 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuiding Monocular Depth Estimation Using Depth-Attention Volume
Apr 06, 2020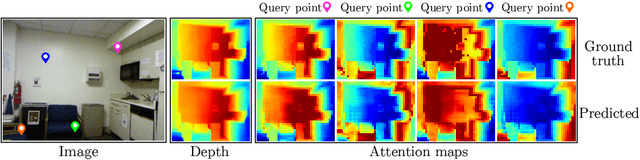
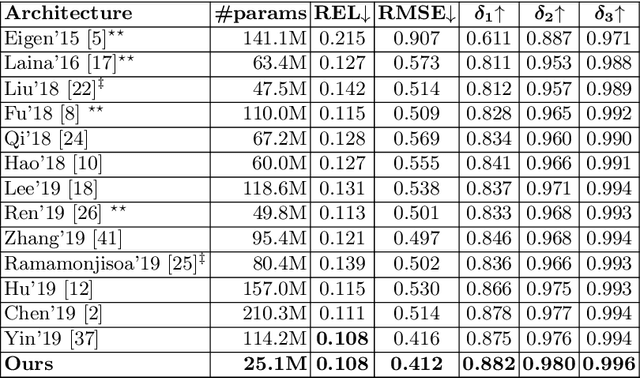
Recovering the scene depth from a single image is an ill-posed problem that requires additional priors, often referred to as monocular depth cues, to disambiguate different 3D interpretations. In recent works, those priors have been learned in an end-to-end manner from large datasets by using deep neural networks. In this paper, we propose guiding depth estimation to favor planar structures that are ubiquitous especially in indoor environments. This is achieved by incorporating a non-local coplanarity constraint to the network with a novel attention mechanism called depth-attention volume (DAV). Experiments on two popular indoor datasets, namely NYU-Depth-v2 and ScanNet, show that our method achieves state-of-the-art depth estimation results while using only a fraction of the number of parameters needed by the competing methods.
EPOS: Estimating 6D Pose of Objects with Symmetries
Apr 01, 2020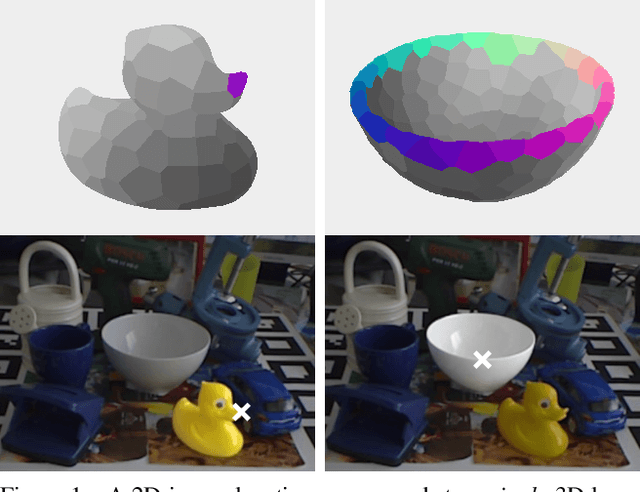
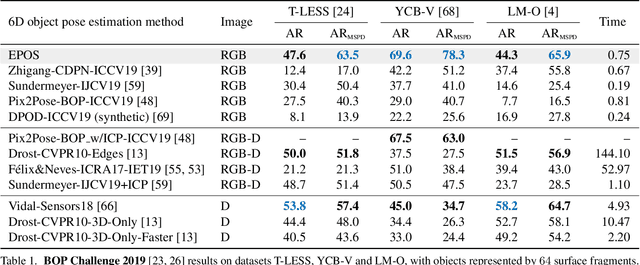
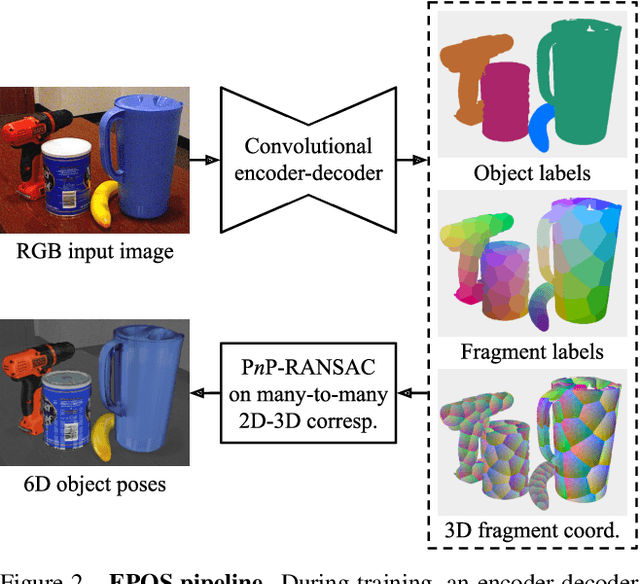
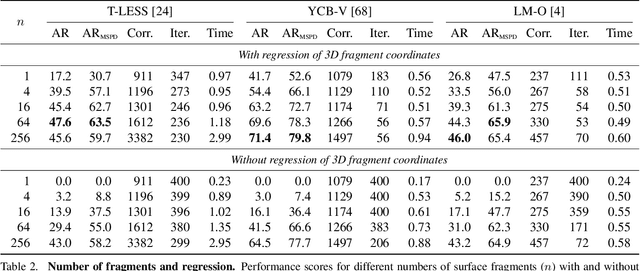
We present a new method for estimating the 6D pose of rigid objects with available 3D models from a single RGB input image. The method is applicable to a broad range of objects, including challenging ones with global or partial symmetries. An object is represented by compact surface fragments which allow handling symmetries in a systematic manner. Correspondences between densely sampled pixels and the fragments are predicted using an encoder-decoder network. At each pixel, the network predicts: (i) the probability of each object's presence, (ii) the probability of the fragments given the object's presence, and (iii) the precise 3D location on each fragment. A data-dependent number of corresponding 3D locations is selected per pixel, and poses of possibly multiple object instances are estimated using a robust and efficient variant of the PnP-RANSAC algorithm. In the BOP Challenge 2019, the method outperforms all RGB and most RGB-D and D methods on the T-LESS and LM-O datasets. On the YCB-V dataset, it is superior to all competitors, with a large margin over the second-best RGB method. Source code is at: cmp.felk.cvut.cz/epos.
