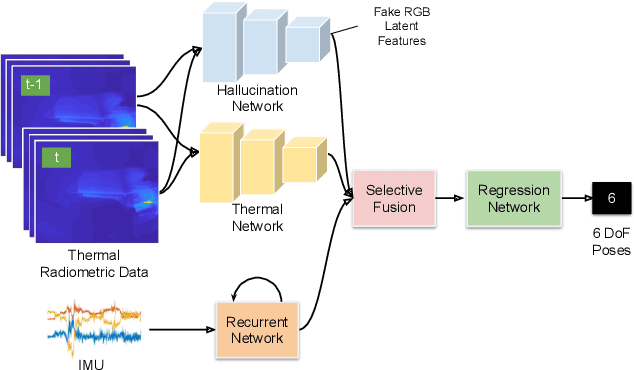
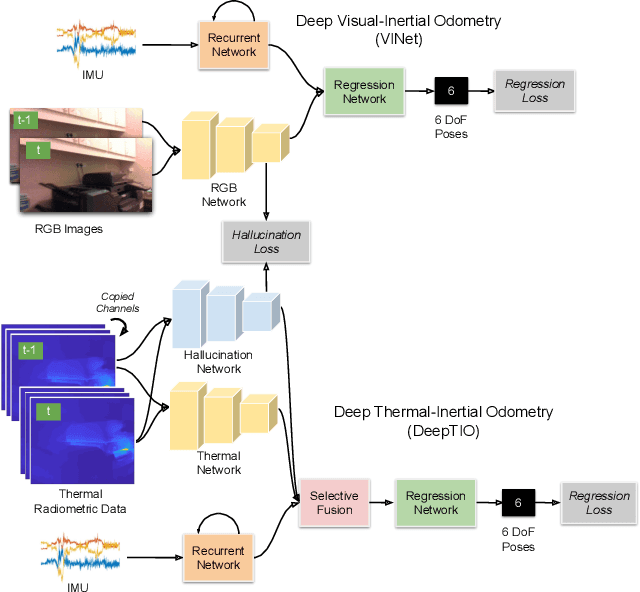
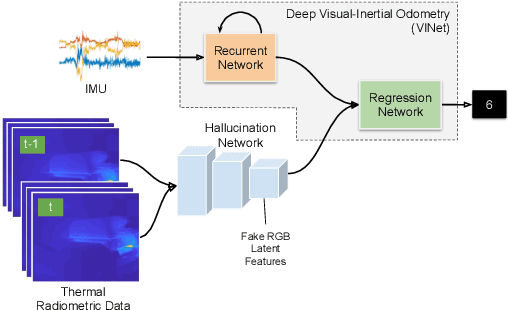
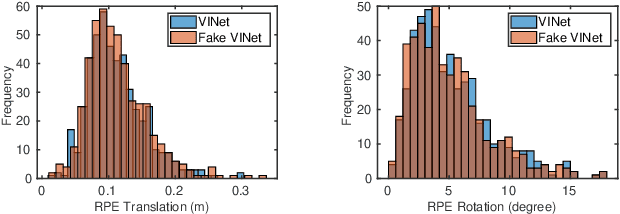
Visual odometry shows excellent performance in a wide range of environments. However, in visually-denied scenarios (e.g. heavy smoke or darkness), pose estimates degrade or even fail. Thermal imaging cameras are commonly used for perception and inspection when the environment has low visibility. However, their use in odometry estimation is hampered by the lack of robust visual features. In part, this is as a result of the sensor measuring the ambient temperature profile rather than scene appearance and geometry. To overcome these issues, we propose a Deep Neural Network model for thermal-inertial odometry (DeepTIO) by incorporating a visual hallucination network to provide the thermal network with complementary information. The hallucination network is taught to predict fake visual features from thermal images by using the robust Huber loss. We also employ selective fusion to attentively fuse the features from three different modalities, i.e thermal, hallucination, and inertial features. Extensive experiments are performed in our large scale hand-held data in benign and smoke-filled environments, showing the efficacy of the proposed model.