 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgents' Last Exam
Jun 03, 2026Recent AI systems have achieved strong results on a wide range of benchmarks, yet these gains have not translated into economically meaningful deployment across many professional domains. We argue that this gap is largely an evaluation problem: widely used benchmarks lack sustained performance measurement on real and economically valuable workflows. This paper introduces Agents' Last Exam (ALE), a benchmark designed to evaluate AI agents on long-horizon, economically valuable, real-world tasks with verifiable outcomes. Developed in collaboration with 250+ industry experts, ALE covers non-physical industries defined with reference to O*NET / SOC 2018 (the U.S. federal occupational taxonomy). It is organized around a task taxonomy with 55 subfields grouped into 13 industry clusters covering 1K+ tasks. Current results show that the hardest tier remains far from saturated: across mainstream harness and backbone configurations, the average full pass rate is 2.6%. ALE is designed as a living benchmark: its task pool grows continuously as new workflows and industries are onboarded. More broadly, ALE is intended not merely as another leaderboard, but as an instrument for closing the gap between benchmark success and GDP-relevant impact.
Discrete Stochastic Localization for Non-autoregressive Generation
Feb 18, 2026Non-autoregressive (NAR) generation reduces decoding latency by predicting many tokens in parallel, but iterative refinement often suffers from error accumulation and distribution shift under self-generated drafts. Masked diffusion language models (MDLMs) and their remasking samplers (e.g., ReMDM) can be viewed as modern NAR iterative refinement, where generation repeatedly revises a partially observed draft. In this work we show that \emph{training alone} can substantially improve the step-efficiency of MDLM/ReMDM sampling. We propose \textsc{DSL} (Discrete Stochastic Localization), which trains a single SNR-invariant denoiser across a continuum of corruption levels, bridging intermediate draft noise and mask-style endpoint corruption within one Diffusion Transformer. On OpenWebText, \textsc{DSL} fine-tuning yields large MAUVE gains at low step budgets, surpassing the MDLM+ReMDM baseline with \(\sim\)4$\times$ fewer denoiser evaluations, and matches autoregressive quality at high budgets. Analyses show improved self-correction and uncertainty calibration, making remasking markedly more compute-efficient.
FutureX-Pro: Extending Future Prediction to High-Value Vertical Domains
Jan 18, 2026Building upon FutureX, which established a live benchmark for general-purpose future prediction, this report introduces FutureX-Pro, including FutureX-Finance, FutureX-Retail, FutureX-PublicHealth, FutureX-NaturalDisaster, and FutureX-Search. These together form a specialized framework extending agentic future prediction to high-value vertical domains. While generalist agents demonstrate proficiency in open-domain search, their reliability in capital-intensive and safety-critical sectors remains under-explored. FutureX-Pro targets four economically and socially pivotal verticals: Finance, Retail, Public Health, and Natural Disaster. We benchmark agentic Large Language Models (LLMs) on entry-level yet foundational prediction tasks -- ranging from forecasting market indicators and supply chain demands to tracking epidemic trends and natural disasters. By adapting the contamination-free, live-evaluation pipeline of FutureX, we assess whether current State-of-the-Art (SOTA) agentic LLMs possess the domain grounding necessary for industrial deployment. Our findings reveal the performance gap between generalist reasoning and the precision required for high-value vertical applications.
Duality and Policy Evaluation in Distributionally Robust Bayesian Diffusion Control
Jun 24, 2025We consider a Bayesian diffusion control problem of expected terminal utility maximization. The controller imposes a prior distribution on the unknown drift of an underlying diffusion. The Bayesian optimal control, tracking the posterior distribution of the unknown drift, can be characterized explicitly. However, in practice, the prior will generally be incorrectly specified, and the degree of model misspecification can have a significant impact on policy performance. To mitigate this and reduce overpessimism, we introduce a distributionally robust Bayesian control (DRBC) formulation in which the controller plays a game against an adversary who selects a prior in divergence neighborhood of a baseline prior. The adversarial approach has been studied in economics and efficient algorithms have been proposed in static optimization settings. We develop a strong duality result for our DRBC formulation. Combining these results together with tools from stochastic analysis, we are able to derive a loss that can be efficiently trained (as we demonstrate in our numerical experiments) using a suitable neural network architecture. As a result, we obtain an effective algorithm for computing the DRBC optimal strategy. The methodology for computing the DRBC optimal strategy is greatly simplified, as we show, in the important case in which the adversary chooses a prior from a Kullback-Leibler distributional uncertainty set.