A Benchmark for Temporal Color Constancy
Mar 08, 2020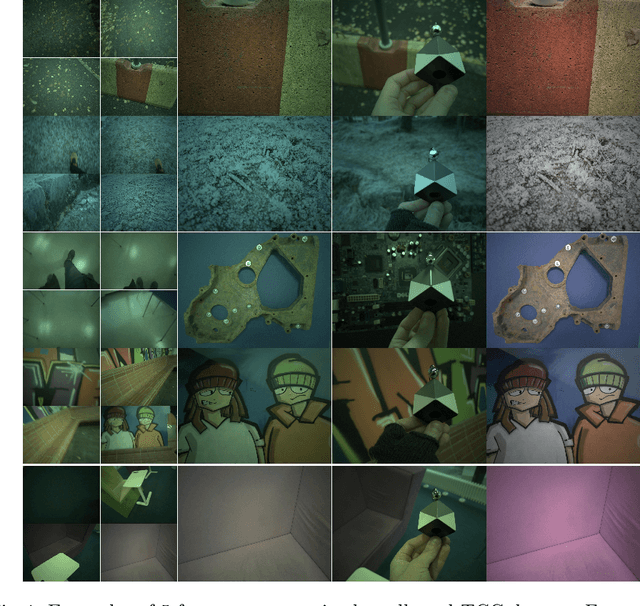
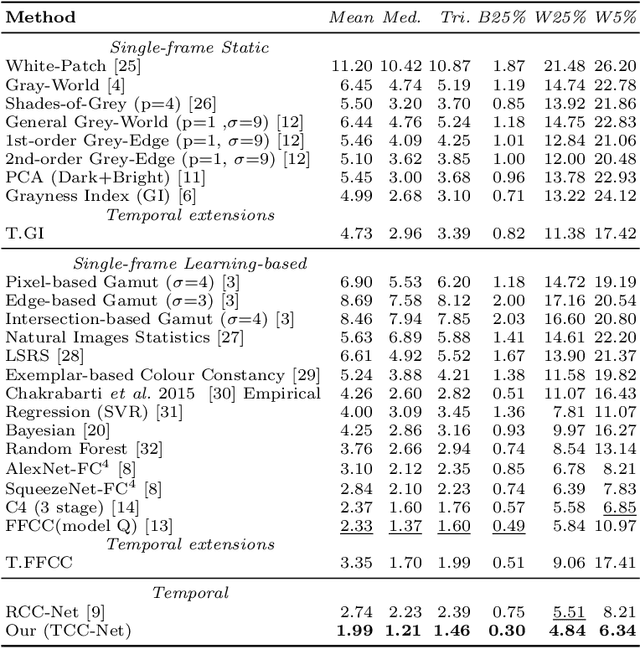
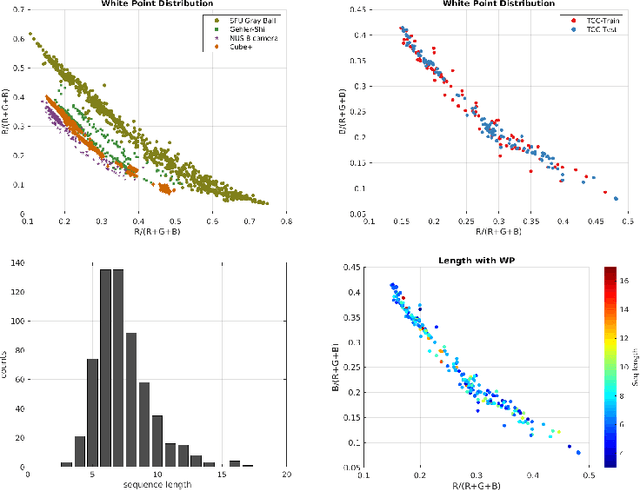
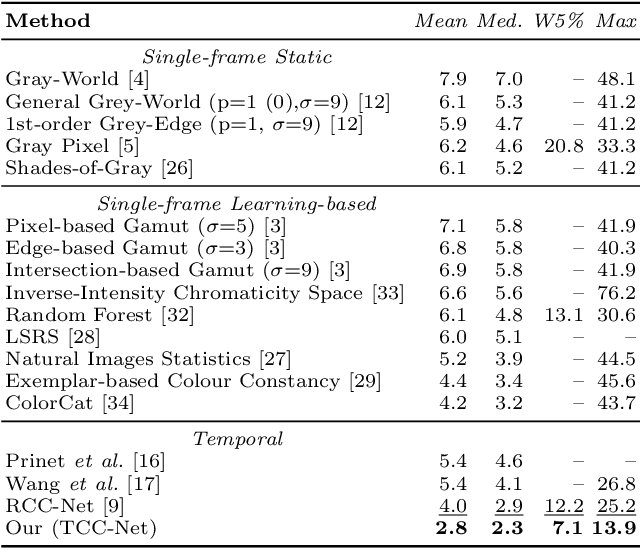
Temporal Color Constancy (CC) is a recently proposed approach that challenges the conventional single-frame color constancy. The conventional approach is to use a single frame - shot frame - to estimate the scene illumination color. In temporal CC, multiple frames from the view finder sequence are used to estimate the color. However, there are no realistic large scale temporal color constancy datasets for method evaluation. In this work, a new temporal CC benchmark is introduced. The benchmark comprises of (1) 600 real-world sequences recorded with a high-resolution mobile phone camera, (2) a fixed train-test split which ensures consistent evaluation, and (3) a baseline method which achieves high accuracy in the new benchmark and the dataset used in previous works. Results for more than 20 well-known color constancy methods including the recent state-of-the-arts are reported in our experiments.
Image Matching across Wide Baselines: From Paper to Practice
Mar 03, 2020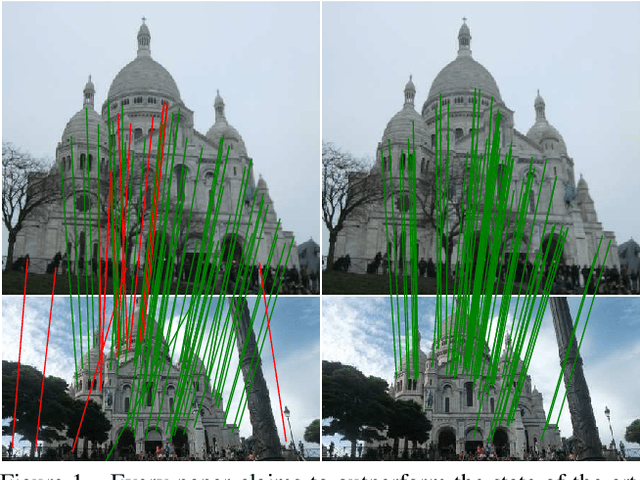
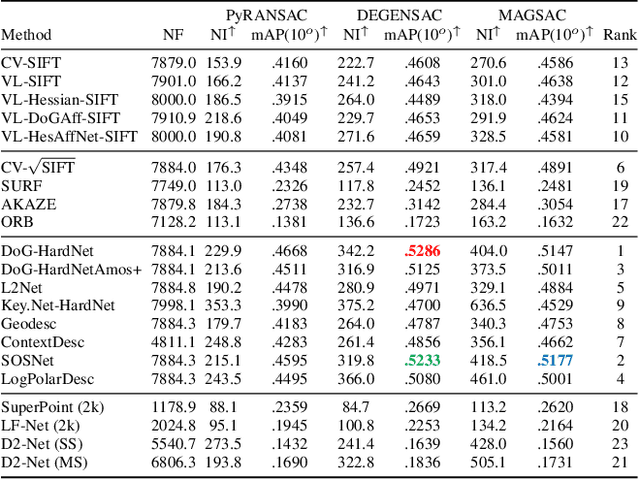
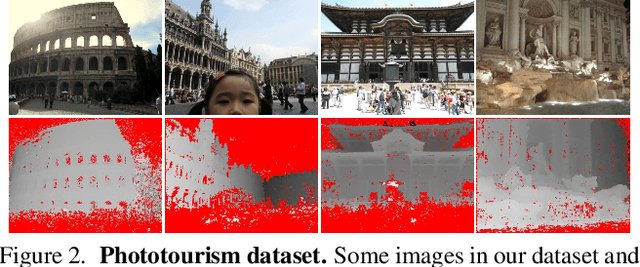
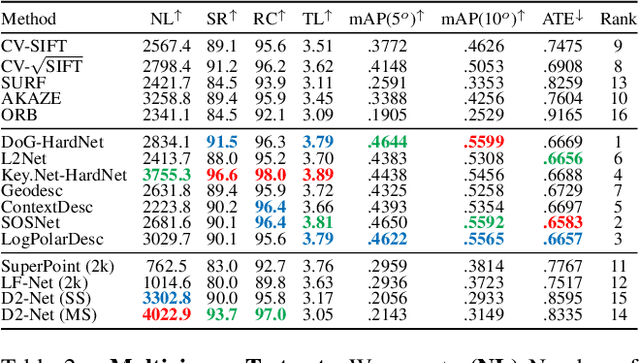
We introduce a comprehensive benchmark for local features and robust estimation algorithms, focusing on the downstream task -- the accuracy of the reconstructed camera pose -- as our primary metric. Our pipeline's modular structure allows us to easily integrate, configure, and combine methods and heuristics. We demonstrate this by embedding dozens of popular algorithms and evaluating them, from seminal works to the cutting edge of machine learning research. We show that with proper settings, classical solutions may still outperform the perceived state of the art. Besides establishing the actual state of the art, the experiments conducted in this paper reveal unexpected properties of SfM pipelines that can be exploited to help improve their performance, for both algorithmic and learned methods. Data and code are online https://github.com/vcg-uvic/image-matching-benchmark, providing an