MC3D-AD: A Unified Geometry-aware Reconstruction Model for Multi-category 3D Anomaly Detection
May 04, 2025



3D Anomaly Detection (AD) is a promising means of controlling the quality of manufactured products. However, existing methods typically require carefully training a task-specific model for each category independently, leading to high cost, low efficiency, and weak generalization. Therefore, this paper presents a novel unified model for Multi-Category 3D Anomaly Detection (MC3D-AD) that aims to utilize both local and global geometry-aware information to reconstruct normal representations of all categories. First, to learn robust and generalized features of different categories, we propose an adaptive geometry-aware masked attention module that extracts geometry variation information to guide mask attention. Then, we introduce a local geometry-aware encoder reinforced by the improved mask attention to encode group-level feature tokens. Finally, we design a global query decoder that utilizes point cloud position embeddings to improve the decoding process and reconstruction ability. This leads to local and global geometry-aware reconstructed feature tokens for the AD task. MC3D-AD is evaluated on two publicly available Real3D-AD and Anomaly-ShapeNet datasets, and exhibits significant superiority over current state-of-the-art single-category methods, achieving 3.1\% and 9.3\% improvement in object-level AUROC over Real3D-AD and Anomaly-ShapeNet, respectively. The source code will be released upon acceptance.
SMPL: Simulated Industrial Manufacturing and Process Control Learning Environments
Jun 17, 2022
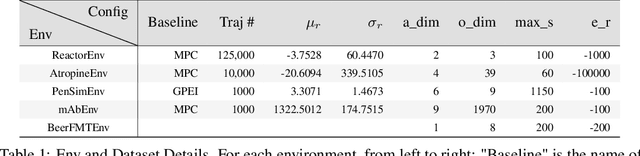
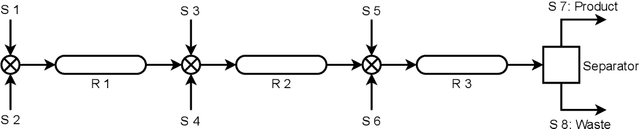
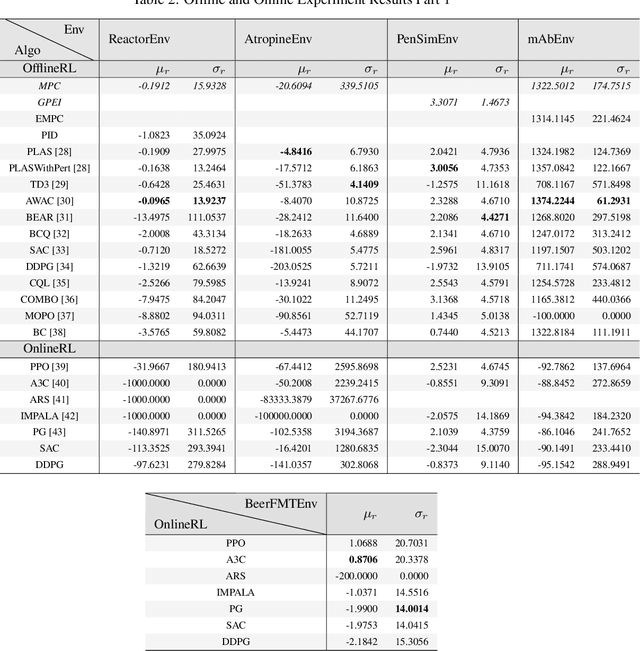
Traditional biological and pharmaceutical manufacturing plants are controlled by human workers or pre-defined thresholds. Modernized factories have advanced process control algorithms such as model predictive control (MPC). However, there is little exploration of applying deep reinforcement learning to control manufacturing plants. One of the reasons is the lack of high fidelity simulations and standard APIs for benchmarking. To bridge this gap, we develop an easy-to-use library that includes five high-fidelity simulation environments: BeerFMTEnv, ReactorEnv, AtropineEnv, PenSimEnv and mAbEnv, which cover a wide range of manufacturing processes. We build these environments on published dynamics models. Furthermore, we benchmark online and offline, model-based and model-free reinforcement learning algorithms for comparisons of follow-up research.