easy-to-use and flexible framework for the benchmarking of local feature and robust estimation methods, both alongside and against top-performing methods. This work provides the basis for an open challenge on wide-baseline image matching https://vision.uvic.ca/image-matching-challenge .
MAGSAC++, a fast, reliable and accurate robust estimator
Dec 11, 2019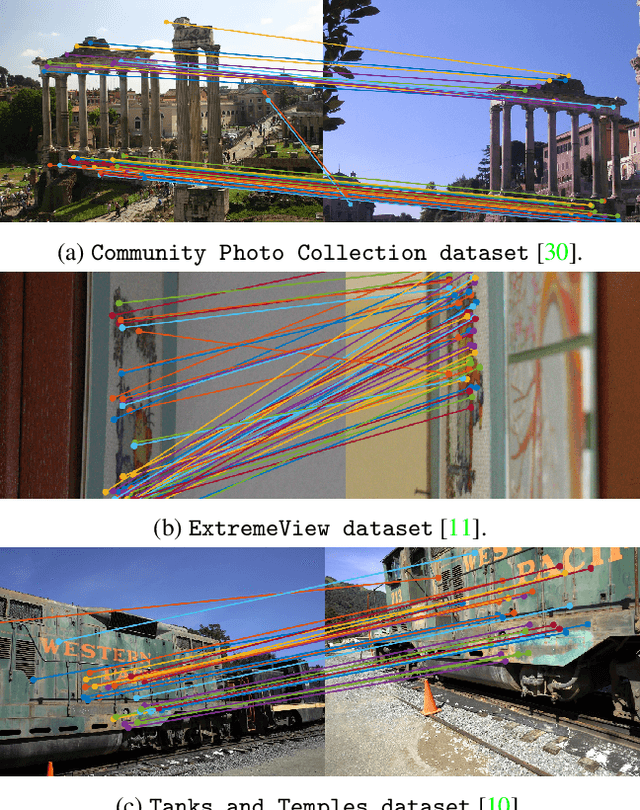
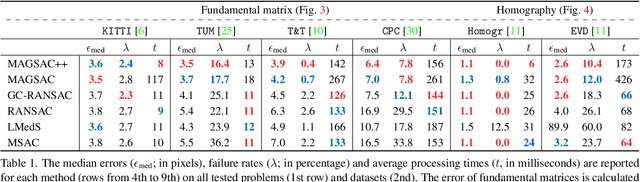
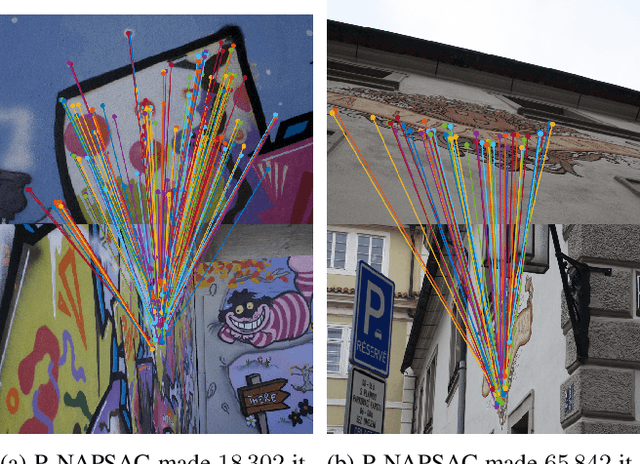
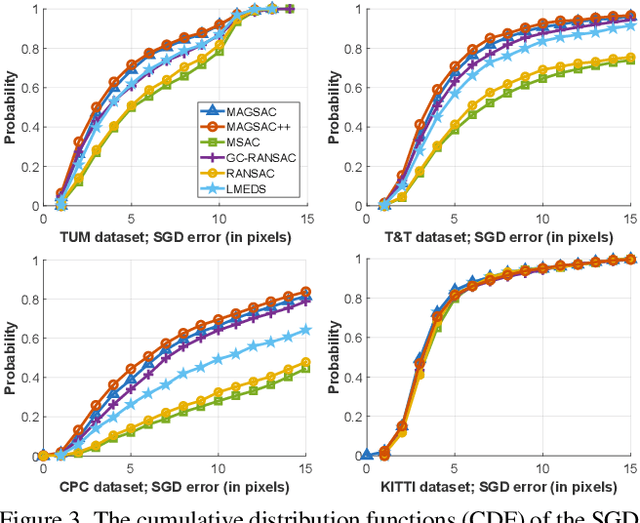
A new method for robust estimation, MAGSAC++, is proposed. It introduces a new model quality (scoring) function that does not require the inlier-outlier decision, and a novel marginalization procedure formulated as an iteratively re-weighted least-squares approach. We also propose a new sampler, Progressive NAPSAC, for RANSAC-like robust estimators. Exploiting the fact that nearby points often originate from the same model in real-world data, it finds local structures earlier than global samplers. The progressive transition from local to global sampling does not suffer from the weaknesses of purely localized samplers. On six publicly available real-world datasets for homography and fundamental matrix fitting, MAGSAC++ produces results superior to state-of-the-art robust methods. It is faster, more geometrically accurate and fails less often.
DAL -- A Deep Depth-aware Long-term Tracker
Dec 02, 2019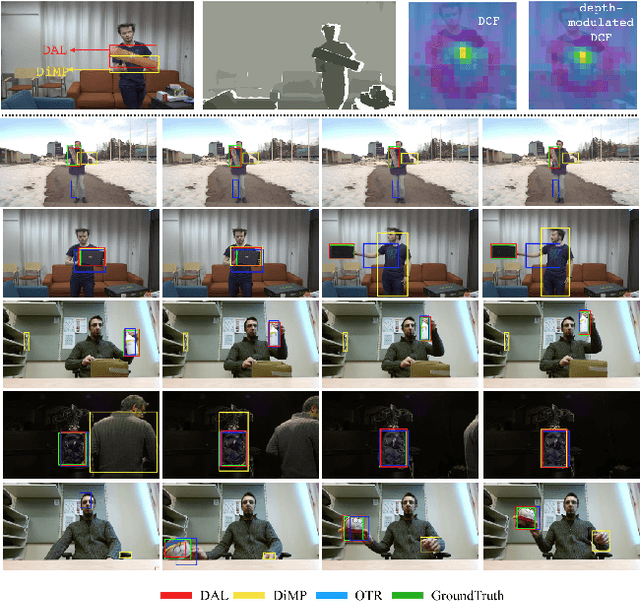
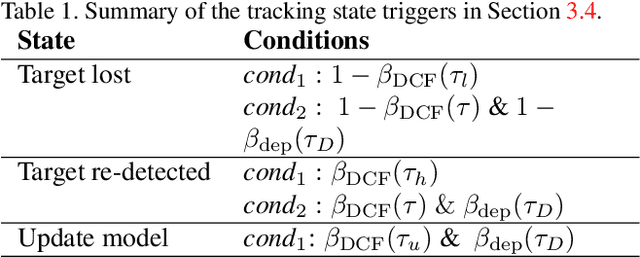
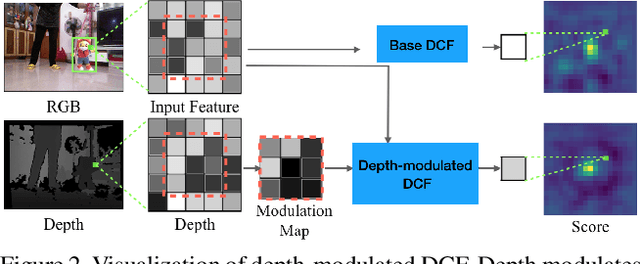
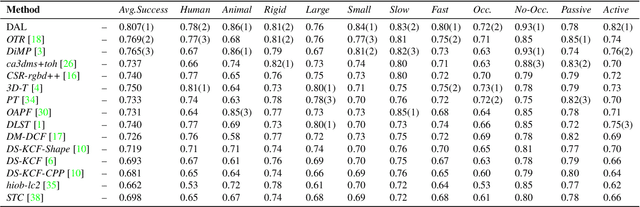
The best RGBD trackers provide high accuracy but are slow to run. On the other hand, the best RGB trackers are fast but clearly inferior on the RGBD datasets. In this work, we propose a deep depth-aware long-term tracker that achieves state-of-the-art RGBD tracking performance and is fast to run. We reformulate deep discriminative correlation filter (DCF) to embed the depth information into deep features. Moreover, the same depth-aware correlation filter is used for target re-detection. Comprehensive evaluations show that the proposed tracker achieves state-of-the-art performance on the Princeton RGBD, STC, and the newly-released CDTB benchmarks and runs 20 fps.
Sub-frame Appearance and 6D Pose Estimation of Fast Moving Objects
Nov 25, 2019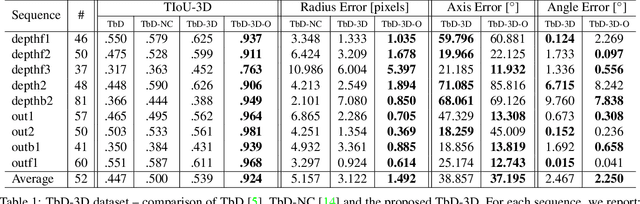
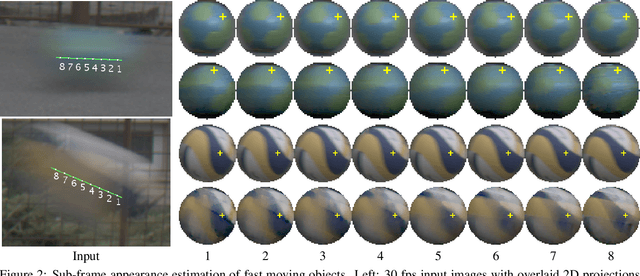
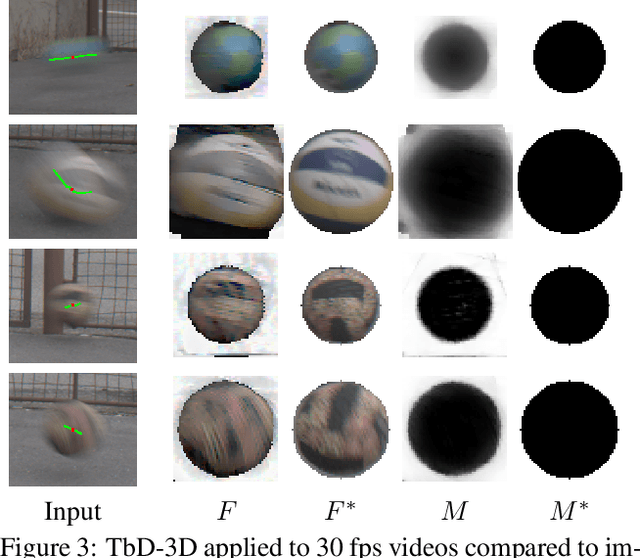
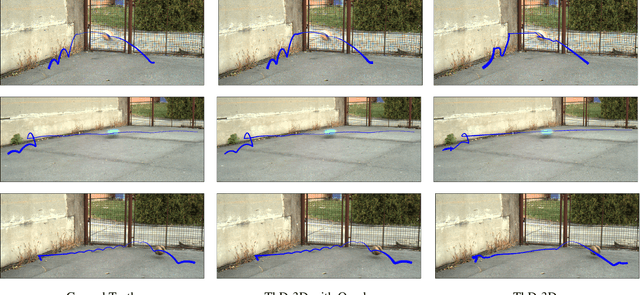
We propose a novel method that tracks fast moving objects, mainly non-uniform spherical, in full 6 degrees of freedom, estimating simultaneously their 3D motion trajectory, 3D pose and object appearance changes with a time step that is a fraction of the video frame exposure time. The sub-frame object localization and appearance estimation allows realistic temporal super-resolution and precise shape estimation. The method, called TbD-3D (Tracking by Deblatting in 3D) relies on a novel reconstruction algorithm which solves a piece-wise deblurring and matting problem. The 3D rotation is estimated by minimizing the reprojection error. As a second contribution, we present a new challenging dataset with fast moving objects that change their appearance and distance to the camera. High speed camera recordings with zero lag between frame exposures were used to generate videos with different frame rates annotated with ground-truth trajectory and pose.
ICDAR2019 Robust Reading Challenge on Multi-lingual Scene Text Detection and Recognition -- RRC-MLT-2019
Jul 01, 2019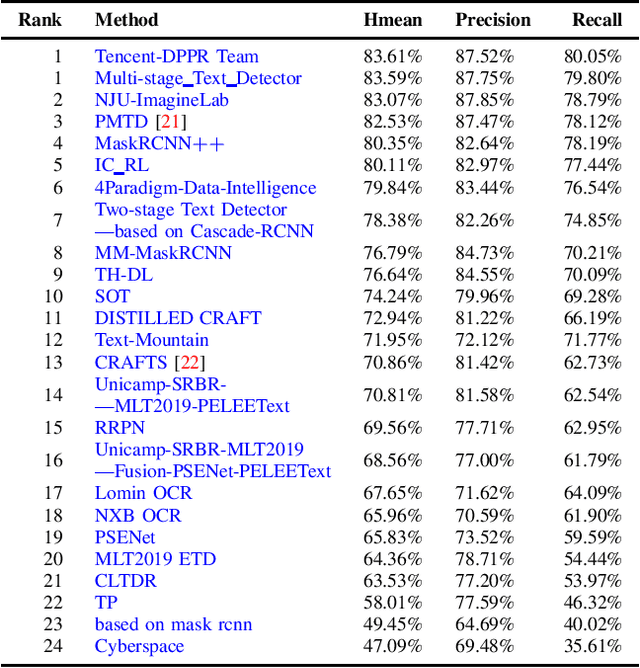
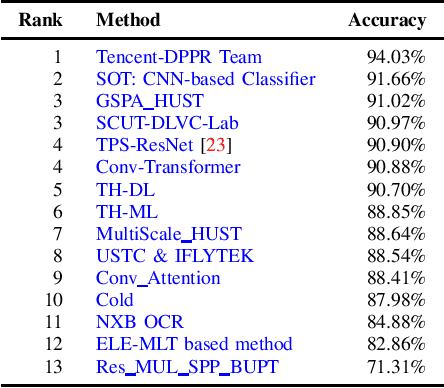
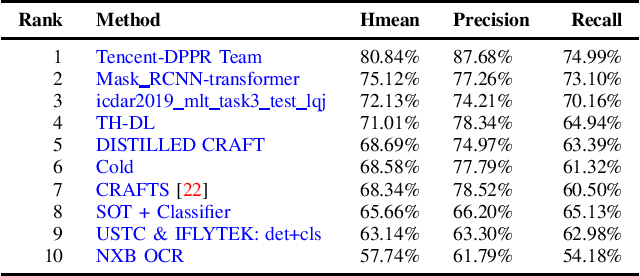
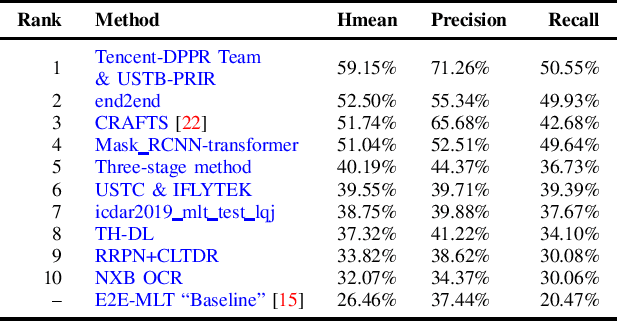
With the growing cosmopolitan culture of modern cities, the need of robust Multi-Lingual scene Text (MLT) detection and recognition systems has never been more immense. With the goal to systematically benchmark and push the state-of-the-art forward, the proposed competition builds on top of the RRC-MLT-2017 with an additional end-to-end task, an additional language in the real images dataset, a large scale multi-lingual synthetic dataset to assist the training, and a baseline End-to-End recognition method. The real dataset consists of 20,000 images containing text from 10 languages. The challenge has 4 tasks covering various aspects of multi-lingual scene text: (a) text detection, (b) cropped word script classification, (c) joint text detection and script classification and (d) end-to-end detection and recognition. In total, the competition received 60 submissions from the research and industrial communities. This paper presents the dataset, the tasks and the findings of the presented RRC-MLT-2019 challenge.
Progressive NAPSAC: sampling from gradually growing neighborhoods
Jun 05, 2019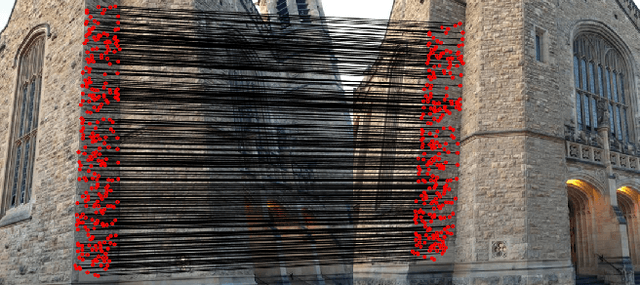
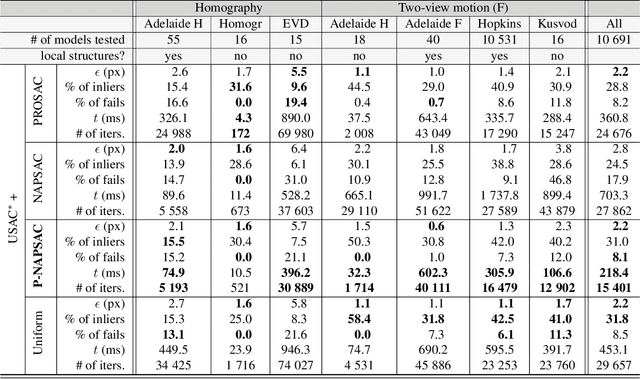
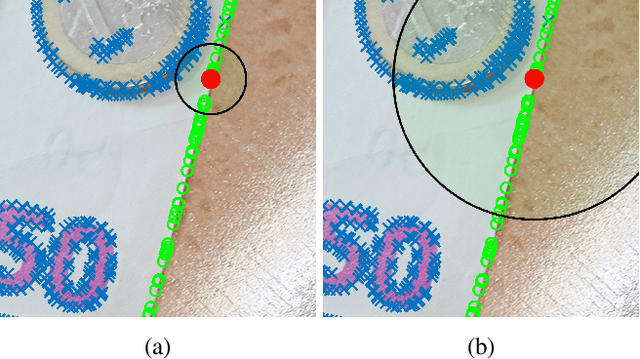
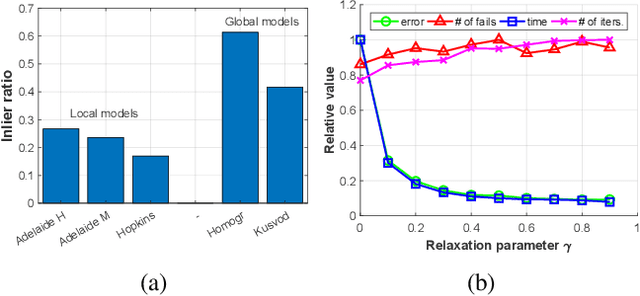
We propose Progressive NAPSAC, P-NAPSAC in short, which merges the advantages of local and global sampling by drawing samples from gradually growing neighborhoods. Exploiting the fact that nearby points are more likely to originate from the same geometric model, P-NAPSAC finds local structures earlier than global samplers. We show that the progressive spatial sampling in P-NAPSAC can be integrated with PROSAC sampling, which is applied to the first, location-defining, point. P-NAPSAC is embedded in USAC, a state-of-the-art robust estimation pipeline, which we further improve by implementing its local optimization as in Graph-Cut RANSAC. We call the resulting estimator USAC*. The method is tested on homography and fundamental matrix fitting on a total of 10,691 models from seven publicly available datasets. USAC* with P-NAPSAC outperforms reference methods in terms of speed on all problems.
Progressive-X: Efficient, Anytime, Multi-Model Fitting Algorithm
Jun 05, 2019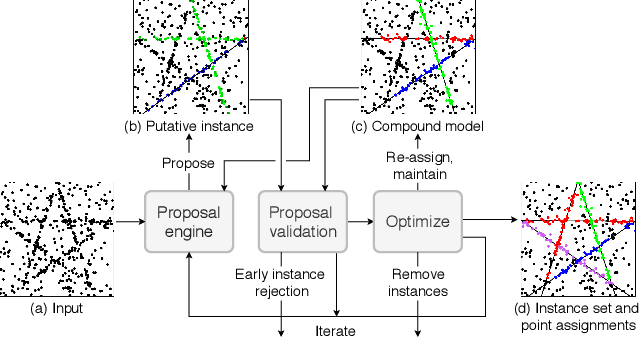
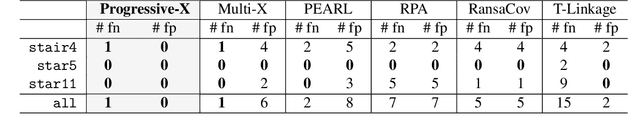
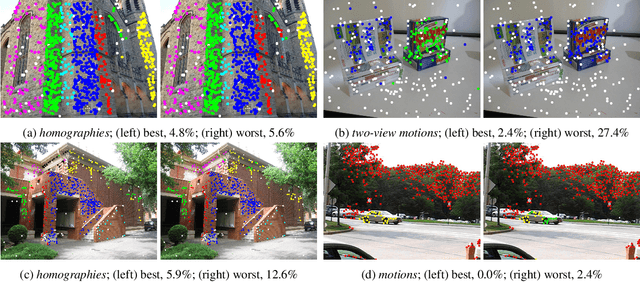
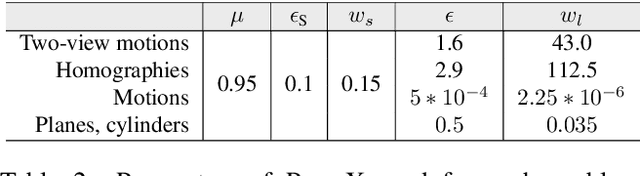
The Progressive-X algorithm, Prog-X in short, is proposed for geometric multi-model fitting. The method interleaves sampling and consolidation of the current data interpretation via repetitive hypothesis proposal, fast rejection, and integration of the new hypothesis into the kept instance set by labeling energy minimization. Due to exploring the data progressively, the method has several beneficial properties compared with the state-of-the-art. First, a clear criterion, adopted from RANSAC, controls the termination and stops the algorithm when the probability of finding a new model with a reasonable number of inliers falls below a threshold. Second, Prog-X is an any-time algorithm. Thus, whenever is interrupted, e.g. due to a time limit, the returned instances cover real and, likely, the most dominant ones. The method is superior to the state-of-the-art in terms of accuracy in both synthetic experiments and on publicly available real-world datasets for homography, two-view motion, and motion segmentation.